mission planner规划航点及任务
本文介绍的方法适用于apm固件类型飞行器。
设置家的位置
对于直升机/多旋翼,家的位置为解锁起飞的位置。如果飞行器执行rtl返航将返回到解锁起飞的位置,所以需要把飞行器放置在您想降落的位置。
对于固定翼,家的位置为首次获取到的gps定位位置,如果执行rtl将返回首次获取到gps定位的位置。
可以在地面站地图上移动“home”图标更改和设置家的位置。
说明
在下面的截图中,一个直升飞机的任务是从20米的自动起飞开始; 然后去航点2上升到100米的高度,然后等待10秒钟; 那么飞行器将进入航点 3(途中降至50米高度),然后返回起始点。 由于默认海拔高度为100米,所以返回到100米。 返回到到起始位置后,飞行器将着陆。 任务假设起始位置设在家的位置。
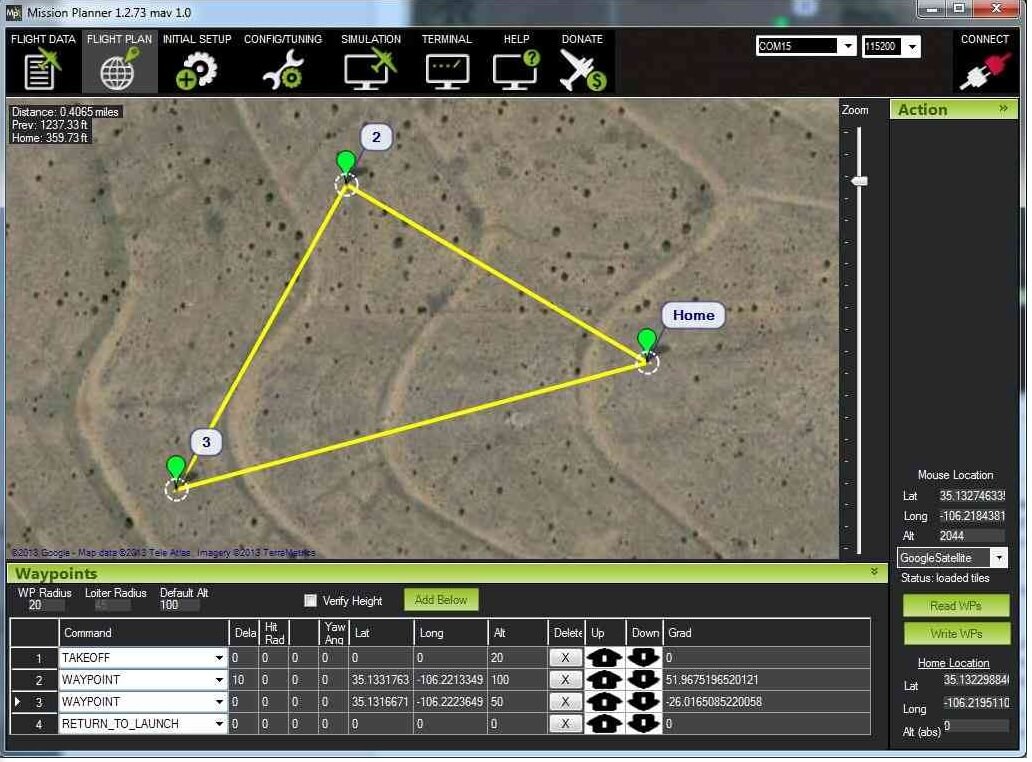 您可以输入航点和其他命令(有关详细信息,请参阅下面的任务命令部分)。在每行的下拉菜单中,选择所需的命令。列名称将会更改,以显示该命令需要哪些数据。可以通过点击地图输入纬度和经度。海拔高度是相对于你的起始高度/家的位置,所以如果你设置100米,例如,它将飞行100米以上。
您可以输入航点和其他命令(有关详细信息,请参阅下面的任务命令部分)。在每行的下拉菜单中,选择所需的命令。列名称将会更改,以显示该命令需要哪些数据。可以通过点击地图输入纬度和经度。海拔高度是相对于你的起始高度/家的位置,所以如果你设置100米,例如,它将飞行100米以上。
默认Alt是输入新航路点时的默认高度。它也是RTL(返回启动)模式飞行高度,如果你有设置默认ALT,该高度就是rtl飞行高度;如果您没有设置,您的飞机将尝试维持开启RTL时的高度。
verify alt(验证高度)意味着任务规划器将使用Google Earth拓扑数据在每个航路点调整所需的高度,以反映下面的地面高度。所以如果你的航路点在山上,如果选择了这个选项,任务计划员将根据山的高度增加你的航点设置。这是一个很好的方法,以确保你不会撞到山!
