遥控器连接与校准
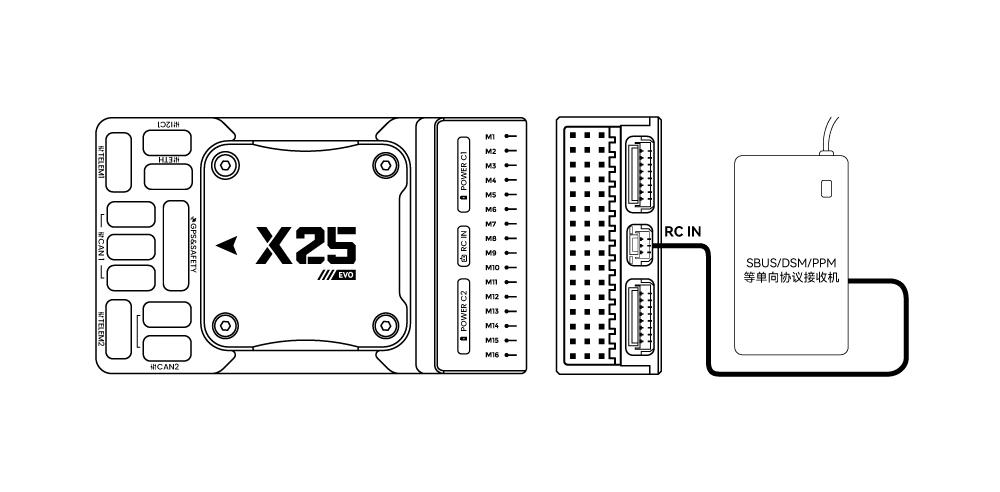
使用CUAV控制器家族中的专用配线进行连接,SBUS接收机连接至RCIN接口或者SBUS/DSM接口。
对于安卓一体遥控器
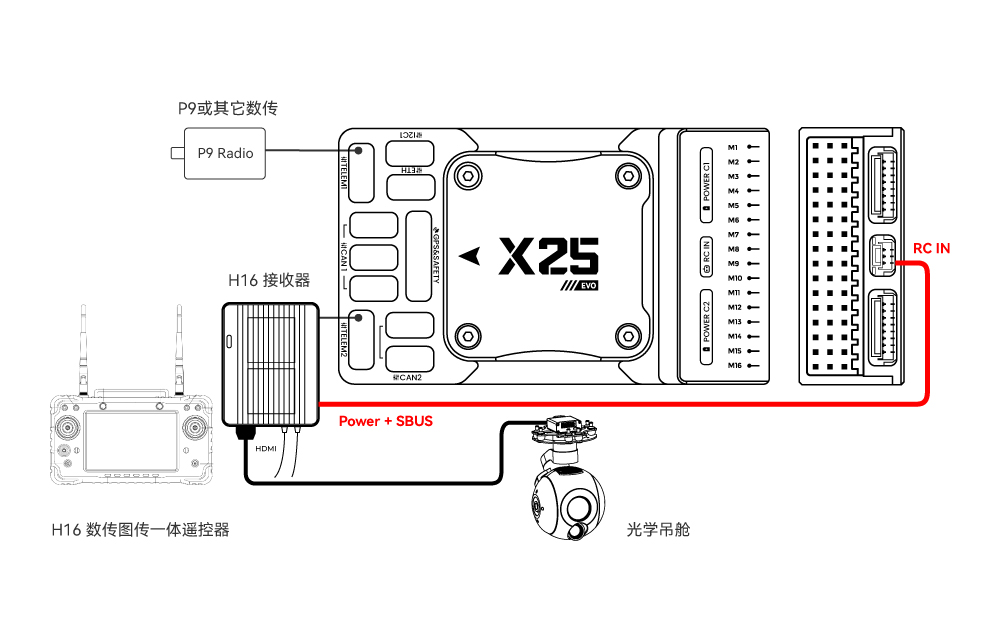
[!TIP] 建立h16遥控器与飞机的通信
对于航模遥控器:
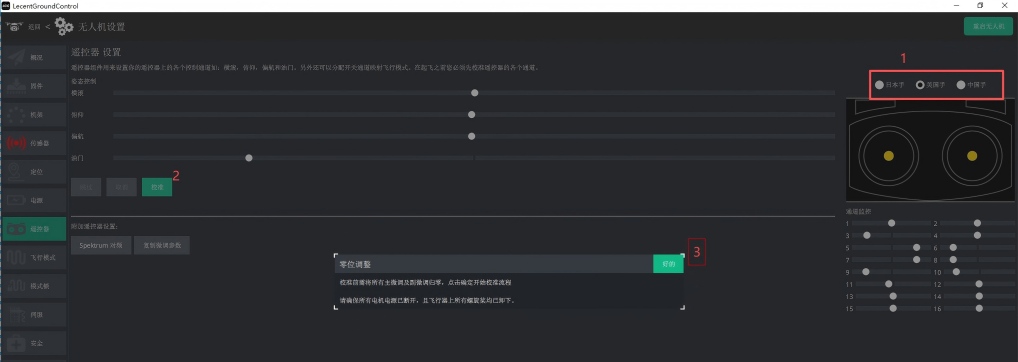
校准
- 进入LGC地面站无人机配置界面》遥控器》打开手持遥控器,建立与接收机的通信。
