传感器校准
在ArduPilot系统中,加速度计和罗盘校准是不要的。
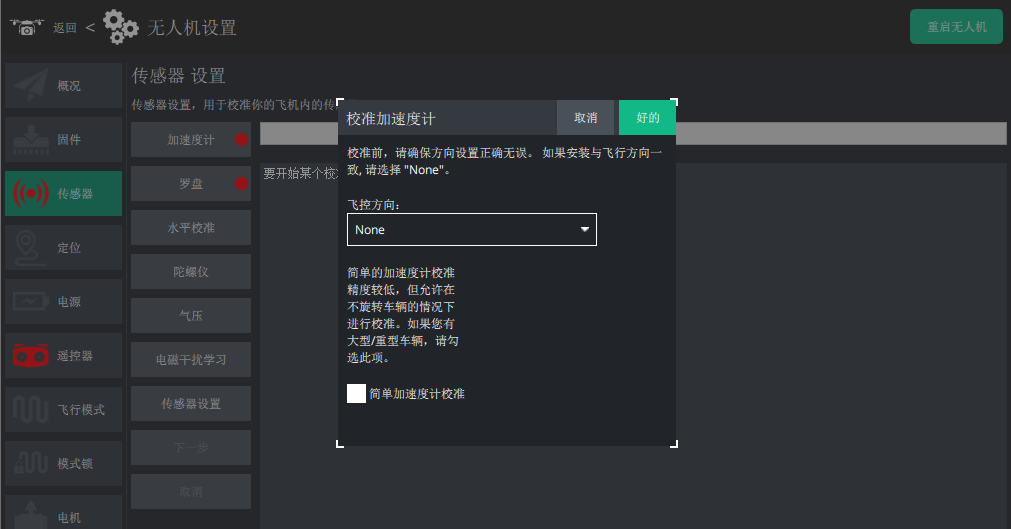
加速计校准
[!TIP] 如果飞控采用非标准(即箭头未指向机体前方)安装方向,则在进行加速度计校准之前,请确保正确设置了AHRS_ORIENTATION。
- 连接控制器进入无人机设置》传感器》加速度计。
- 将飞机正面朝上平方至水平面,等下方图标变成黄色框,点击下一步。
- 按照系统图片提示,依次按往左、右、下、上、背部平放。
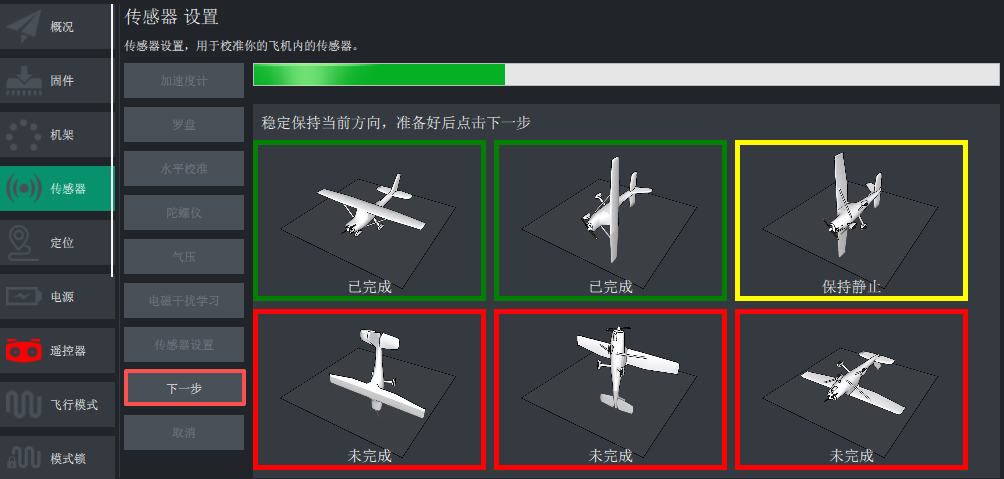
- 校准完成后,在提示框中点击‘重启飞行器’。
