LGC地面站
LecentGroundControl(简称LGC)是针对无人系统应用与配置开发的地面站软件。它在QGroundControl强大的功能基础上,针对ArduPilot固件的设置、调试和应用进行了大量的优化工作,并增加了集群编队、远程ID、网络RTK和模拟器热门功能。
主要新增功能
- 网络RTK(NTRIP/CORS)支持
- 飞行模式锁
- 航线高度修正
- Mavlink转发
- RTMP视频推流
- 远程ID(无人机唯一识别码)
- 多台无人机的实时飞行数据
- 固定翼/垂直起降固定翼/多旋翼集群编队
- 全部参数表加密
- 仿真器功能
- 航线高度修正
- 伺服(Servo)配置
- 飞行模式锁
- 固定翼/垂直起降固定翼风向标
- 固定翼/垂直起降固定翼机架设置
主要优化功能
- 完善的系统语言汉化
- 图形化的GPS/电源模块/空速计设置
- 优化机载ADSB支持
- 优化强制检查清单
- 电源信息栏支持电压和百分比设置
- 双电池和双GPS显示
- 多旋翼机架类型及图标示意
- 电机测试与设置(多旋翼/VTOL)
- 多旋翼/垂起/固定翼调参
- VTOL安全返航和多旋翼辅助触发器
- MAVlink吊舱云台控制
- 垂直起降固定翼飞行实时属性修改
- 修复已知的QGC存在的BUG
下载和安装LGC
连接至地面站
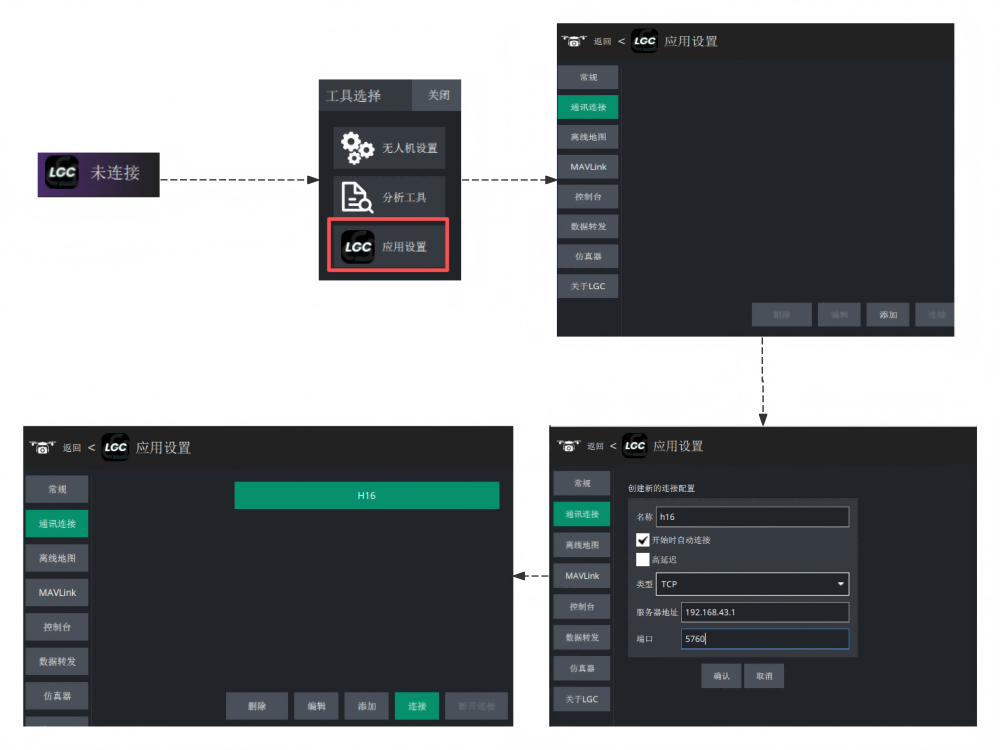
[!NOTE] 当设备接入时,LGC地面站会搜索设备自动连接;如果没有自动连接,需要按照下方设置手动建立连接。
- 运行LGC地面站
- 点击LGC图标》应用设置》通信连接》选择已经建立的链接端口点击连接或新建连接。
- 等待地面站连接完成。
新建连接:
- 点击添加
- 命名连接名称
- 如果希望后续使用能够自动连接则勾选。
- 选择连接类型(串口(USB)/TCP/UDP);UDP连接可不输入服务器地址。
- 串口连接需要设置端号和控制器串口波特率;TCP和UDP需要设置连接的端口号(链路设备的连接端口号)
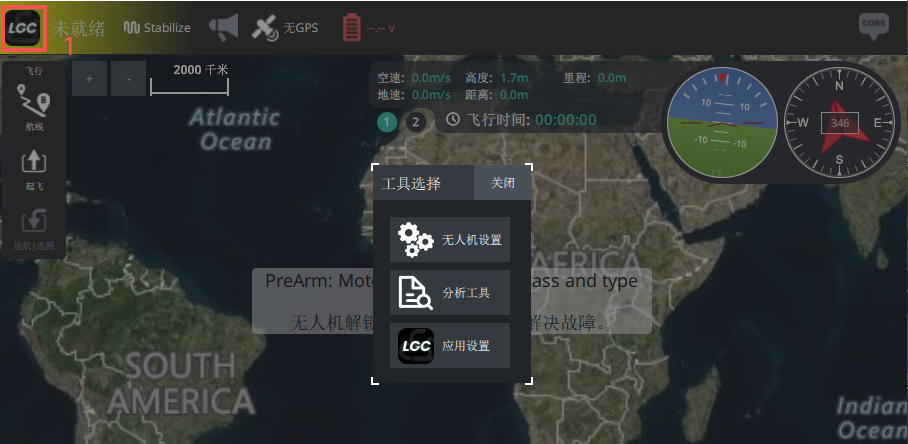
LGC主界面概况
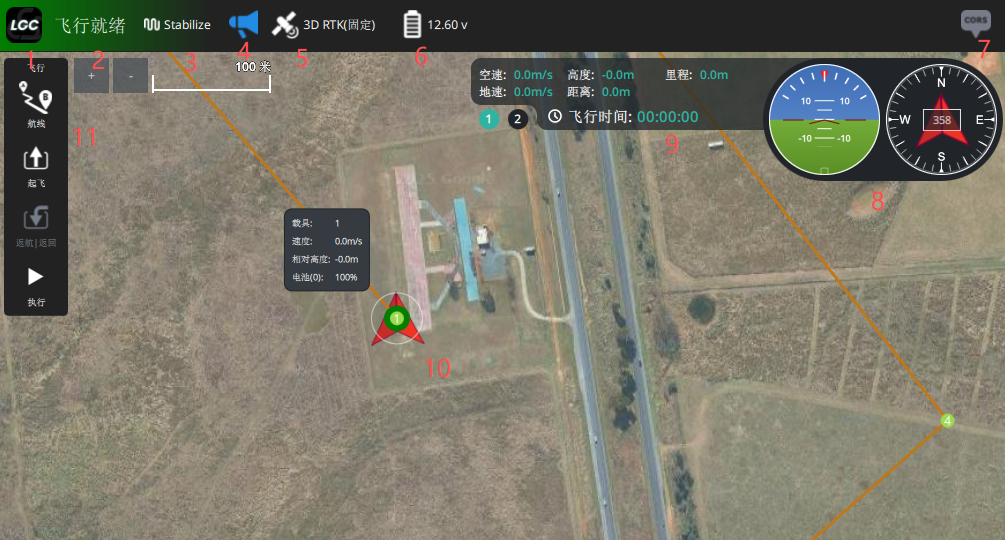