- 根据遥控器的操控模式选择操作习惯(日本手、美国手、中国手) //日本手/美国手、中国手的操作差异?。
- 点击左侧校准按钮。
- 执行必要的遥控器微调归零,并拆卸螺旋桨。
- 按照右边操作图示/左侧文字提示,将油门杆下拉至最低位,点击下一步
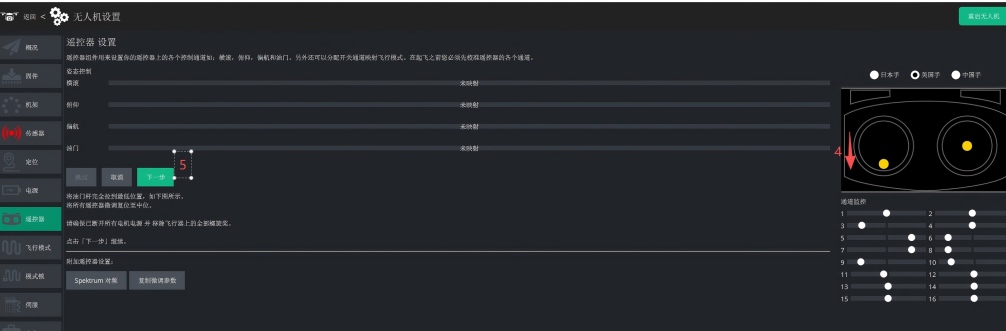
- 按照右边操作图示/左侧文字提示,系统将识别到对应操作将自动执行操纵杆校准流程。
拨动其它需要用到的拨杆/通道(最少需要校准操纵杆和飞行模式拨杆),点击“下一步”
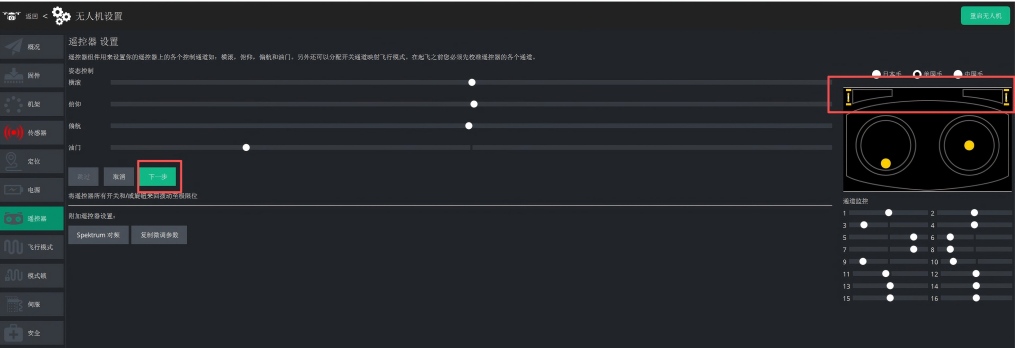
点击“下一步”,确认校准值将写入控制器

- 完成校准。