[!NOTE] 示意图外框颜色:绿色为已完成该面姿态校准,黄色为已识别控制器为当前姿态;需要等待人工点击下一步确认;红色为尚未完成或开始执行。
罗盘校准
- 打开无人机设置》传感器》罗盘页面
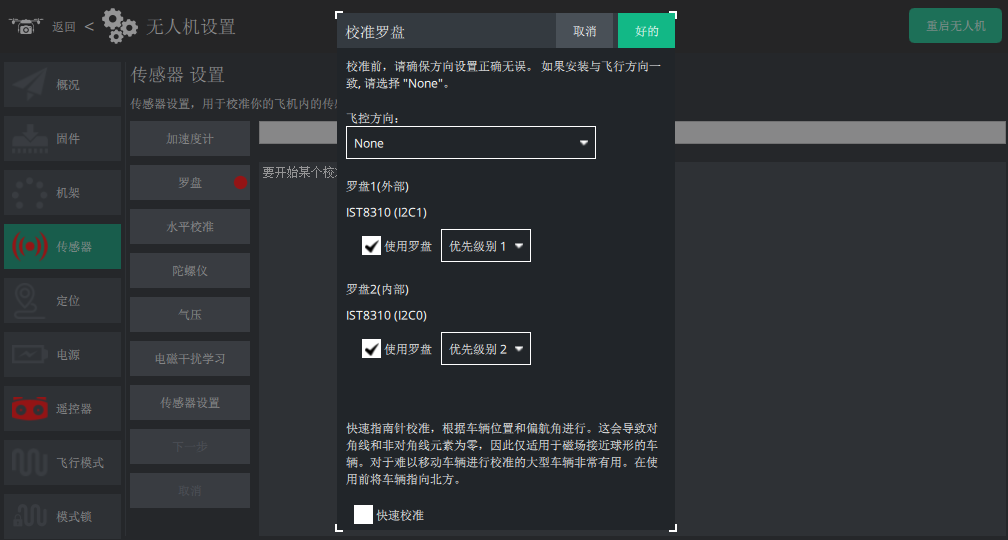
- 可以根据需求设置飞控安装方向和罗盘优先级(一般默认);点击“好的”开始进行旋转720度校准
- 将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下指向地球旋转几秒钟
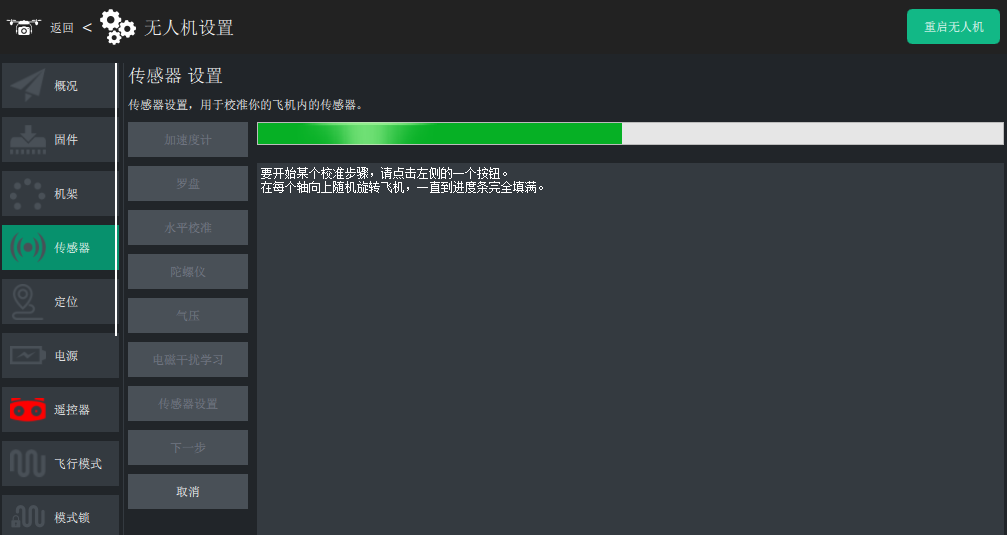
上部绿色指示条向右右延伸得越来越远,直到校准完成。
可以根据需求勾选去掉不需要或者状态不佳的罗盘。
