快速自动PID调整
当您无法通过上述的说明获取到想要的控制效果时,可以尝试快速自动调参。
[!Warning] 快速自动调参存在极小概率的获取错误PID的概率,对于高价值的飞机不建议操作。
快速自动调参
[!Tip] 在运行快速自动调参前,请确保已完成调参前配置并且飞行器已具备基本的稳定飞行与悬停能力。
快速自动调参系统将会在飞行时尝试匹配这些参数:
ATC_RAT_RLL_P
ATC_RAT_RLL_I
ATC_RAT_RLL_D
ATC_RAT_PIT_P
ATC_RAT_PIT_I
ATC_RAT_PIT_D
ATC_RAT_YAW_P
ATC_RAT_YAW_I
ATC_RAT_YAW_D
[!Tip] 与AutoTune相比,QuikTune的优势在于更安全,因为飞机无需移动或抖动。其缺点是,QuikTune无法找到车辆的最大旋转加速度(使用调参前配置匹配就可以)。
运行脚本
- 设置
SCR_ENABLE = 1(启用scripting,并重启控制器) - 下载VTOL-quicktune.lua脚本到电脑
- 将脚本复制到您的控制器SD卡的APM/scripts目录中
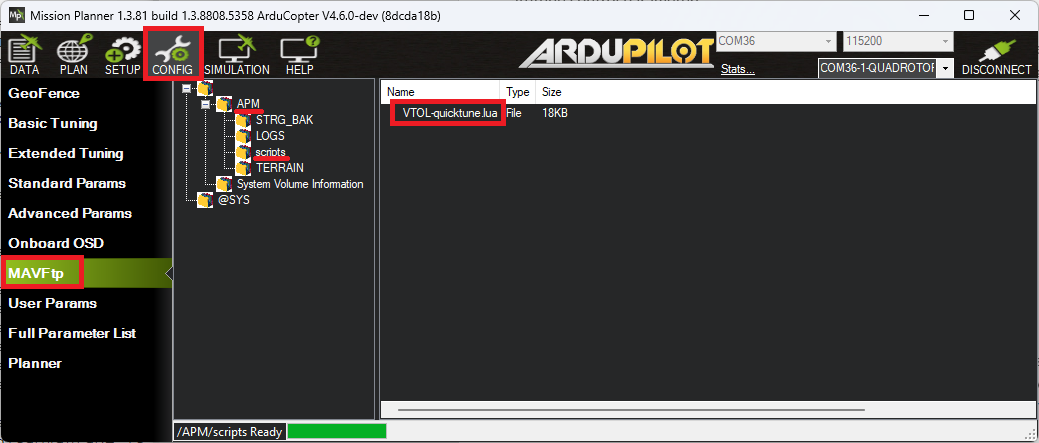
- 重启控制器并设置参数
QUIK_ENABLE = 1 - 在遥控器上找一个三档开关,设置
RCx_OPTION=300(X为通道号)
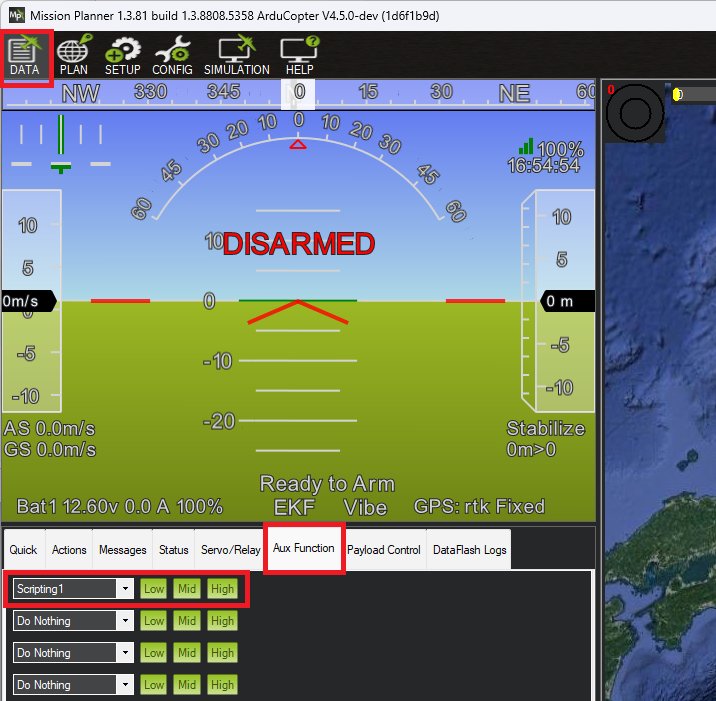
[!Tip] 可以将MP地面站的
Aux Function设置为“Scripting1”,代替遥控器开关。
开始调参
- 找一个具有无风的晴朗天气并对空环境良好的开阔区域
- 连接地面站并打开消息栏,用于显示调参过程的提示信息
- 将遥控器通道开关拨到低档位置或者“Scripting1”选项卡的低按钮
- 在Loiter(悬停)模式起飞,爬升至3米左右的高度
- 将遥控器通道开关拨到中位,或者“Scripting1”选项卡的中按钮
- 可以中途通过遥控器纠正飞行器位置,这会暂停调参过程,当您不再控制飞机后,调参将会恢复。
[!Tip] 如发生剧烈摆动,将遥控器通道开关拨到低档位置,或者“Scripting1”选项卡的低按钮取消调参,并根据<速率PID值调整指引>进行手动调参。
- 当消息提示调参完成后,将遥控器通道开关波动到高位或者“Scripting1”选项卡的高按钮 来保存调参结果。
- 降落并并上锁。
自定义配置
该脚本的相关自定义参数,可对快速调参特性进行配置。