航线任务
自动航线任务是无人机智能化、自动化的重要一环,也是区别于传统航空模式的重要标志。通过预设航线命令(高度控制,待留时间,相机触发、各种条件触发、通道触发等)实现无人机在广域巡查、航空测绘、物流运输等场景下的超视距飞行需求;通过LGC/Missionplanner/QGC等地面站程序可以对航线任务进行编辑和上传至飞行器。
进入LGC航线规划
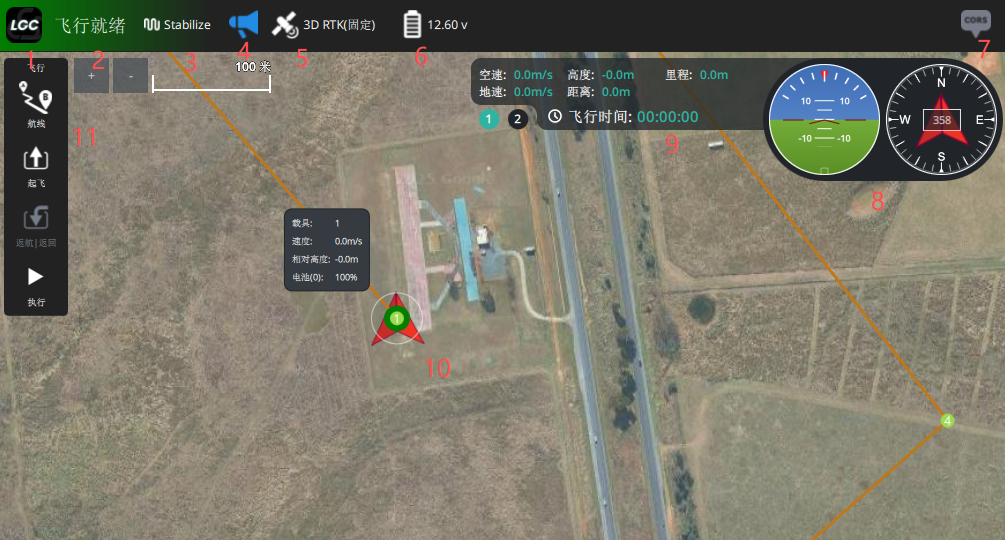
- 点击飞行数据界面的航线图标;进入航线规划界面 //标识11处
多旋翼简易航线
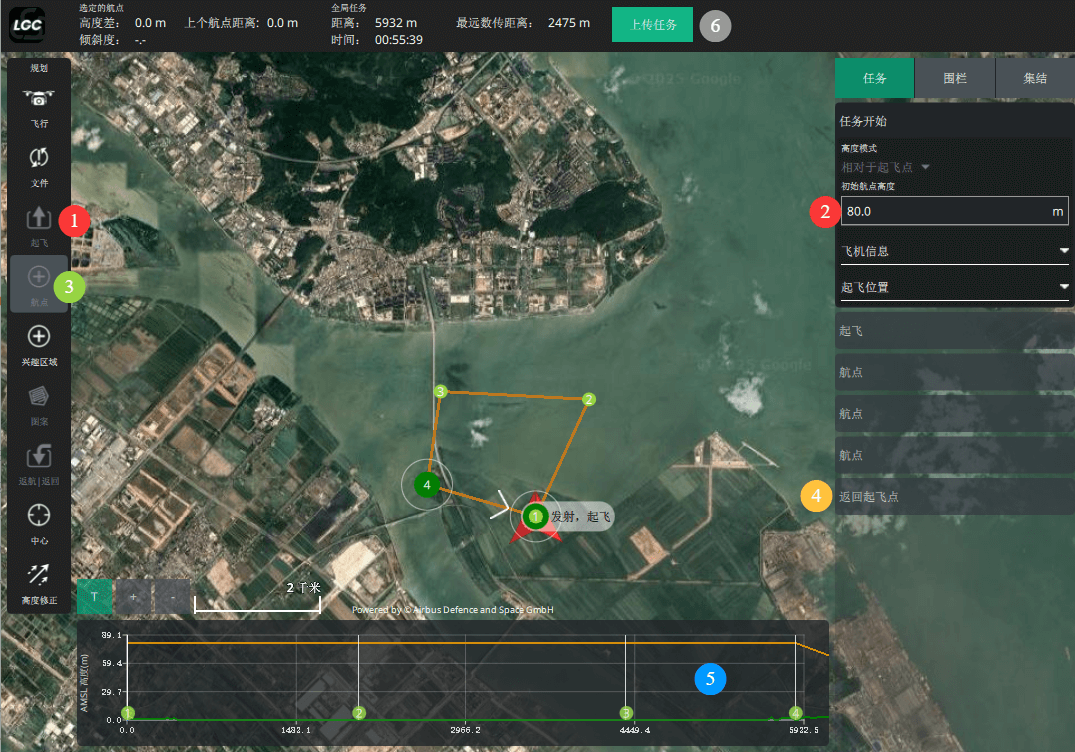
- 设置航线高度(将作为航点的默认高度);
- 添加起飞命令,点击起飞选项卡可以设置起飞高度,到高度后往下个航点飞行;
- 添加航点:点击飞行工具栏“航点”后在地图上点击需要前往的目标点;新增航点;