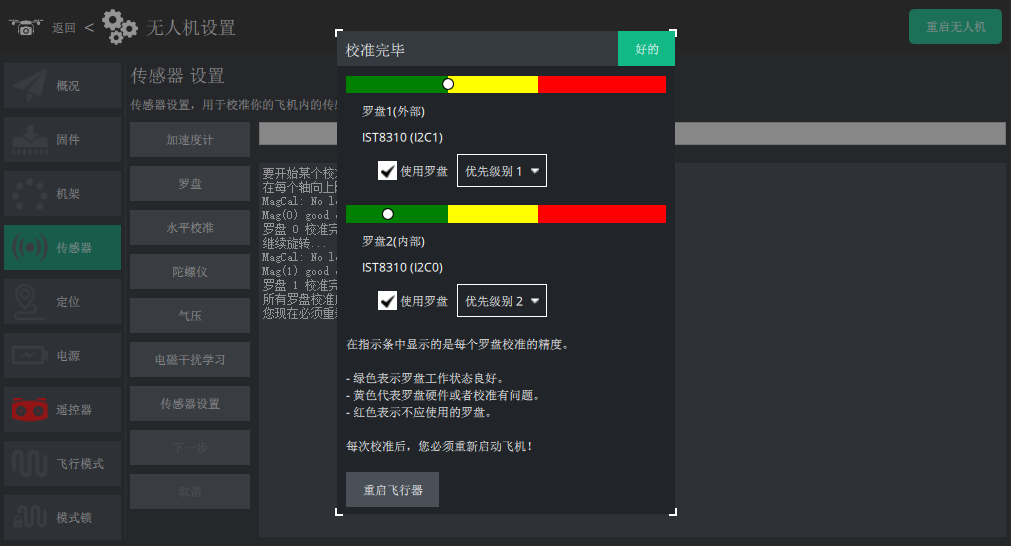
[!TIP] 在校准完毕提示窗中包含有绿、黄、红三色罗盘校准偏移状态指示条。红色为不健康,绿色为数值偏大。一般应处于绿色状态条。
水平校准
为了在飞行时,尽可能的减轻飞机在非GPS飞行过程中,持续的位置偏移;往往需要精准的水平位置校准。
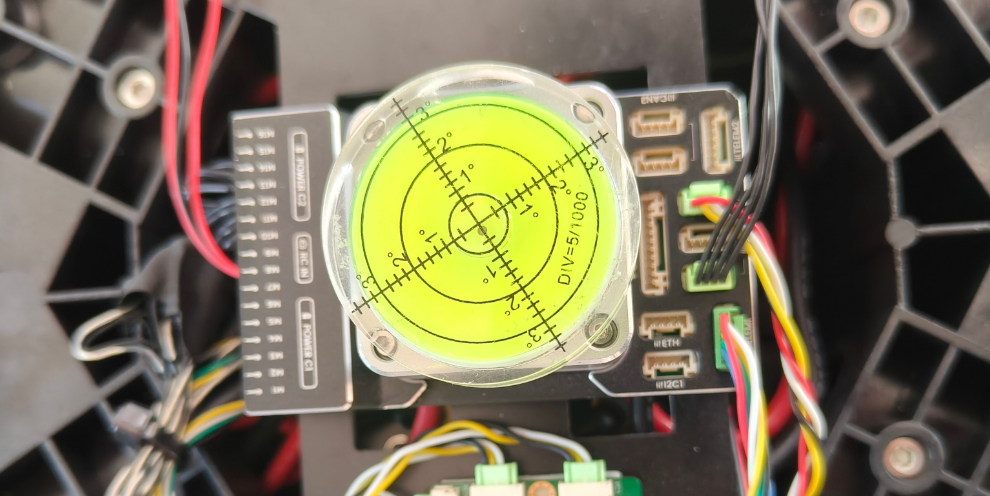
将水平球放置在与飞控IMU平行的水平面;通过调整(往往通过垫高使其平衡)飞机放置的水平姿态;使水平球气泡与中部圆形标尺重叠,则为飞机处于水平面状态。
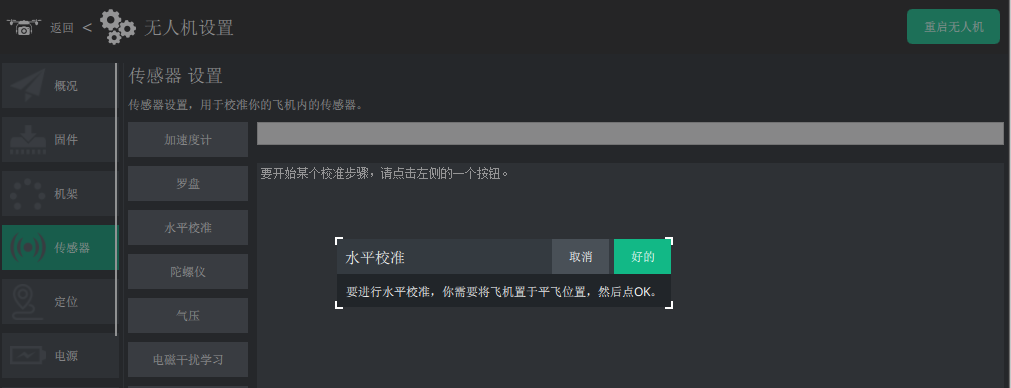
