解锁警报与故障排除
ArduPilot 包含一套解锁自检功能,可在检测到问题时阻止飞行器解锁起飞。这些检查有助于防止崩溃或失控,但如有必要,部分检查也可被禁用(看后半部分)。
传感器相关故障排查
1.1 加速度计(Accel)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| 3D Accel calibration needed | 加速度计未校准 | 完成加速度计校准 |
| Accels calibrated requires reboot | 加速度计校准后需重启 | 重启飞控 |
| Accels inconsistent | 两个加速度计偏差 > 0.75m/s² | 重新校准、预热、重启 |
| Accels not healthy | 至少一个加速度计无数据 | 重启飞控或寻求售后帮助 |
1.2 陀螺仪(Gyro)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Gyros inconsistent | 两个陀螺仪偏差 > 5 deg/s | 重启并保持静止 |
| Gyros not calibrated | 启动时陀螺校准失败 | 重启并保持静止 |
| Gyros not healthy | 至少一个陀螺仪无数据 | 重启飞控或寻求售后帮助 |
| Gyro x rate yHz < loop rate z Hz | 陀螺输出率低于主循环频率 | 降低 SCHED_LOOP_RATE |
1.3 罗盘(Compass)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Compass not calibrated | 罗盘未校准,COMPASS_OFS_X, _Y, _Z | |
| Compass calibrated requires reboot | 罗盘校准后需重启 | 重启飞控 |
| Compass calibration running | 罗盘校准正在进行 | 完成或取消校准 |
| Compass not healthy | 至少一个罗盘无数据 | 检查连接与配置 |
| Compass offsets too high | 罗盘偏移过大 | 重新安装罗盘、远离金属、重新校准 |
| Compasses inconsistent | 两个罗盘角度或磁场不一致 | 检查安装方向、重新校准、远离金属 |
| Check mag field (xy diff:x>875) | 水平磁场异常 | 远离金属、重新校准 |
| Check mag field (z diff:x>875) | 垂直磁场异常 | 远离金属、重新校准 |
| Check mag field: x, max y, min z | 磁场异常 | 远离金属、重新校准 |
1.4 气压计(Baro)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Altitude disparity | Baro 与 EKF 高度差 > 1m | 等待EKF稳定或重启 |
| EKF height variance | Baro 数据不稳定或振动过大 | 检查振动、增加减振 |
| Baro not healthy | 系统检测到气压计数据异常、故障 |
1.5 空速计(Airspeed)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Airspeed 1 not healthy | 空速传感器无数据 | 检查连接与配置 |
1.6 测距仪(Rangefinder)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Rangefinder x: Not Connected | 测距仪无数据 | 检查连接、供电、固件是否包含驱动 |
| RNGFNDx_PIN not set | 测距仪引脚未配置 | 设置 RNGFNDx_PIN |
| RNGFNDx_PIN=y invalid | 测距仪引脚配置错误 | 检查引脚设置 |
| RNGFNDx_PIN=y, set SERVOx_FUNCTION=-1 | 引脚冲突 | 将 SERVOx_FUNCTION 设置为 -1 |
1.7 视觉里程计(VisOdom)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| VisOdom: not healthy | 视觉里程计无数据 | 检查连接与配置 |
| VisOdom: out of memory | 飞控内存不足 | 禁用功能或更换飞控 |
1.8 测距传感器(Proximity)
| 消息 | 注释 | 解决办法 |
|---|---|---|
| PRXx: No Data | 测距传感器无数据 | 检查连接与配置 |
| PRXx: Not Connected | 测距传感器未连接 | 检查连接与配置 |
GPS/AHRS/EKF 相关故障排查
2.1 GPS 故障
| 消息 | 注释 | 解决办法 |
|---|---|---|
| GPS x: Bad fix | GPS 无有效定位 | 移至开阔的户外,确保具有良好的对空环境 |
| GPS x: not healthy | GPS 无数据 | 检查连接与供电 |
| GPS x: was not found | GPS 未连接或配置错误 | 检查连接与参数 |
| GPS positions differ by Xm | 两个 GPS 偏差 > 50m | 等待信号改善 |
| GPS blending unhealthy | 至少一个 GPS 数据质量差 | 检查天线、干扰源 |
| GPS and AHRS differ by Xm | GPS 与 EKF 偏差 > 10m | 等待 GPS 改善 |
| GPS alt error xm | GPS 与 Baro 高度差过大 | 参考 BARO_ALTERR_MAX |
| GPSx yaw not available | GPS 航向不可用 | 改善 GPS 信号 |