//可通过点击上个航点选项卡,再点击目标点,在航点间插入新航点; - 添加返航命令:点击飞行工具栏“返航,返回”在航线末端添加返回起飞点;
- AMSL地形高度检查:检查航线是否与地形高度贴近冲突;如有冲突可通过‘高度修正’调整冲突路径的高程;
- 上传航线,将航线上传至飞行器;

测绘巡线
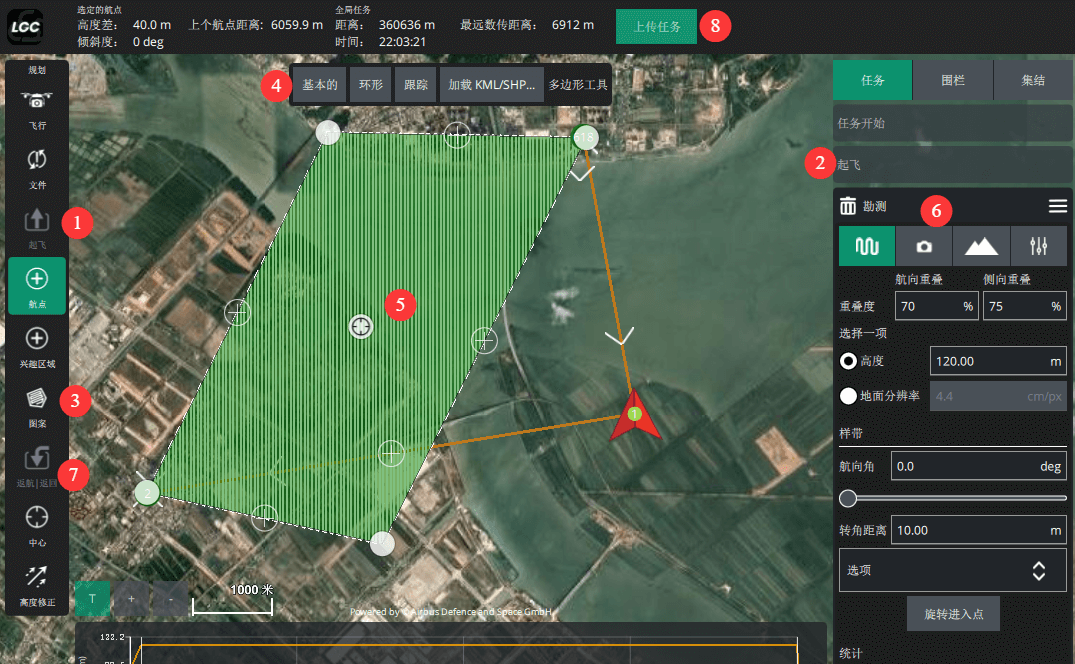
- 添加起飞命令,点击起飞选项卡可以设置起飞高度,到高度后往下个航点飞行;
添加航点(可选):点击飞行工具栏“航点”后在地图上点击需要前往的目标点;新增航点;
//可插入航点引导进入测绘航线的路径;图形>勘测》基本的/环形等:新建测绘区域,可拉动区域顶点调整到合适的区块;勘测选项卡可以根据测绘需要设置重叠率,高度,相机设置等参数;