规划好任务后,选择写入,并将其发送到APM并保存在EEPROM中。您可以通过选择“读取”来确认它是您想要的。
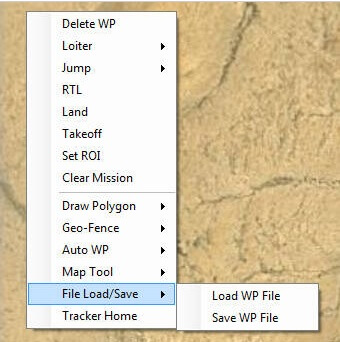
通过右侧按钮可以保存航行任务,加载航行任务,方便重复执行任务。
提示
预取:您可以下载离线地图。单击“地图工具”按钮》预读取航点路径(离线地图),然后按住Alt键绘制一个框以下载所选位置的图像。
绘制多边形:这允许您绘制多边形(右键单击),并自动在所选区域上创建航点。
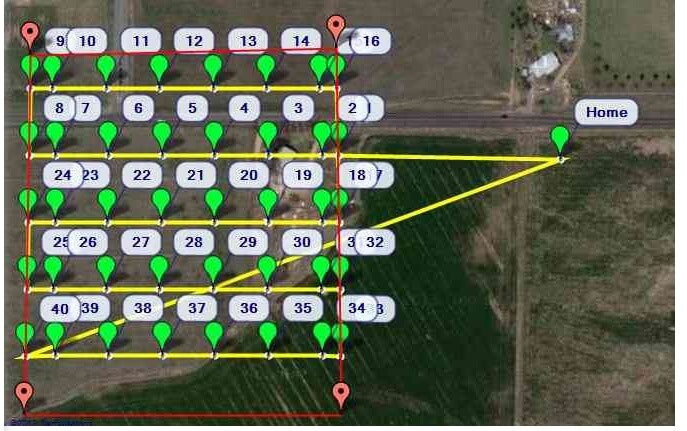
快捷绘制多边形航线:鼠标右键菜单》绘制多边形》增加多边形点的绘制一个多边形》自动航点》simple grid然后点击Grid菜单,在弹出的窗口填入每个航点距离高度》确认,然后在定义在每个航点的动作。
将您的家庭位置设置到当前位置:追踪器的家》设置在这,它将将您的家庭位置设置为当前坐标。
Auto grid :Auto grid功能可以生成“割草机”轨迹,以收集当地的图片。在地图上选择鼠标右键,选择多边形绘制需要的区域,选择auto WP--Grid菜单,按照对话框自动处理高度和距离,将自动生成如下网格航点(操作跟快捷绘制多边形形航线一致:
任务指令:在地图的下方有表格的列表,将按当前飞行器类型产生指令列表,并增加一列航向参数需要用户提供。这些指令包括:导航到航点,临近盘旋,执行特殊动作(如拍照等)和条件指令. 任务指令:在地图的下方有表格的列表,将按当前飞行器类型产生指令列表,并增加一
任务指令:在地图的下方有表格的列表,将按当前飞行器类型产生指令列表,并增加一
列航向参数需要用户提供。这些指令包括:导航到航点,临近盘旋,执行特殊动作(如拍照等)和条件指令。全部的指令在Mavlink Mission Command Messages 定义。
任务指令参考
MavLink协议定义了大量的Mav_cmd 航点指令(通过MavLink_mission_item_message传递),飞控板处理这些指令和命令行参数,这些命令必须是与指定飞行器相关的,无效指令将被忽略。
每种飞行器只执行相关的命令和命令行参数,不相关的指令忽略不执行,可能还有些有用的命令行参数没有被处理,由于消息大小限制。
指令分类:navigation导航命令用于控制无人机移动,包括:起飞,移动到航点,改变
飞行姿态,着陆;DO动作命令:辅助功能,不影响飞行位置,比如相机快门,抛投伺服等;2.
