多旋翼无人机组装
本文以组装一台4kg的四旋翼无人机为例,简述多旋翼的组装。
[!Tip] 四旋翼(四轴)无人机是用四个旋翼(四个动力轴)产生升力的多轴飞行器,是直升机的一种。
硬件准备(部分机型核心组件)
| 机型 | 轴距/载重 | 核心配置清单(标准数量) | 适用场景 |
|---|---|---|---|
| DJI F450 | 450mm | 7-nano/其它控制器*1 NEO 系列定位模块*1 2212(980KV)电机*4 30A 电调*4 1045 螺旋桨*2 对 3S(12000mAh)电池*1 分电板*1 线材*N |
入门练习、轻量航拍 |
| 迅翼2 | 680mm | Pixhawk V6X/其它控制器*1 GPS 定位模块*1 3510(360KV)电机*4 40A 电调*4 16 寸螺旋桨*2 对 6S(12000mAh)电池*1 分电板*1 线材*N |
航测、中短距巡检 |
| 三类六旋翼(小型) | 小型 | X7+ 控制器*1 CAN PDB/CAN PMU 电源模块*1 GPS 定位模块*1 5008(360KV)电机*6 40A/60A 电调*6 16 寸螺旋桨*3 对 12S(20000mAh)电池*2 |
培训教育 |