- 1、LGC设置入口,点击可进入无人机设置、分析设置和LGC设置页面
- 2、飞行状态显示栏(飞行就绪/未就绪)
- 3、飞行模式:点击进行飞行模式切换
- 4、无人系统消息栏,当有错误信息时变为警报图标,点击可查看飞机回传的消息。
- 5、GPS/RTK卫星定位状态显示
- 6、电池状态显示:可设置为百分比或者电压
- 7、网络RTK(CORS)账号设置入口
- 8、飞行状态球,可查看方向和姿态水平球;当为固定翼时,可指示风向和风速。
- 9、飞行数据栏:第一页为固定项,第二页可选择显示的数据
- 10、载具实时位置和状态简报
- 11、飞行工具栏:包含航线规划入口、起飞指令、降落指令和执行暂停。
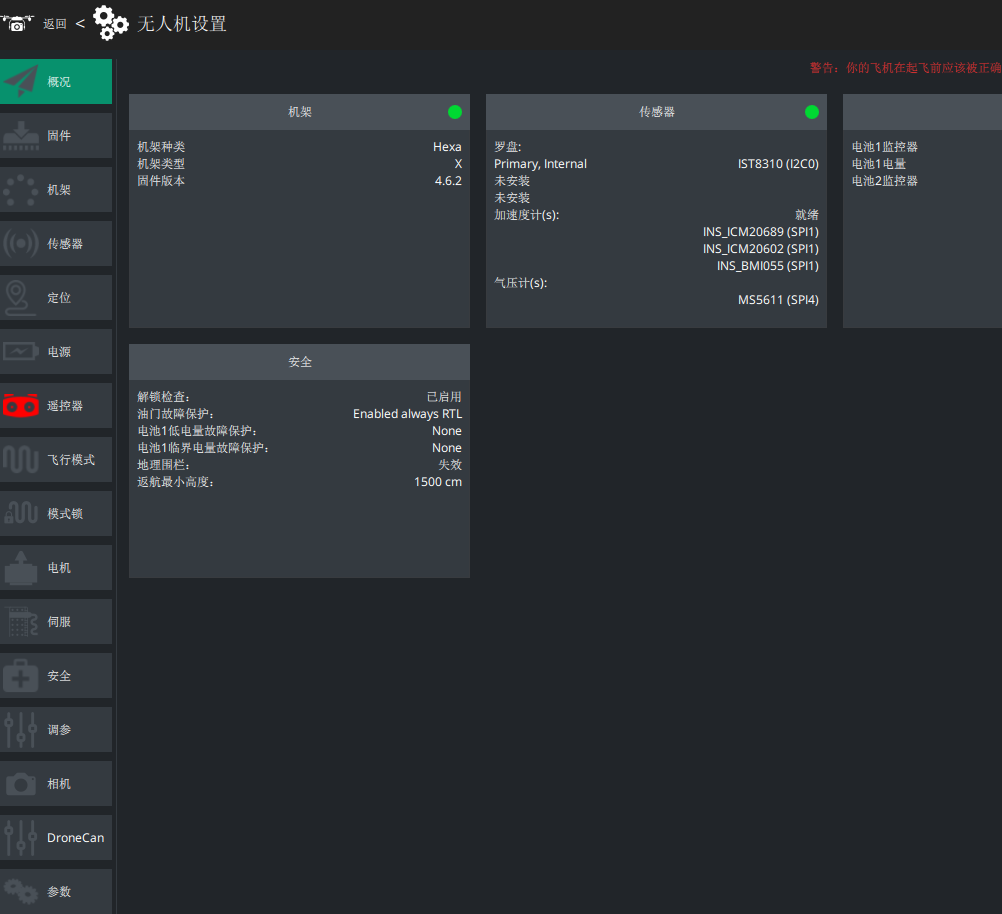
无人机设置
无人机设置界面包含无人机状态概况、固件、机架、传感器设置、GPS/RTK设置(安全开关)、电源模块设置、遥控器设置、飞行模式、模式锁、电机、伺服(固定翼/垂起)、安全、调参、相机、Dronecan和全部参数等无人机配置相关的页面。
LGC设置页面
