ArduPilot机架类型配置
ArduPilot的机架类型由FRAME_CLASS(机架类别)和FRAME_TYPE(布局类型)参数设定,设置后将自动分配电机通道映射和控制算法。错误的设置将导致无人机起飞旋转或者翻转;应根据物理框架设置匹配的机架类型。
[!TIP] ArduPilot支持的完整多旋翼机架列表可参阅连接电调与电机页面.
通过LGC地面站,可以简易正确的配置机架类型
- 连接控制器,并进入无人机设置》机架设置页面。
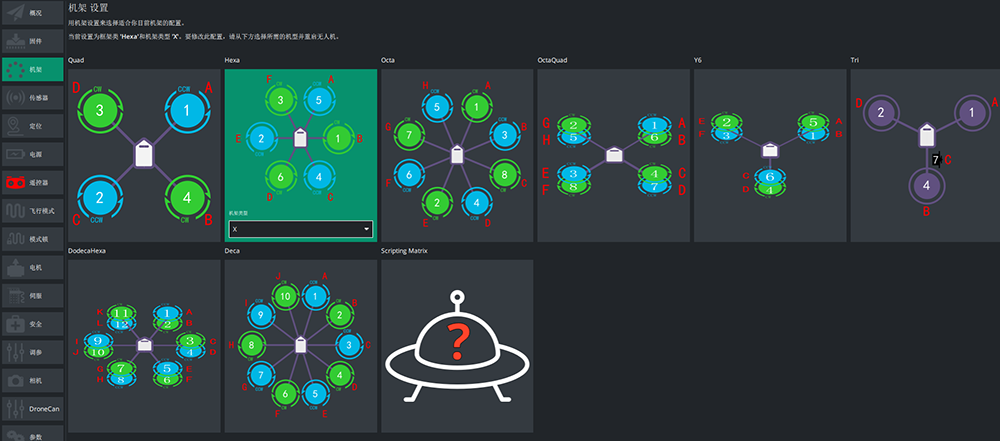
- 点击选择机型图标。
- 在机架类型信息栏中下拉选择布局类型。
- 重启控制器以刷新配置参数。
电调电机与控制器的连接
按在下方机型布局电机布局图,确定电机/电调的分配顺序;序号与控制器M1~M16标识顺序一一对应。如果带有协处理器(IO)的板子M9~M16,往往被标识为A1~A8。
四轴电机布局图






[!TIP] Quad A尾翼及V尾翼构型,偏航控制不依赖前部电机(NYT 模式)。电机转向不影响基础操作;但若前部电机非反向旋转,滚转、俯仰输入会引发不利偏航耦合,缩减偏航控制动态范围。






[!TIP] 四轴 “无偏航力矩”(NO YAW TORQUE)框架,主要适用于垂直起降尾撑式布局,且需配备大型控制面。此类框架下,电机旋转方向对基础运行无关键影响;但如果电机转向未按标准四轴框架的常规模式设定,滚转与俯仰指令输入时,就会诱发不利偏航效应,进而削弱固定翼控制面的偏航控制动态范围。


六轴电机布局图





八轴电机布局图







四轴八桨电机布局图







Y6机型



TRICOPTER框架


[!TIP] 三旋翼飞行器偏航控制依赖尾部(或机头)伺服机构,电机转向不影响基础操作;但若前部电机非反向旋转,滚转、俯仰输入会引发不利偏航效应,缩减偏航控制动态范围。若尾部(或机头)伺服偏航响应方向错误,可将 RCn_REVERSE(遥控器输入)或 SERVOn_REVERSE(倾斜伺服)参数设为 1(默认 0),详情参见三旋翼飞行器设置页面。
双旋翼

[!TIP] 如果需要,双旋翼电机可按与所示方向相反的方向旋转(例如,左旋顺时针,右旋逆时针)。
六轴12桨


十轴多旋翼


自定义框架
ArduPilot通过LUA脚本可实现最多32个电机的控制,用于构建自定义框架类型。每个电机的横滚、俯仰和偏航系数必须通过脚本计算并加载。这可通过将FRAME_CLASS设置为15——脚本矩阵来实现。 比如典型的8轴16桨的支持,可通过8轴16桨设置说明查看详细教程。


识别顺时针和逆时针螺旋桨
图中展示了两种螺旋桨类型:顺时针旋转的推式螺旋桨与逆时针旋转的拉式螺旋桨。通过桨叶形状辨别螺旋桨类型是最可靠的方法,具体特征如下:桨叶较厚的一侧为前缘,这一侧会随螺旋桨的旋转方向行进;后缘则呈更为锐利的锯齿状,且通常厚度更薄。
