首次飞行须知
[!Warning] 首次飞行对于飞机来说时最危险的时刻,并不像调整好的飞机一样稳定可靠,可能随时发生炸机或者失控务必保持敬畏严谨态度;请务必在满足以下条件下执行飞行:
调参前设置
LGC地面站具有智能化初始调参匹配AI模型,可以根据您的飞机规格智能匹配适应您飞机的初始参数;这些参数将影响您调参的效率。
[!TIP] 在进行初始调参前,您需要先设置完成电机行程设置;这将确保飞机运行时不会进入电机运行死区,防止姿态失控。
飞行器动力配置
飞行器的动力配置与PID等参数紧密关联;输入飞行器配置信息系统将为您自动生产适应您的飞行器的默认配置;务必基于默认配置的基础上再进行细致的参数调整。
- 连接LGC地面站,并进入无人机设置》调参界面

| 参数名称 | 说明 | 备注 |
|---|---|---|
| 电池节数(S) | 飞行器使用的电池由多少节电芯串联组成 | 一般在电池标签上标注;多电池串联时节数相加 |
| 单节电池最高电压(V) | 单片电芯的满电电压 | 常见值:4.25 / 4.35 / 4.45V;用于计算电池组满电电压;MOT_BAT_VOLT_MAX |
| 动力系统类型 | 飞行器使用的电机与电调配置 | 用于匹配 MOT_THST_HOVER;值过低会导致刹车时姿态失控;值过高会导致高速时异常 |
| 螺旋桨长度(英寸) | 螺旋桨的尺寸长度 | 根据尺寸匹配飞控模型,并计算加速计和陀螺仪截止频率 |
| 单节电池最低电压(V) | 单片电芯的最低安全电压 | 常见值:3.5 / 3.3V;用于计算电池组最低电压;与低压保护机制相关 |
- 配置完成后,点击“计算参数”,系统弹出根据模型生成的默认参数。

-可根据需求选择需要写入的参数;点击“写入参数”,参数将写入控制器。
配置日志记录
[!Warning] 首飞的主要任务检验飞行状态采集飞行数据;用于优化飞行的调优和故障分析;配置在日志中存储完善的飞行数据非常重要。
对于配备性能较弱的F4处理器、小型螺旋桨、低速microSD卡的设备,或单纯无法进行陀螺仪原始日志记录的设备,建议采用批量日志记录:
INS_LOG_BAT_MASK=1
INS_LOG_BAT_OPT=4
INS_RAW_LOG_OPT=0
LOG_BITMASK=180223 //勾选fast attitude和PID
对于配备F7或H7处理器、大螺旋桨、高速microSD卡的车辆,且支持陀螺仪原始数据记录的,建议启用陀螺仪原始数据记录:
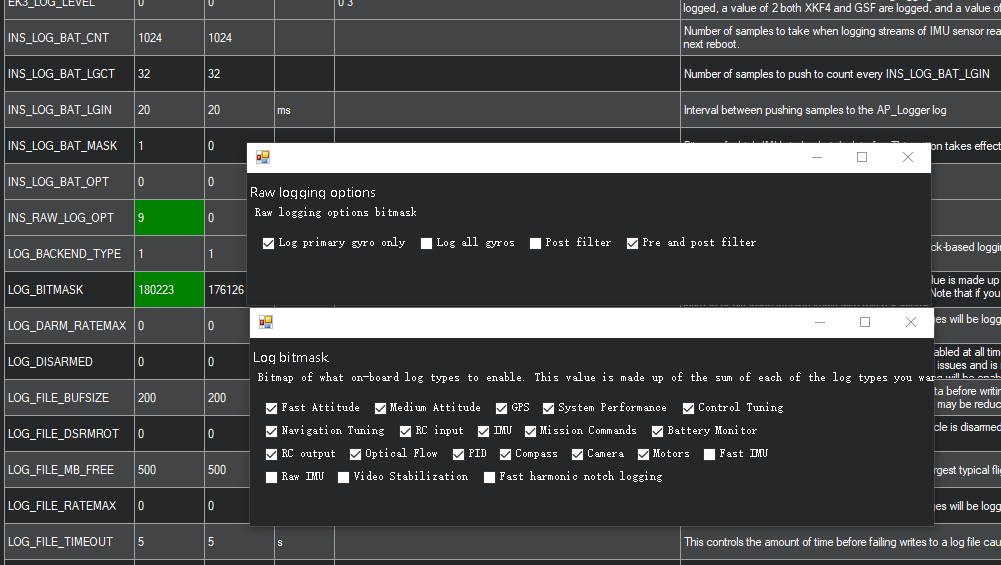
INS_LOG_BAT_MASK=1
INS_LOG_BAT_OPT=0
INS_RAW_LOG_OPT=9 //开启记录滤波前和滤波后、主gyro的日志用于记录陷波滤波器
LOG_BITMASK=180223 //勾选fast attitude和PID;用于PID评估
安全开关与GPS
安全开关一般集成于GPS模块上;用于防止误操作解锁而造成人身伤害;只有长按下GPS上的Safety开关至LED常亮;才能解锁电机。如果您充足的经验并能确保不会误操作,则可以设置以下参数禁用它:
BRD_SAFETY_DEFLT=0
[!NOTE] 您也可以通过LGC地面站中的GPS配置界面配置它。
