ArduPilt使用指南
ArduPilot具有完善的教程体系,可以通过ArduPilot WIFI获得最新最完善的设置教程。
[!NOTE] 新手入门先阅读硬件连接及系统组成章节,组装好飞行器。
CUAV基于Ardupilot WIKI进行了翻译并添加了部分内容:
地面站
ArduPilot飞行栈推荐使用LGC地面站对多系统兼容尤其是安卓系统兼容更好;并且具有美观简介的界面和丰富的功能;也可以使用MissionPlanner地面站。
[!NOTE] LGC地面站具有美观简洁的界面和安卓版本兼容并且兼容PX4固件,非常适合终端用户和商业机构。Mission planner不支持PX4,安卓版本兼容性不是很好,但是调试和配置丰富,适合无人系统调试人员。
加载ArduPilot固件
[!NOTE] 加载固件的有在线烧录和本地烧录方法;如果在线加载固件缓慢,建议先将日志文件下载到本地,然后再进行本地加载。
在线加载
运行LGC地面站>点击LGC图标》无人机设置》固件》通过USB将设备连接至电脑》选择需要烧录的固件类型。
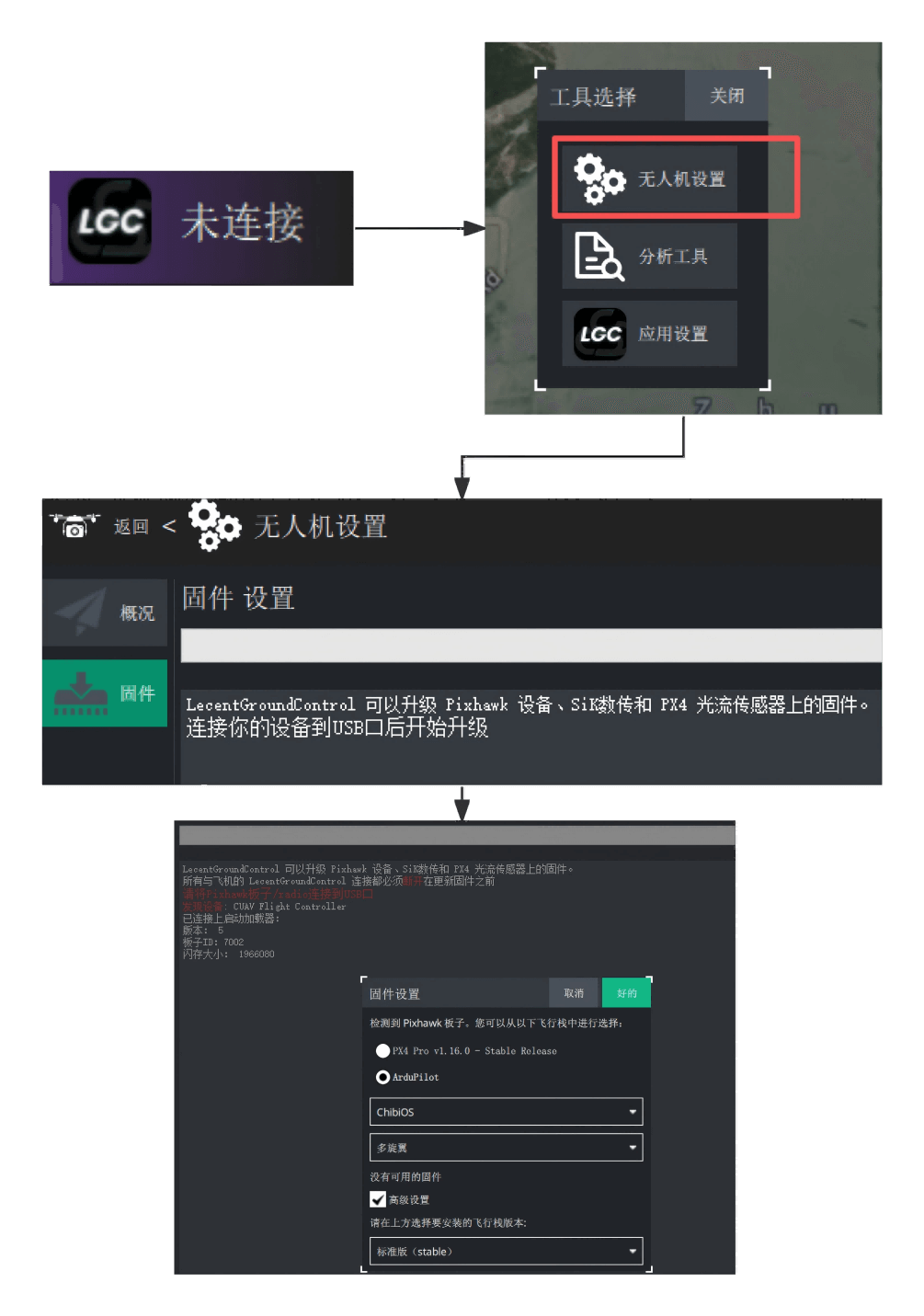
[!TIP] ArduPilot固件采用chbios系统,固件类型有多旋翼/直升机/固定翼/无人车/水下装置;版本号4.Y.XX(Y为大版本更新会新增一些功能,XX为细分版本号,细分版本号越大的一般稳定性越好。勾选高级设置可选固件版本类型(稳定(标准)版、测试(bate/预发布)版、开发者编译(每日更新)版、自定义固件。
本地加载
将固件下载到本地电脑后,在LGC地面站的固件界面》通过USB将设备连接至电脑》勾选高级设置》自定义固件...》选择固件文件进行固件写入。
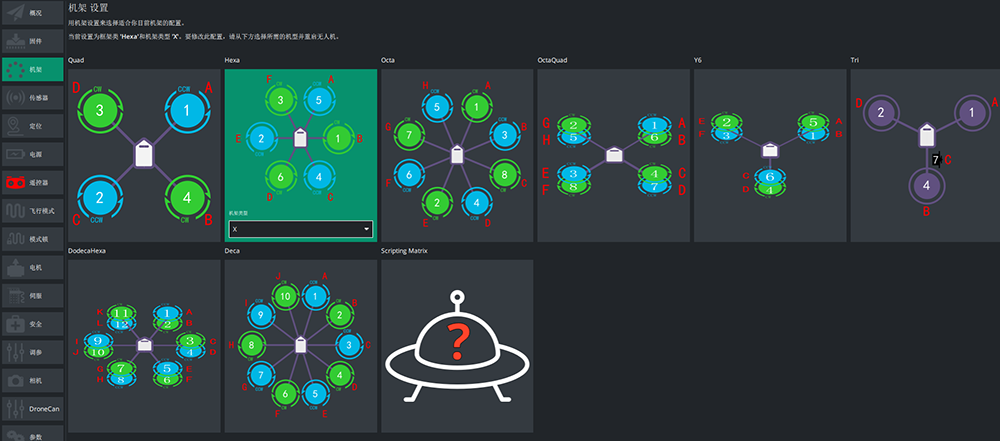
机架类型和电机序号布局
打开LGC无人机设置界面》机架进行机架类型设置