| 四类六旋翼(中型) | 中型 | X25 EVO 控制器*1 CAN PMU 2lite 电源模块*1 C-RTK2 HP 定位模块*1 T-motor A8 动力套/好盈 X8 动力套*6 12S(25000mAh)电池*2 |
培训教育、物流运输 |
| 100KG 四旋翼 | 载重 100kg | X25 EVO 控制器*1 C-RTK2 HP 定位模块*1 好盈 X13 动力套*4 18S DroneCan 智能电池*2 |
农业植保、吊运 |
| 200kg 四旋翼 | 载重 200kg | X25 EVO 控制器*1 C-RTK2 HP 定位模块*1 好盈 X13 动力套*4 18S DroneCan 智能电池*2 |
重型载荷、特种作业 |
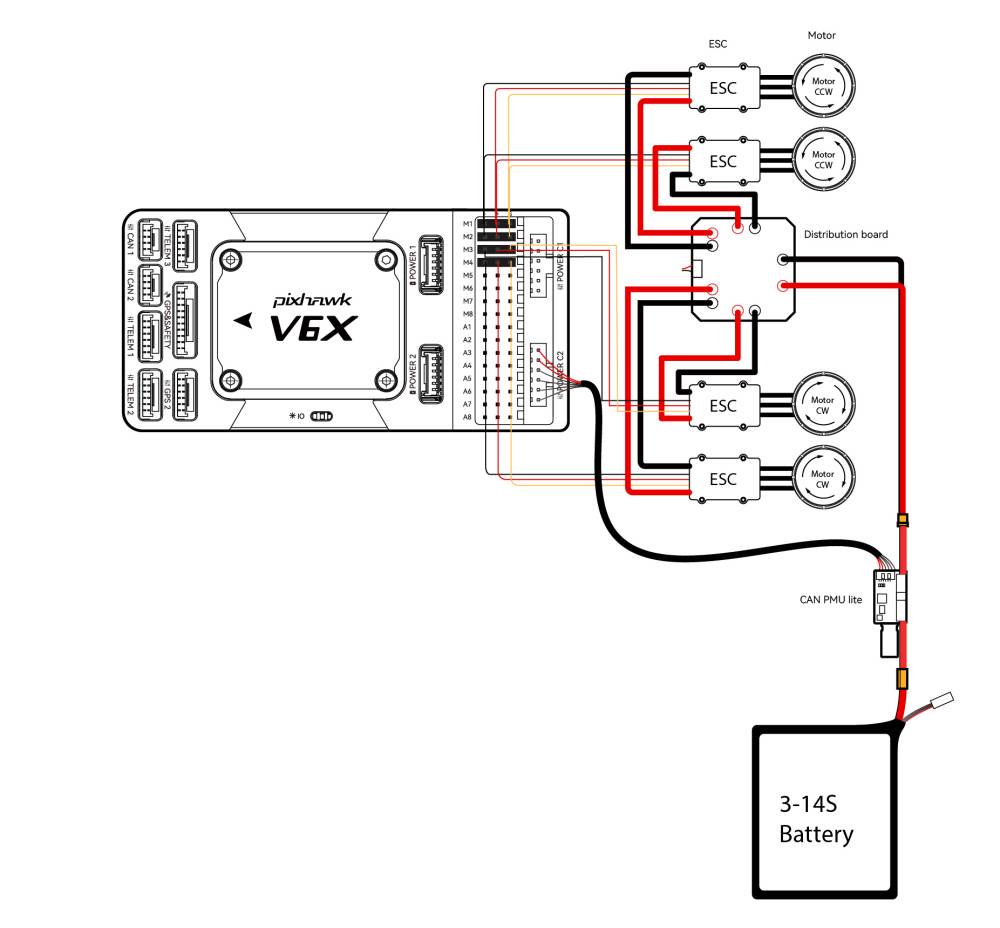
系统连接示意图
更多各型号控制器配件连接图请查看控制器》快速布线。
遥控器接收机及数传连接示意
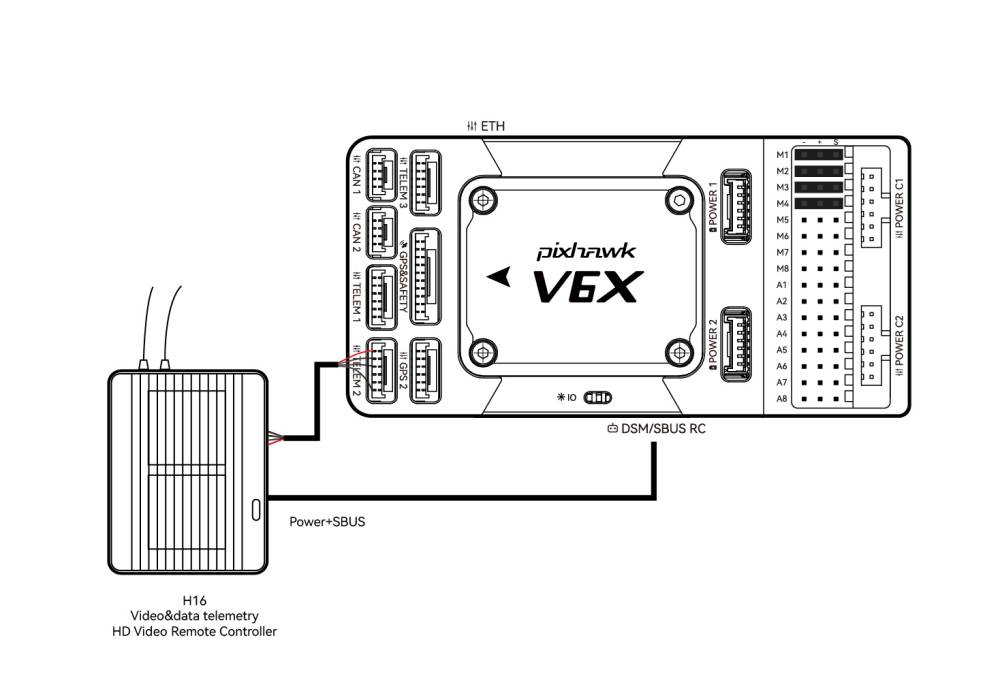
[!NOTE] TELEM1/2接口连接数传,SBUS/DSM/PPM接口连接遥控器接收机,示意图为数控一体机。
电机转向机安装位置
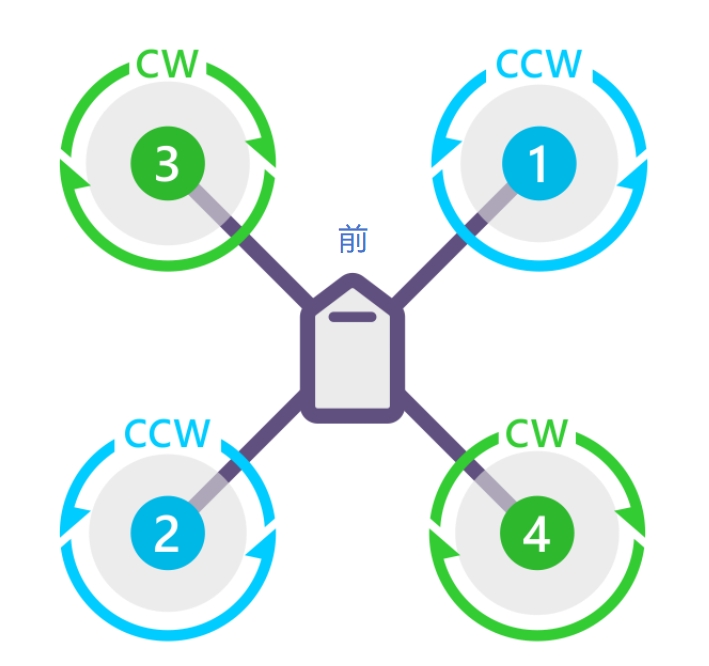
[!NOTE] 完整的各机型布局和硬件连接访问ArduPilot]机架类型和电机序号布局。
系统总图
最终效果