- 添加返航命令:点击飞行工具栏“返航,返回”在航线末端添加返回起飞点;
- 上传航线,将航线上传至飞行器;
带状航线(测绘/巡查巡线)
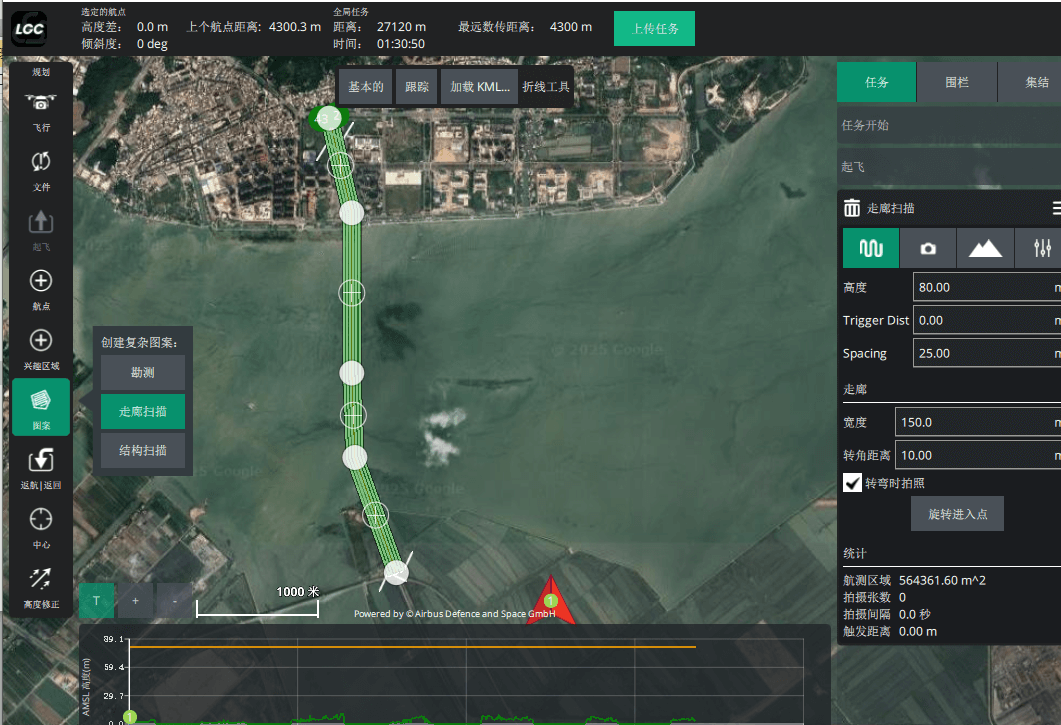
- 添加起飞命令,点击起飞选项卡可以设置起飞高度,到高度后往下个航点飞行;
添加航点(可选):点击飞行工具栏“航点”后在地图上点击需要前往的目标点;新增航点;
//可插入航点引导进入航线的路径;图形>走廊扫面》基本的/跟踪等:新建带状航线;选项卡可设置高度;带状宽度和相机设置等;
- 添加返航命令:点击飞行工具栏“返航,返回”在航线末端添加返回起飞点;
- 上传航线,将航线上传至飞行器;
立体扫描(3D建模/幕墙清洗)
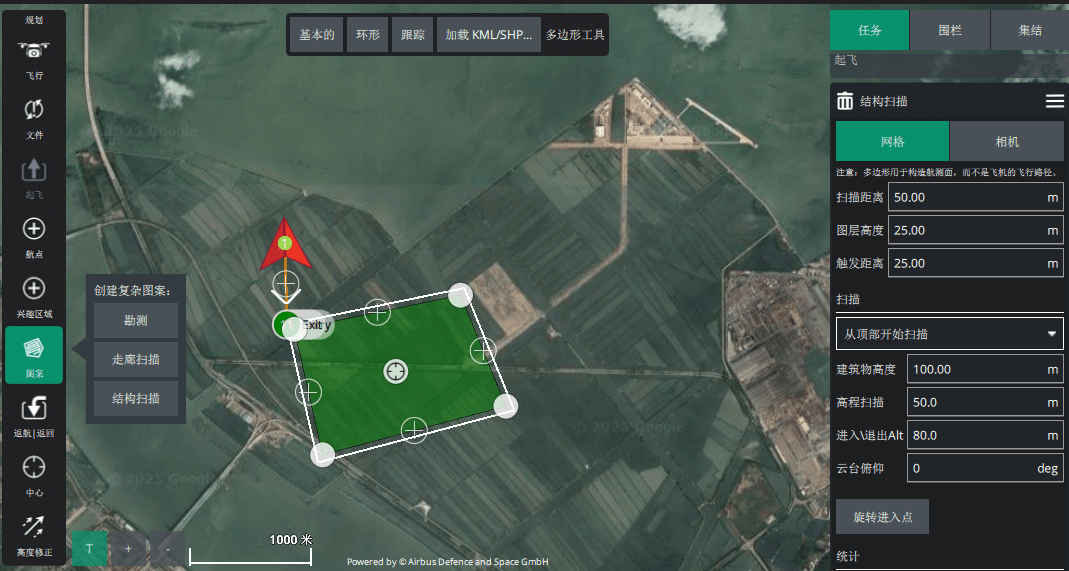
- 添加起飞命令,点击起飞选项卡可以设置起飞高度,到高度后往下个航点飞行;