打开无人机设置》传感器》水平校准界面
- 在提示框中点击“好的”确认开始执行校准
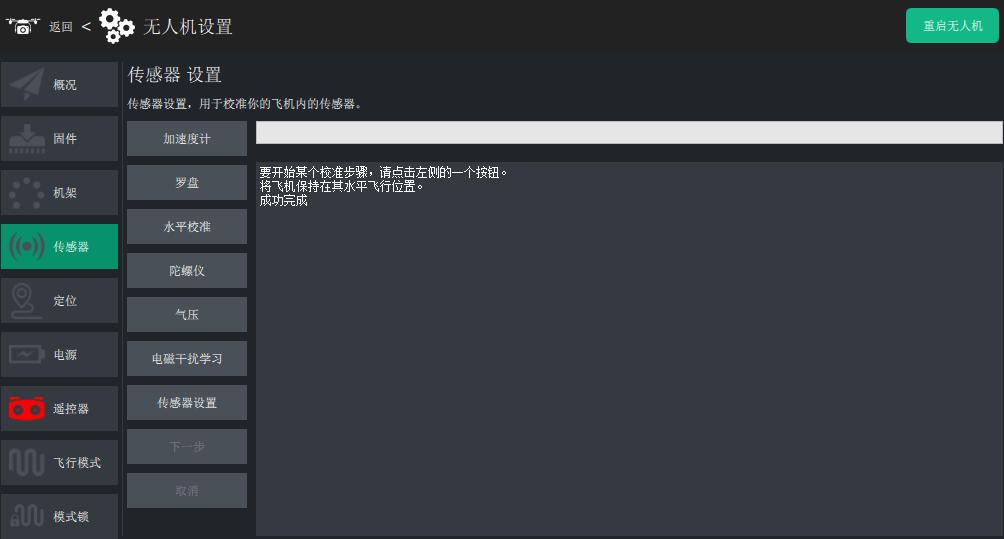
- 完成校准程序
陀螺仪校准
[!TIP] 对于陀螺仪传感器,arduPilot固件会在运行时会自动执行对准程序,一般情况下不需要执行校准。当系统提示或者数据偏移时,可执行下方程序进行校准。
- 打开无人机设置》传感器》陀螺仪
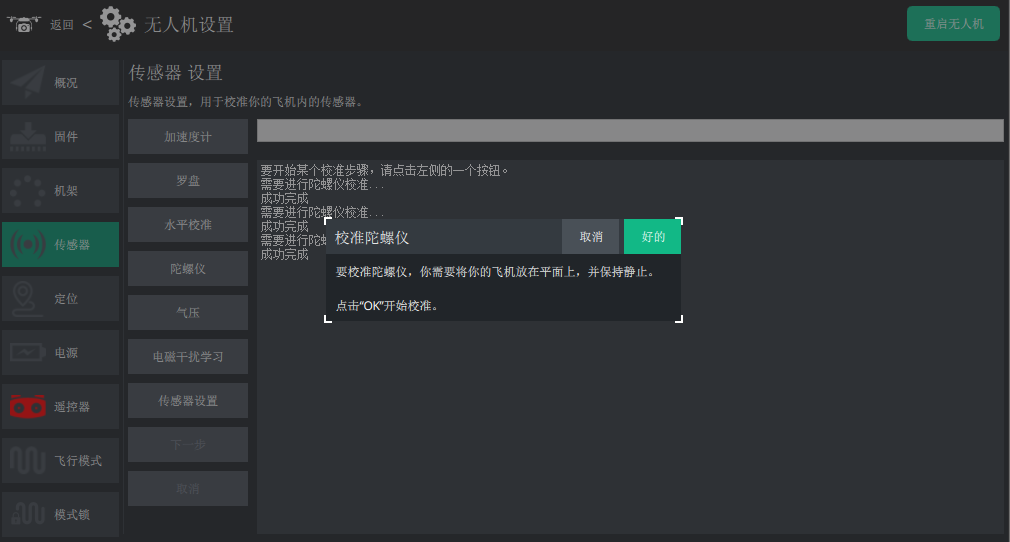
- 将控制器水平放置并静止后点击提示框"好的“,开始执行校准。
[!NOTE] LGC地面站中的气压校准、电磁干扰学习和传感器设置不需要进行操作。对于固定翼和垂直起降固定翼还需要校准空速传感器。