使用日志评估PID
PID调试时,只通过肉眼直观感受;有些时候难以辨别调试的方向和预估的值。可以通过日志分析工具,可以快速准确的评估;特别是使用PID评估工具。
[!TIP] 使用PID评估工具需要在配置日志记录中开启fast attitude和PID记录。
- 下载日志文件进行分析或者取下SD卡日志文件
- 打开PID评估工具
- 点击“选择文件”,找到对应的日志文件加载至PID评估工具
- AXIS中有横滚/俯仰/YAW的速率项和PID项,选择您想要查看的轴项。
- 评审工具的数据分为飞行数据、时域图、频域图、阶跃响应、PID频谱图。
- 评审时,我们主要参考阶跃响应、时域图、频域图。
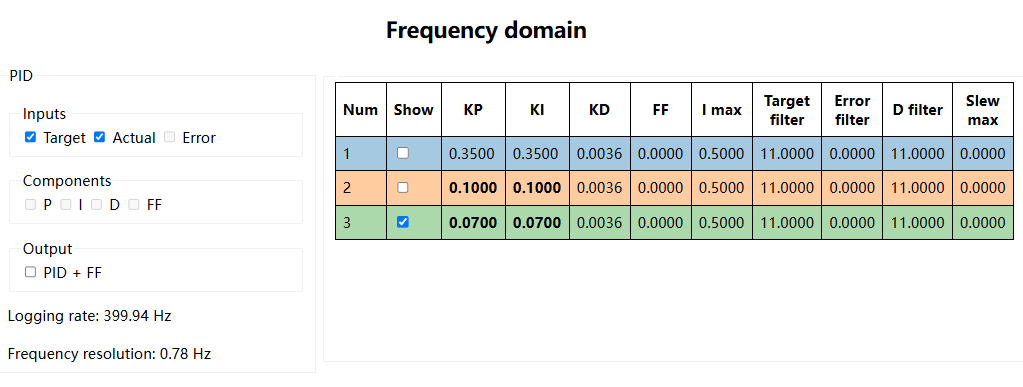
[!NOTE] 速率项的时域图中,仅有期望目标、实际值和输出图,比较纯净,可以比较直观的查看期望VS实际的响应。PID项具有完整的数据图,有误差、PID及FF数据。
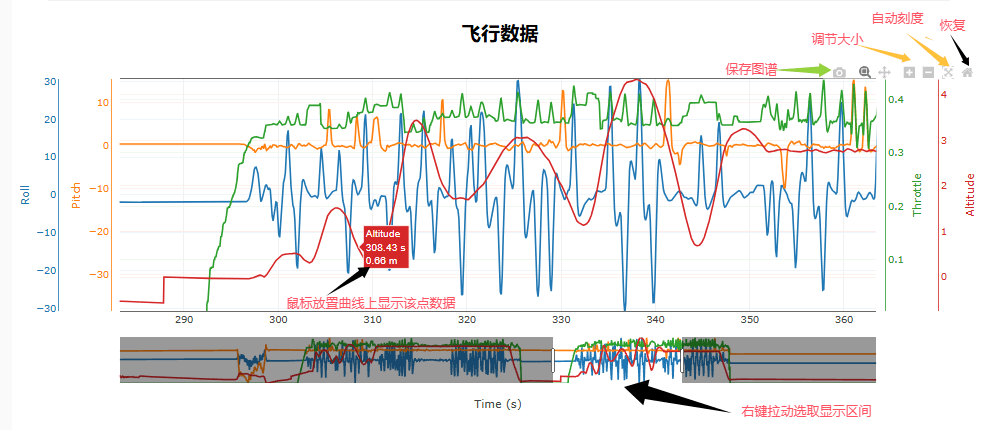
认识图谱工具
当您将鼠标放置在图谱中,将出现图谱工具,您可以使用工具保存图谱和调节刻度等;通过鼠标右键可以选取图谱显示的时间区间;通过自动刻度,可以调节到合适的刻度解决曲线显示溢出。
基于时域图评估
我们首先查看PID时域图;时域图显示了飞行器目标VS实际响应曲线;理想情况下,我们实际曲线应紧密跟随目标曲线。如下图所示:
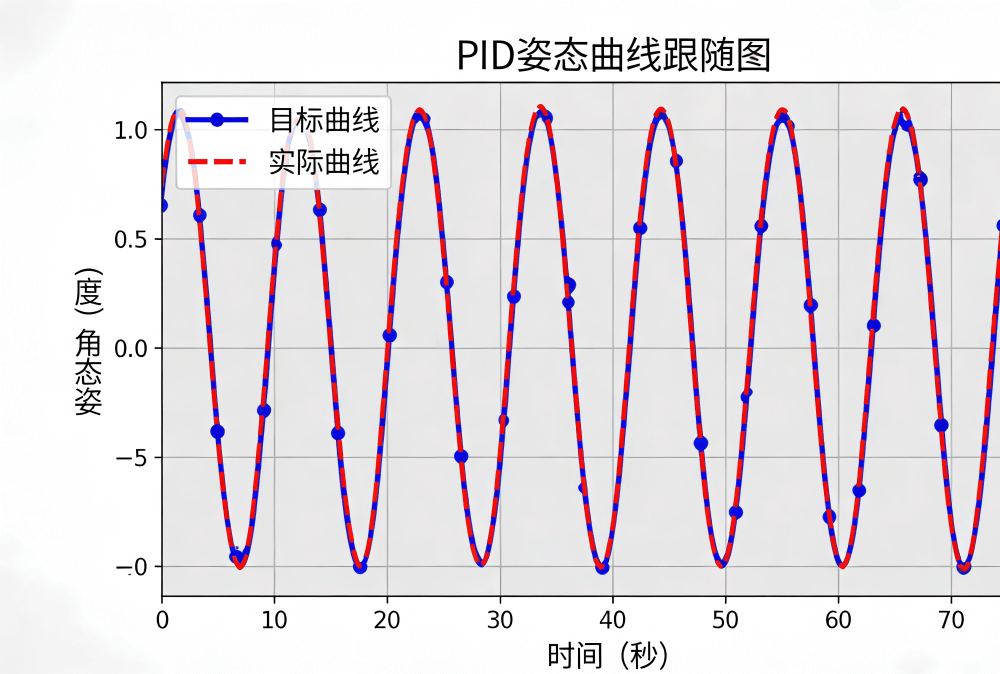