- 图形》结构扫描》基本的;跟踪等:新建立体扫描航线;可设置扫描距离、高程高度等;
- 添加返航命令:点击飞行工具栏“返航,返回”在航线末端添加返回起飞点;
- 上传航线,将航线上传至飞行器;
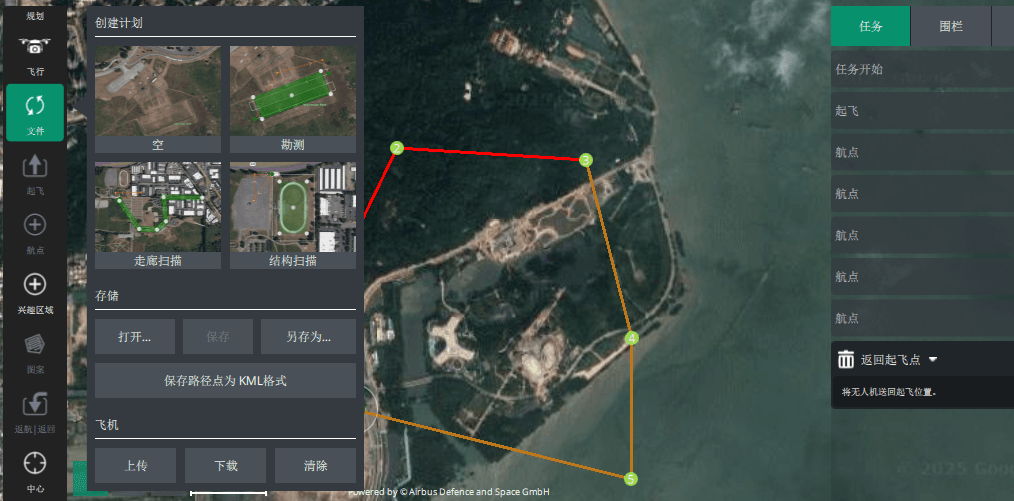
航线下载与导入
[!TIP] 通过飞行工具栏的‘文件’工具可以选择本地存储(另存为)或打开航线文件以及地面站与飞机之间的上传/下载航线。
任务命令编辑器
[!NOTE] 航线任务不仅支持起飞/降落/返航指令;还有丰富多样的任务命令。
- 常用的任务指令:点击“1”处下拉菜单;弹出常用任务命令选择框;选择需要的命令;即可修改任务指令类型
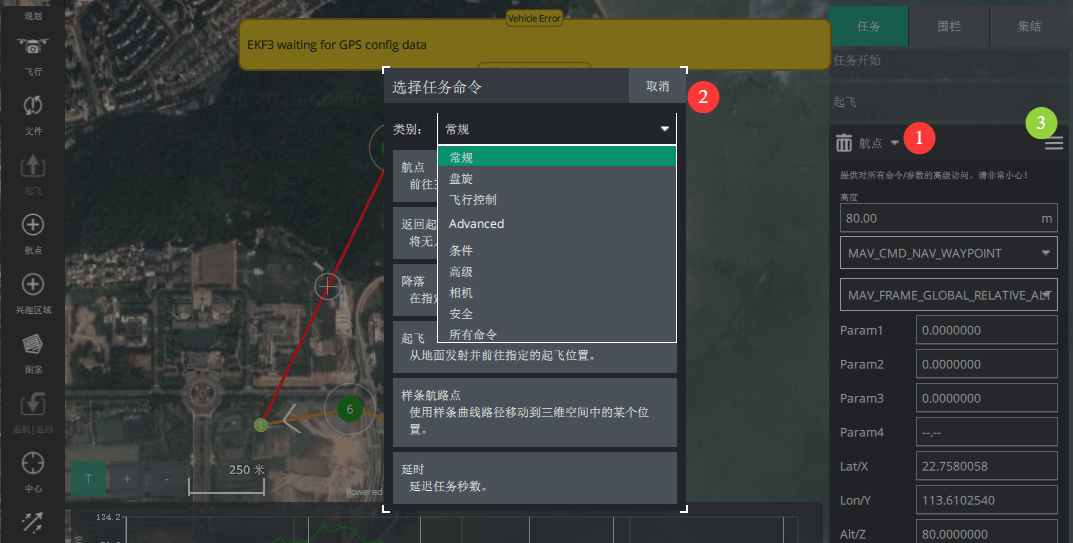
- 显示所有值 可以设置航点命令、高度、经纬度及开放参数等