| GPS Node x not set as instance y | DroneCAN GPS 配置错误 | 检查 GPS1_CAN_NODEID / GPS2_CAN_NODEID |
| Same Node Id x set for multiple GPS | DroneCAN GPS 节点ID重复 | 确保节点ID不同 |
2.2 AHRS/EKF 故障
| 消息 | 注释 | 解决办法 |
|---|---|---|
| AHRS not healthy | AHRS/EKF 未就绪 | 等待初始化或重启 |
| AHRS: not using configured AHRS type | EKF3 未就绪,使用 DCM | 移至室外、确保 GPS 正常 |
| AHRS: waiting for home | GPS 未定位 | 等待 GPS 锁定 |
| EKF attitude is bad | EKF 姿态不可靠 | 等待、重启、检查传感器 |
| EKF3 Roll/Pitch inconsistent by x degs | 姿态估计不一致 | 改善 GPS、等待 |
| EKF3 Yaw inconsistent by x degs | 偏航估计不一致 | 等待或重启 |
| EKF3x vel error y | 速度残差过大 | 检查 GPS |
| EKF3 waiting for GPS config data | GPS 自动配置未完成 | 检查 GPS 连接 |
遥控(RC)相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| RC not calibrated | 遥控器未校准 | 完成遥控器校准 |
| RC calibrating | 遥控器校准中 | 完成校准 |
| RC not found | 无遥控信号但启用了 failsafe | 打开遥控器或检查连接 |
| Radio failsafe on | 遥控 failsafe 触发 | 检查遥控器、接收机、FS_THR_VALUE |
| Roll (RCx) is not neutral | 横滚摇杆未居中 | 居中或重新校准 |
| Pitch (RCx) is not neutral | 俯仰摇杆未居中 | 居中或重新校准 |
| Yaw (RCx) is not neutral | 偏航摇杆未居中 | 居中或重新校准 |
| Throttle (RCx) is not neutral | 油门摇杆未居中 | 居中或重新校准 |
| Roll radio max too low | 横滚通道最大值 < 1700 | 重新校准 |
| Roll radio min too high | 横滚通道最小值 > 1300 | 重新校准 |
| Pitch radio max too low | 俯仰通道最大值 < 1700 | 重新校准 |
| Pitch radio min too high | 俯仰通道最小值 > 1300 | 重新校准 |
| Yaw radio max too low | 偏航通道最大值 < 1700 | 重新校准 |
| Yaw radio min too high | 偏航通道最小值 > 1300 | 重新校准 |
| Throttle radio max too low | 油门通道最大值 < 1700 | 重新校准 |
| Throttle radio min too high | 油门通道最小值 > 1300 | 重新校准 |
| RCx_MAX is less than RCx_TRIM | RC 配置错误 | 调整 TRIM 或重新校准 |
| RCx_MIN is greater than RCx_TRIM | RC 配置错误 | 调整 TRIM 或重新校准 |
| Multiple SERIAL ports configured for RC input | RC 输入端口重复 | 检查 RC 输入配置 |
电机/伺服/输出相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Motors: no SERVOx_FUNCTION set to MotorX | 电机输出未配置 | 检查 SERVOx_FUNCTION |
| Motors: Check MOT_PWM_MIN and MOT_PWM_MAX | PWM 范围配置错误 | 设置为 1000 / 2000 并重新校准电调 |
| Motors: MOT_SPIN_ARM > MOT_SPIN_MIN | 电机启动值设置错误 | 调整参数 |
| Motors: MOT_SPIN_MIN too high | 电机最低转速过高 | 降低 MOT_SPIN_MIN |
| Motors Emergency Stopped | 电机紧急停止 | 释放紧急停止开关 |
| Servo voltage to low (Xv < 4.3v) | 伺服电压过低 | 检查伺服供电 |
| SERVOx_FUNCTION=y on disabled channel | 输出通道被禁用 | 检查 SERVO 配置 |
| SERVOx_MAX is less than SERVOx_TRIM | 伺服输出配置错误 | 调整参数 |
| SERVOx_MIN is greater than SERVOx_TRIM | 伺服输出配置错误 | 调整参数 |
| FETtec: Not initialised | FETtec 电调未初始化 | 检查配置与连接 |
| FETtec: x of y ESCs are not running | 部分电调未运行 | 检查电调与连接 |
| FETtec: x of y ESCs are not sending telem | 部分电调无回传 | 检查电调与连接 |
电池相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Battery failsafe | 电池保护触发 | 检查电池电压/容量 |
| Battery low voltage failsafe | 电压 < BATT_LOW_VOLT | 更换电池或调整参数 |