- 两者跟随越紧密则意味着PID比例越好;但实际飞行时因为振动和外部因素,我们总是不可能实现理想的效果;但我们期望两者的贴合得越紧密越好。
[!TIP] 正确的分析方法是依序分析横滚/俯仰、航向;三个轴都要进行分析;其中我们需要确立正常的调整比例原则:航向的I值约为速率P的1/10;横滚/俯仰的I值趋向于P值(一般为等于P值);分析办法一致,这里不单独指引。
基于阶跃响应图评估
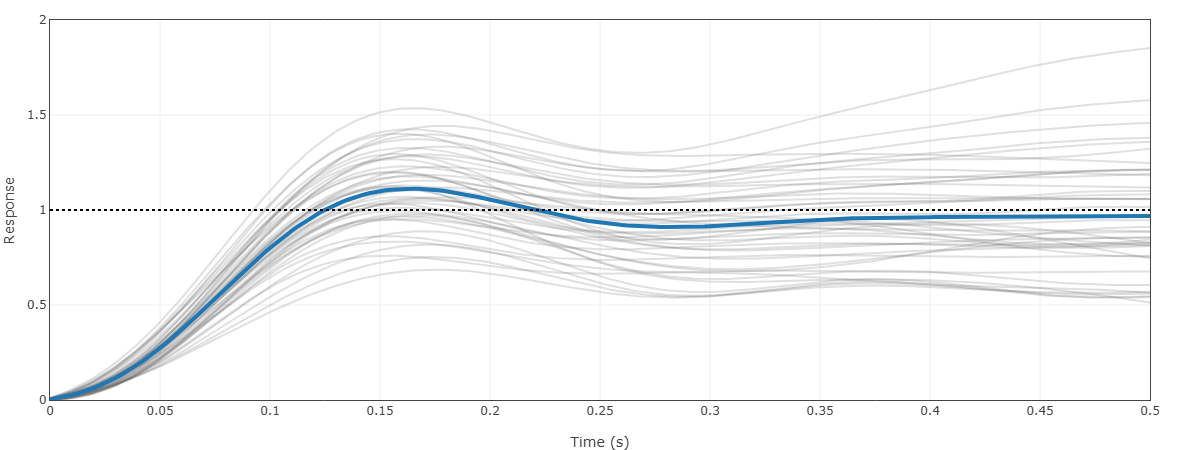
[!TIP] 上图蓝色曲线最终稳定在目标值 1.0 附近,稳态偏差极小,蓝色过冲在10%左右;说明该参数组的控制精度较好。这是一个动态响应快、稳态精度高、鲁棒性较好的状态。
阶跃响应:给系统一个 “突然、恒定” 的输入(阶跃信号),看系统输出随时间怎么变化,这个变化过程就是阶跃响应。 PID阶跃响应图可以显示飞行器的飞行姿态响应、曲线簇分布、动态特性、稳态表现 核心元素识别:
- 蓝色曲线:基准响应曲线(单组固定参数下的阶跃响应);典型表现:在越短的时间内达到阶跃目标值,则代表响应越快;0.08~0.15s之间为优;越平稳说明姿态越稳定;整体低于1为P过小、稳态误差能力弱;峰值高于1,有过冲;弯曲则意味着存在振荡,需要增加阻尼D。
- 灰色曲线簇:蒙特卡洛仿真结果(多组参数 / 扰动下的响应集合),曲线越集中说明系统稳定性越高,PID的匹配度越好。
- 黑色虚线:阶跃目标值(1.0)(系统最终需收敛的稳态值)。
速率P过小在图谱中怎么表现?