Condition条件命令,用于延迟DO命令,至到条件满足,例如:UAV达到指定高度和指定航点的距离条件。对于指定航点,一般先执行NAV导航指令,只到完成导航任务或在航点一定误差范围内,然后在执行一些列DO命令当条件完成后。
Mission Planner支持的旋翼机指令:
[ ] MAV_CMD_MISSION_START:启动当前任务,自动(不用油门),参数:无
[ ] MAV_CMD_COMPONENT_ARM_DISARM:电机上电或掉电,参数:1,2
[ ] MAV_CMD_NAV_WAYPOINT:移动到指定航点,7个参数:2,5,6,7
[ ] MAV_CMD_NAV_RETURN_TO_LAUNCH:返回Home point或Rally Point,参数:无
[ ] MAV_CMD_CONDITION_DELAY:抵达航点后,延迟执行DO命令,参数:1 时间长度:s
[ ] MAV_CMD_CONDITION_DISTANCE:抵达当前航点指定的距离范围内,参数:1 距离
- [ ] MAV_CMD_DO_CHANGE_SPEED:改变目标水平速度或油门,参数:2 速度
- [ ] MAV_CMD_DO_SET_HOME:动作,设置Home Point位置,参数:1,5,6,7
- [ ] MAV_CMD_DO_SET_SERVO:动作,设定给定的伺服输出管脚PWM,参数:1,2
[ ] MAV_CMD_DO_SET_RELAY:动作,设定指定输出管脚高/低电平 参数:1,2、
[ ] MAV_CMD_DO_REPEAT_SERVO:给指定输出管脚指定pwm和中立波,按指定周期循环次
数,参数:1-管脚号 2-pwm 3-repeat# 4-cycle(s)
- [ ] MAV_CMD_DO_REPEAT_RELAY:给指定输出管脚指定高地电平,按指定周期循环次数,
参数:1-管脚号 2-pwm 3-repeat# 4-cycle(s)
[ ] MAV_CMD_DO_DIGICAM_CONFIGURE (Camera enabled only): MAV_CMD_DO_DIGICAM_CONTROL (Camera enabled only): MAV_CMD_DO_SET_CAM_TRIGG_DIST (Camera enabled only): MAV_CMD_DO_SET_ROI:指定云台指向区域,参数:5,6,7
[ ] MAV_CMD_DO_SET_MODE:设置系统模式,preflight,armed,unarmed,参数:1
[ ] MAV_CMD_DO_JUMP :切换到指定航点多次,参数:1,2
[ ] MAV_CMD_NAV_TAKEOFF:起飞指令,所有任务的第一次指令,参数:7
[ ] MAV_CMD_NAV_LAND:着陆,指定区域,参数:5,6 需退出Auto模式,切断动力 MAV_CMD_NAV_LOITER_UNLIM:飞到指定区域,然后盘旋,参数:5,6,7
[ ] MAV_CMD_NAV_LOITER_TURNS:指定区域盘旋,给定盘旋半径,参数:1,5,6,7 MAV_CMD_NAV_LOITER_TIME:指定区域盘旋,给定盘旋时间,参数:1,5,6,7
[ ] MAV_CMD_CONDITION_CHANGE_ALT :按指定爬升或降落速度改变至指定高度,参数:1,7。
[ ] MAV_CMD_NAV_SPLINE_WAYPOINT:按照曲线形式航行到指定位置,参数:15,6,7 MAV_CMD_CONDITION_YAW:航向更改,参数:1,3,4
[ ] MAV_CMD_DO_MOUNT_CONTROL:控制相机云台,参数:1,2,3 pitch,roll,yaw度数
[ ] MAV_CMD_DO_PARACHUTE(Parachute enabled only)
[ ] MAV_CMD_DO_GRIPPER(EPM enabled only)
[ ] MAV_CMD_DO_GUIDED_LIMITS(NAV_GUIDED only)
[ ] MAV_CMD_NAV_GUIDED_ENABLE(NAV_GUIDED only)
3
相机控制与自动操作
相机快门和云台指令
3
个通道
在飞行器移动的间隔时间或指定的航点上执行快门动作,
如果相机安装在云台上,
还可
以控制云台的指向
对于简单的应用,
可以手动控制航点和快门指令,
对于复杂的测绘任务,
自动生成任意
区域的指令任务。
云台指令
:DO_SET_ROI
云台指向指定区域,
DO_MOUNT_CONTROL
云台控制到
roll
,
pitch,yaw
方向
伺服指令:
DO_SET_SERVO:DO_SET_RELAY
给指定的驱动信号