| Battery critical voltage failsafe | 电压 < BATT_CRT_VOLT | 更换电池或调整参数 |
| Battery low capacity failsafe | 容量 < BATT_LOW_MAH | 更换电池或调整参数 |
| Battery critical capacity failsafe | 容量 < BATT_CRT_MAH | 更换电池或调整参数 |
| Battery below minimum arming voltage | 电压 < BATT_ARM_VOLT | 更换电池或调整参数 |
| Battery below minimum arming capacity | 容量 < BATT_ARM_MAH | 更换电池或调整参数 |
| Battery unhealthy | 电池监视器无数据 | 检查连接与配置 |
| Battery voltage failsafe critical >= low | BATT_LOW_VOLT >= BATT_CRT_VOLT | 调整参数顺序 |
| Battery capacity failsafe critical >= low | BATT_LOW_MAH >= BATT_CRT_MAH | 调整参数顺序 |
地理围栏(Fence)相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Fence requires position | 启用围栏但无位置估计 | 等待 GPS 稳定 |
| FENCE_ALT_MAX < FENCE_ALT_MIN | 围栏高度配置错误 | 调整参数 |
| FENCE_MARGIN is less than FENCE_RADIUS | 围栏边距配置错误 | 调整参数 |
| FENCE_MARGIN too big | 边距大于高度范围 | 调整参数 |
| Fences enabled, but none selected | 启用围栏但未定义 | 定义围栏或禁用 |
| Fences invalid | 多边形围栏无效 | 检查是否有交叉线段 |
| vehicle outside fence | 飞行器在围栏外 | 移至围栏内 |
返航点(Rally)相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Can’t check rally without position | 无位置估计 | 等待 GPS |
| No sufficiently close rally point located | 返航点距离超过 RALLY_LIMIT_KM | 调整参数或添加更近的返航点 |
| No rally library present | 固件未包含返航点功能 | 重新编译固件 |
脚本(Scripting/Lua)相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Scripting: loaded CRC incorrect want: x | 脚本 CRC 错误 | 替换正确版本 |
| Scripting: running CRC incorrect want: x | 脚本 CRC 错误 | 替换正确版本 |
| Scripting: xxx failed to start | 脚本启动失败 | 检查内存或脚本 |
| Scripting: xxx out of memory | 脚本内存不足 | 增大 SCR_HEAP_SIZE |
DroneCAN 相关故障排查
| 消息 | 注释 | 解决办法 |
|---|---|---|
| DroneCAN: Duplicate Node x../y! | 节点ID重复 | 清除 DNS 或修改节点ID |
| DroneCAN: Failed to access storage! | 存储访问失败 | 重启飞控 |
| DroneCAN: Failed to add Node x! | 无法初始化节点 | 检查传感器连接 |
| DroneCAN: Node x unhealthy! | 节点无数据 | 检查连接与供电 |
其他系统故障排查
11.1 安全开关
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Safety Switch | 安全开关未按下 | 按下或禁用 BRD_SAFETY_DEFLT |
11.2 日志系统
| 消息 | 注释 | 解决办法 |
|---|---|---|
| Logging failed | 无法写入日志 | 未检测到SD卡,重新安装SD卡或者格式化 |
| Logging not started | 无法启动日志 | 未检测到SD卡,重新安装SD卡或者格式化 |
| Downloading logs | 日志下载中无法解锁 | 等待或取消下载 |
11.3 内存不足
| 消息 | 注释 | 解决办法 |
|---|---|---|
| ADSB out of memory | 内存不足 | 禁用功能 |
| Scripting: xxx out of memory | 脚本内存不足 | 禁用功能或更换飞控 |
| Terrain out of memory | 地形数据内存不足 | 禁用功能或更换飞控 |
11.4 系统初始化
| 消息 | 注释 | 解决办法 |
|---|---|---|
| System not Initialized | 系统仍在启动 | 等待 |
| temperature cal running | 温度校准中 | 等待 |
安全预检查(解锁检查)
[!Warning] 如果您不进行飞行,仅用于地面站设备测试或调试,可以禁用解锁检查。关闭解锁检查将会使系统跳过检查,可能会导致炸机。
可以在LGC地面站》无人机设置》安全设置》解锁检查进行配置:
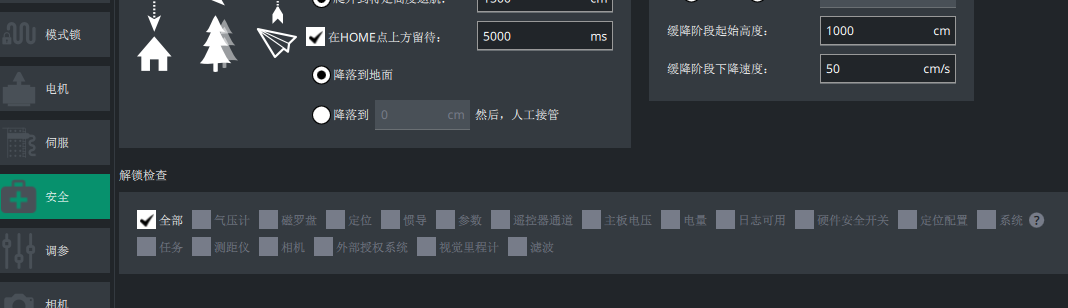
[!Warning] 去掉勾选全部可勾选需要检查的项,不勾选则为解锁不检查该项。也可以通过设置
ARMING_CHECK为非1的值选择检查项;设置为0,则为关闭所有解锁检查。