从时域图谱看:
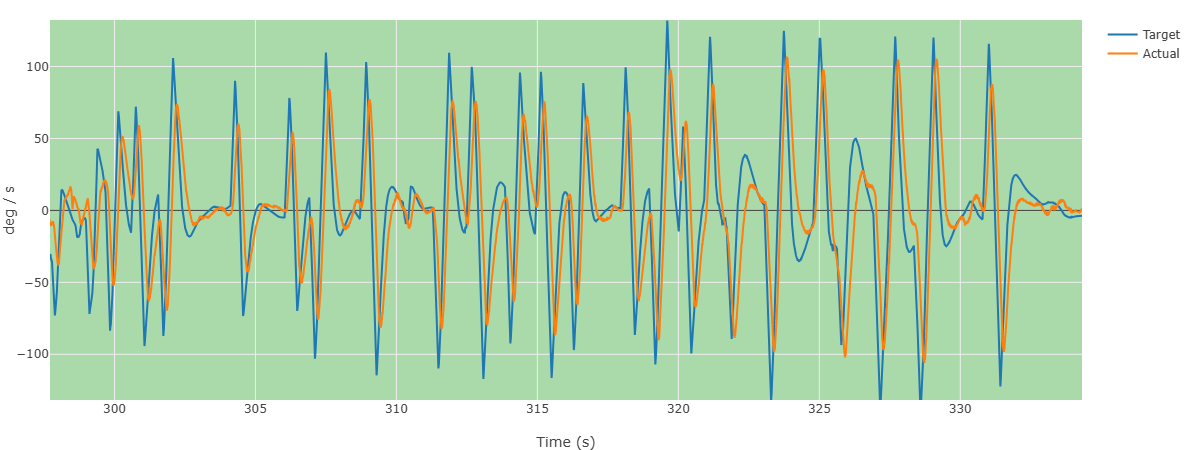
目标姿态始终大于实际姿态,这说明P值过小,控制器的纠正力度太弱,无法快速跟上目标的姿态变化。
从阶跃响应图验证
绿色的基准参考线始终未达到目标值1.0,随着时间缓慢接近于1.0目标,说明了系统对误差修正慢,响应度低,P值与I值存在过小的情况。较为合适的响应为在0.08~0.15s时间区间提升至目标响应曲线(黑色1.0直线)。
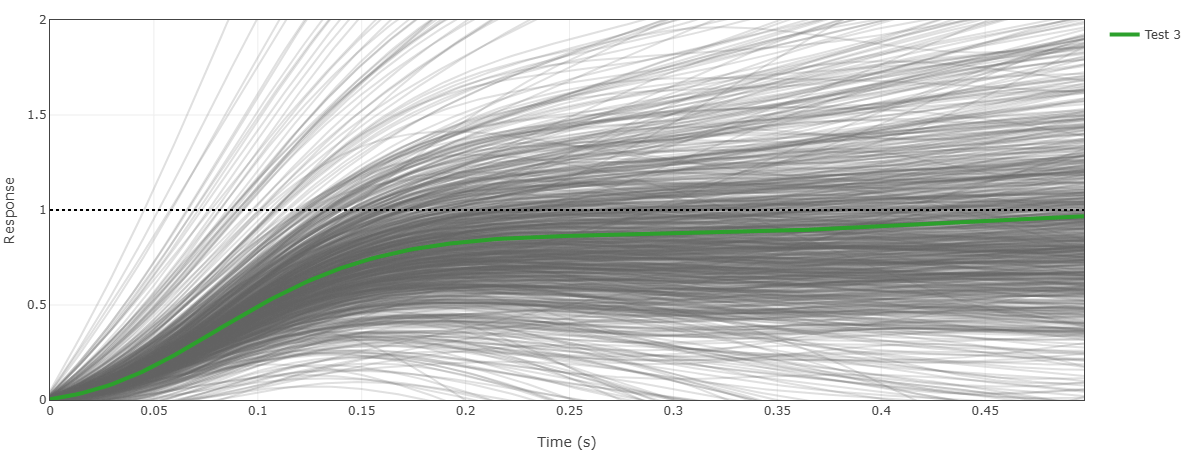
该图显示我们以50~60%的调整幅度增加P与I值(时间轴0.1s时的响应幅值约为0.5,说明P值低了50%);