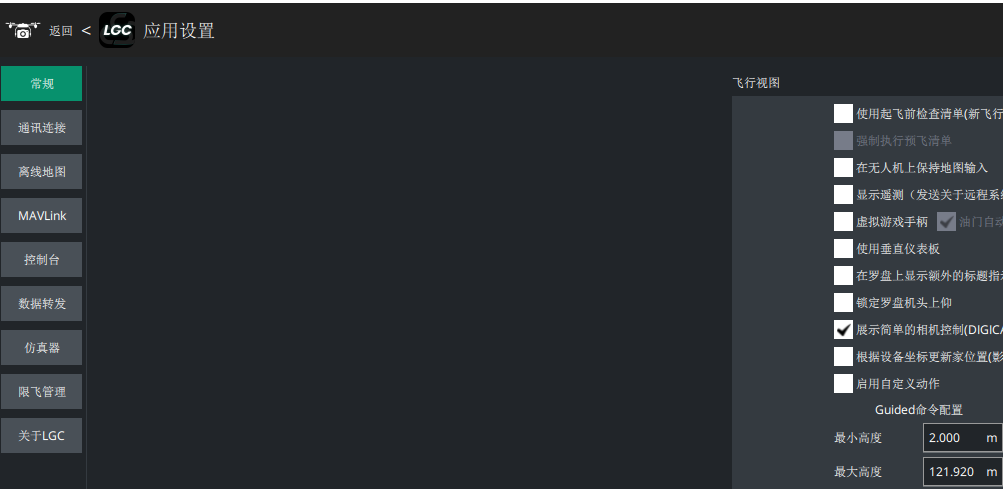
- 常规配置:飞行视图(起飞前检查清单、虚拟遥感、视频设置等)、计划视图、量程单位、系统语言和地图设置、日志和自动连接设置、视频转发和ADSB等
- 通信连接:用于新建或者管理地面站与飞机的连接
- 离线地图:导入/导入地图源
- MAVLINK:MAVLINK转发和LGC系统ID设置
- 控制台:打印LGC的交互日志信息
- 数据转发:将MAVLINK消息转发至指定的飞行器
- 仿真器(仅限于Ardupilot):支持ArduPilot仿真器插件,用于航线规划等模拟飞行
- 限飞管理:机场/首都禁飞区设置及授权区设置
- 关于LGG:LGC版本信息和手册等
[!NOTE] 不同类型的框架会有不一样的设置界面和菜单。
分析工具界面
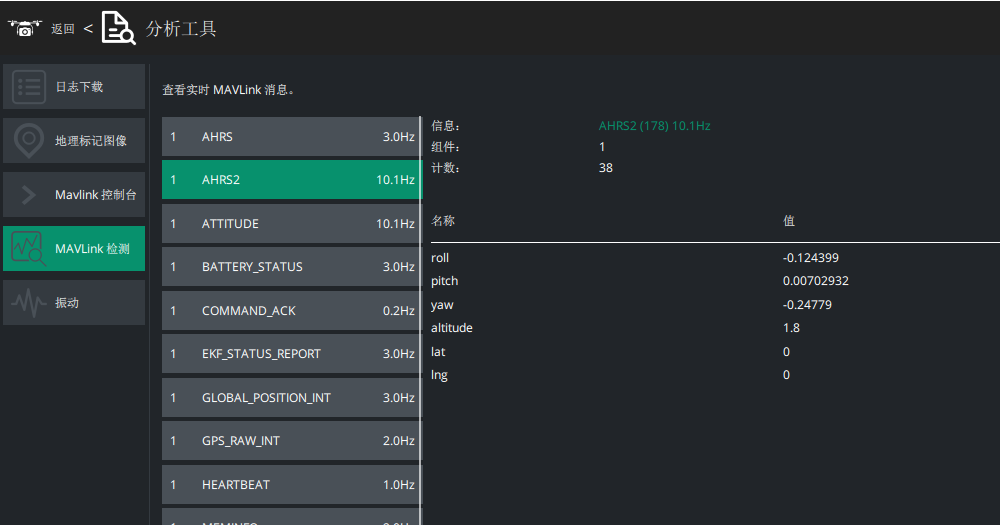
- 日志下载:用于下载闪存日志
- 地理标记图像:将POS信息写入照片
- MAVLINK控制台:用于PX4固件下的配置于调试
- MAVLINK检测:打印显示消息数据
- 振动:显示控制器振动信息