测绘相机设置
ArduPilot允许你配置伺服输出或继电器,通过遥控器、地面站或在任务执行过程中控制相机快门。
[!NOTE] 测绘相机具有不同的兼容协议,配置前请向供应商确认相机支持MAVLINK;以赛尔102S五目相机为例,具有支持MAVLINK的独立固件。
硬件连接
我们以赛尔102S五目相机连接至控制器为例。
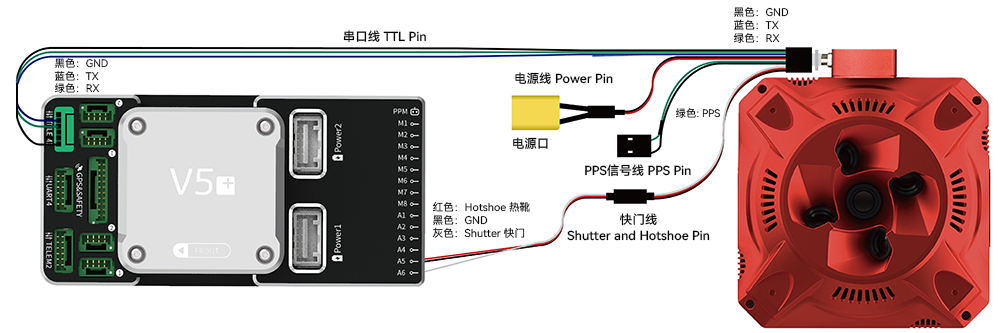
| 控制器接口 | 控制器引脚 | 对接相机接口 |
|---|---|---|
| TELEM1/TELEM2/UART4 | GND | GND |
| RTS | - | |
| CTS | - | |
| RX | TX | |
| TX | RX | |
| 5V+ | - | |
| Servo | A6(s+) | 快门 |
| A5(S+) | 热靴 | |
| GND | GND |
启用MAVlink通信
在控制器全部参数表中,设置以下参数:
以连接至TELEM1为例
Serial1_baud=256
Serial1_protocol=2
以连接至UART4为例
Serial4_baud=256
Serial4_protocol=2
设置快门触发
以下两者触发方式选一:
使用PWM触发相机
CAM1_TRIGG_TYPE=0 //此参数为设置触发形式,0为PWM触发,1为继电器触发
Servo14_Function=10 //设置A6/M14为快门触发,根据实际通道设置
CAM_FEEDBACK_PIN=54 //设置通道A5/M13为热靴反馈通道,根据实际通道设置
CAM_TRIGG_DIST=0 //关闭GPS偏移拍照
CAM_AUTO_ONLY=1 //什么时候可做距离触发,必须为1为在自动模式下才会触发
RC?_OPT=9 //遥控器控制相机触发的通道,如想设置遥控器7通道则设置RC7_OPT=9,遥控器7打到高位就会触发拍照)
Serial1_baud=256 //设置串口波特率为256(赛尔102s默认
Serial1_protocol=2 //设置串口协议为MAVLINK;实现相机获取飞控GPS数据(如果相机支持)
使用继电器触发相机
CAM_TRIGG_TYPE=1 //此参数为设置触发形式,0为PWM触发,1为继电器触发
CAM_RELAY_ON=1 //继电器触发是什么电平,0=低电平,1=高电平,赛尔102S使用高电平触发
Relay_pin=55 //继电器触发通道;55对应A6/M14引脚;可以使用其它引脚;查看引脚映射
Servo14_Function=-1 //此参数为设置触发通道为控制器M14/A6通道,-1为继电器相机触发
CAM1_FEEDBACK_PIN=54 //此参数为设置热靴反馈通道,54为控制器M13/A5通道
CAM1_TRIGG_DIST=0 //此参数为GPS偏移触发拍照,必须为0,不然GPS产生偏移就会触发
CAM1_AUTO_ONLY=1 //此参数为什么时候可做距离触发,必须为1为在自动模式下才会触发
CAM1_DURATION=1 //快门开启时间,1为100ms
测试
可使用两种方式可测试快门触发
使用遥控器触发
RC?_OPTION=9 //?=遥控器快门触发通道,例如RC7_OPTION=9则遥控器通道7;设置后波动摇杆即可触发。
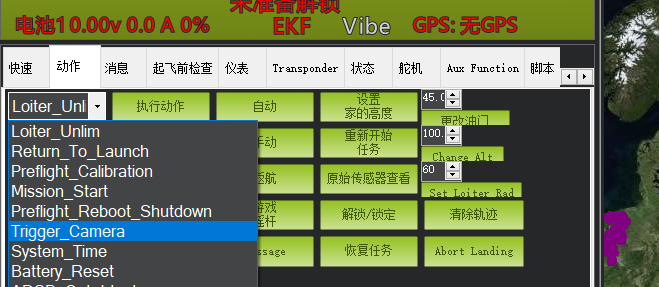
使用地面站触发
在地面站的飞行数据的动作栏,选择Trigger_camera,点执行动作就可以触发拍照。