根据飞行器规格修改初始飞行参数
[!NOTE] 默认PID适合多数轻小型无人机,对于微型穿越机或者中大型载重的无人机可能需要调整默认PID。
开始飞行:
- 请找能够熟练操作自稳模式(Stabilize)的操控员,使用自稳模式(Stabilize)起飞。
[!NOTE] 首飞/调参飞行需要专业的飞手执行,对于新手或者只飞过消费级飞机的飞手不合适参与调试;如果您没飞过自稳模式模式,强烈建议您聘请专业的飞手进行调试。
- 长按GPS上的安全开关按键,使其长亮打开安全开关。
- 请所有必要的配置完成,控制器LDC闪烁绿色;则意味着检查所有检查通过,允许解锁。如果闪烁黄色,查看地面站的提示并处理警报。
解锁飞机
- 将油门杆拉到最低同时方向杆拉到最右,保持3秒左右等待飞行器解锁。(油门最低同时方向最左为上锁)。
[!Tip] 如果解锁失败查看警告与故障排除
- 慢慢增加油门,控制飞行器起飞,观察飞机是否有明显的振荡或者大辐晃动
[!Tip] 如果有明显振荡或大幅摆动无法稳定起飞。立即降落并调整PID
- 将飞机控制在1米左右高度,并尝试小幅控制俯仰横滚,观察姿态响应,便于后续的PID调整。
[!NOTE] 如果首飞姿态不稳,则将飞机及时降落并执行上手操作。根据PID调试指南调整PID参数以达到稳定效果。
电机上锁
- 确保飞机已经着陆,将油门杆拉到最低同时方向杆拉到最左,保持3秒左右等待飞行器。
[!Warning] 请在起飞前记住上锁及解锁操作;操作时,操作不要带到俯仰和横滚杆需保持中位;当飞行失控时应及时降落和上锁。
附录
不允许解锁的飞行模式
[!Tip] 在部分模式下无法解锁,详情见下表。
| 无法解锁的飞行模式 | 例外情况 |
|---|---|
| AUTO(自动模式) | 当 AUTO_OPTIONS 第0位被设置时(允许在此模式下解锁) |
| AUTOTUNE(自动调参模式) | — |
| BRAKE(刹车模式) | — |
| CIRCLE(环绕模式) | — |
| FLIP(翻转模式) | — |
| GUIDED(引导模式) | 通过 MAVLink DO_ARM/DISARM 指令、Lua 脚本,或在 GUID_OPTIONS 启用后使用通用辅助功能开关 |
| LAND(降落模式) | — |
| RTL(返航模式) | — |
| SMARTRTL(智能返航模式) | — |
| SYSID(系统识别模式) | — |
| AVOIDADSB(ADS-B 避障模式) | — |
| FOLLOW(跟随模式) | — |
| AUTOTUNE(自动调参模式) | — |
[!Tip] 若已配置,您可以使用
RC_xOPTION开关进行解锁或者上锁,具体可参考开关选项“153”。
解锁失败?
当您按照解锁和上锁操作时后,依然无法对飞行器进行解锁和上锁操作,根据下表情形进行操作
| 状态描述 | 具体说明 |
|---|---|
| ST主状态灯黄色闪烁 | 通过通信链路连接LGC地面站查看警报信息进行处理。 |
| ST主状态灯绿色闪烁 | 校准遥控器或者检查ARMING_RUDDERR参数值(ARMorDisarm) |
| 其它情况 | 当前状态处于不允许解锁的模式或者安全开关未被按下(Safety状态灯需常亮) |