我们在频域图查看当前飞行器使用的P与I值为0.07;我们根据阶跃响应图可以预估该飞行器该轴的P与I值约为0.14。
- 我们以相同的分析方法分析另外两个轴,然后将预估值修改后,再次飞行记录日志进行分析。
速率P过高或D值过低在图谱中怎么表现?
从时域图谱看:
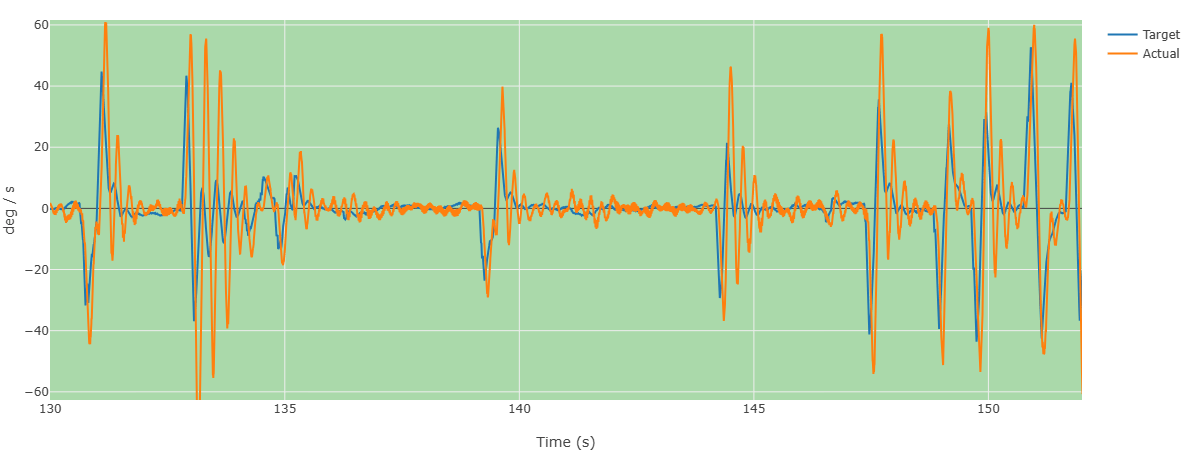
- 姿态角度上,实际曲线在0轴附近振动,这说明P值相对于D值过大,控制器的纠正力度太强,产生了0轴时的振动。需要降低P值。
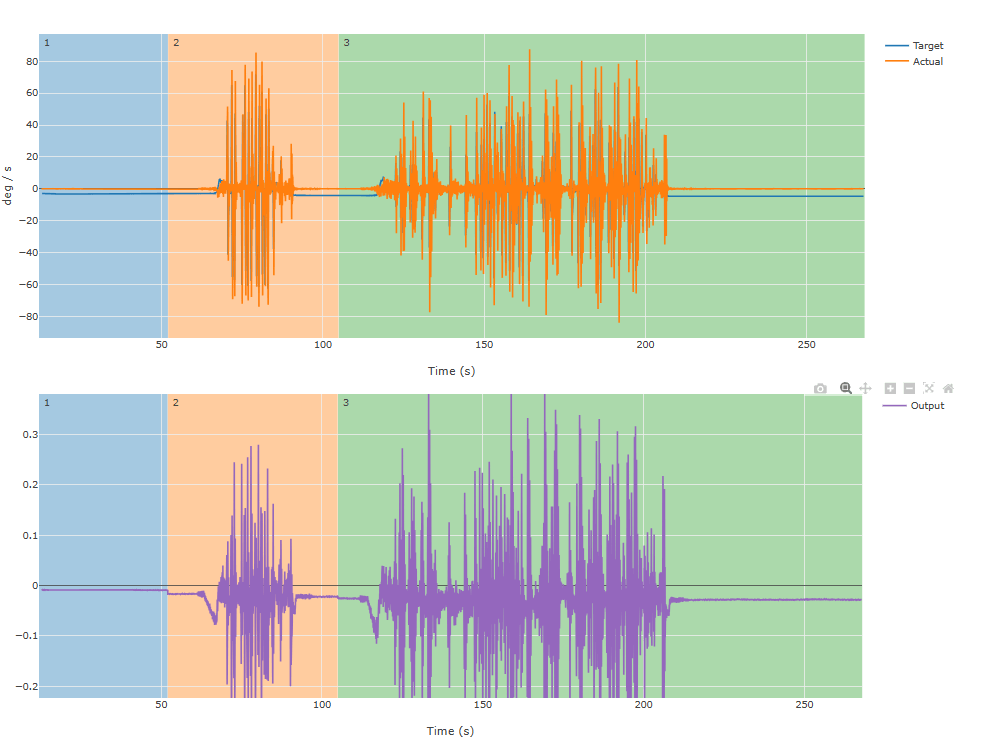
- 输出与实际姿态出现同周期振荡,这说明P值相对于D值过大,产生了过激振荡。
从阶跃响应图验证
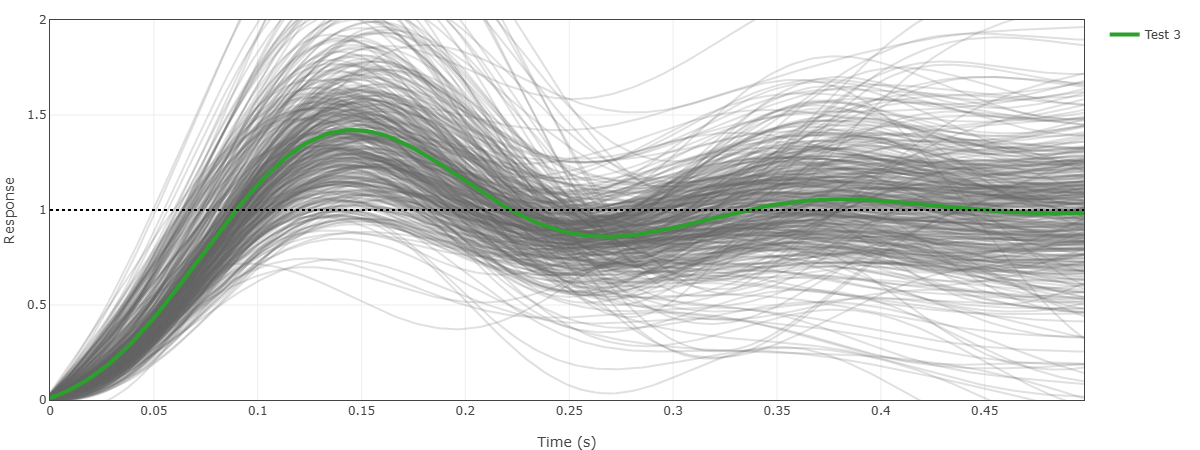
从阶跃响应图可见,绿色基准参考线越过目标值1.0到达1.4左右,在0.25s左右触底;说明飞行响应存在过冲振荡;且灰色曲线簇较为发散,说明PID响应稳定性较差;从图中可知该飞行超调量较大(峰值在1.4左右,超调约40%)。
该飞行日志显示超调量大(峰值约 1.4,超调约 40%),可以减小40%的P增益或增加D增益。
注意事项
- 轴间串扰会影响调参分析的准确性;对于对称布局的飞行器,可以锁定横滚与俯仰,达到稳定效果后再进行精细调整。
- 日志分析主要定位调参的方向和预估值;需要多次反复飞行验证才能获得较好的效果。
- 为了更好的抗风和带载性能,带有一定的超调量较为理想(约10%)。
- PID评估工具尚待完善中,有一些BUG,可作为参考。