故障保护设置(安全)
ArduPilot支持低电压保护、EKF故障保护、遥控器失控保护及GCS地面站失联保护等。

电池故障保护
一般失效保护:
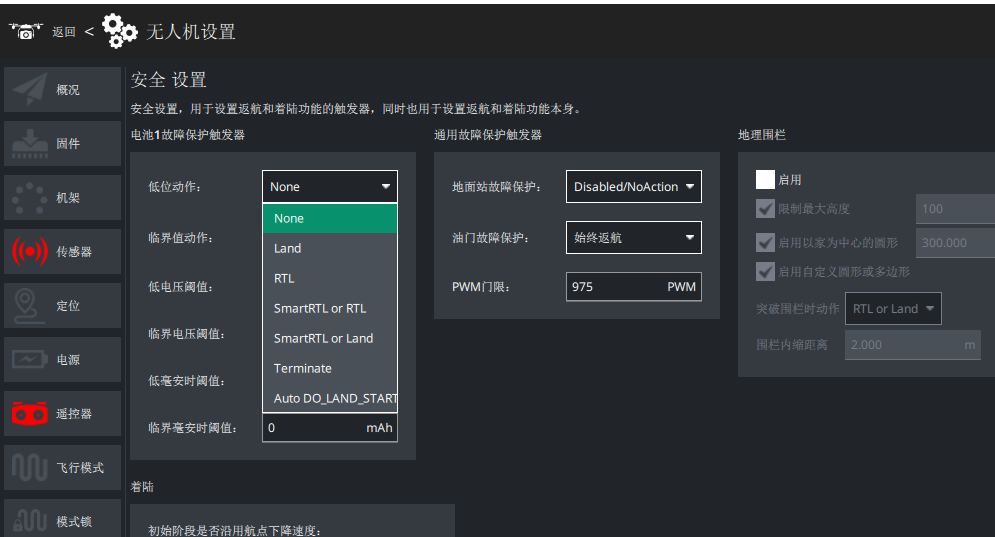
- 低位动作(
BATTx_FS_LOW_ACT)- 触发条件:电池整体电压 低于低电压/低容量(毫安时)阈值 时触发。
- 建议设置:RTL(Return to Launch,即返航模式)。
- 作用:这是一级低电压预警,优先让无人机自主飞回起飞点,避免飞手因疏忽导致电压持续下降。
- 低电压阈值(
BATTx_LOW_VOLT)- 定义:触发低位动作的电压临界值,指电池整体电压,不是单个电芯电压。
- 自动计算:在初始设置界面,输入单片电芯的空载电压,系统会自动换算出整体低电压阈值并覆盖默认值。
- 手动设定:根据电池的材质(如锂聚合物电池)、性能参数,自行设定更适配的数值。
紧急失效保护
临界电压阈值(
BATTx_CRT_VOLT)- 定义:触发临界降落动作的电压临界值,同样指电池整体电压,非单片电芯电压。
- 核心注意:这个阈值必须低于低电压阈值,且要参考电池厂家给出的最低放电电压,不能设置过低。
- 自动计算:在初始设置界面,输入单片电芯的空载电压,系统会自动换算出整体低电压阈值并覆盖默认值。
- 手动设定:根据电池的材质(如锂聚合物电池)、性能参数,自行设定更适配的数值。
临界值动作(
BATTx_CRT_ACT)- 触发条件:电池整体电压 低于临界电压阈值 时触发。
- 建议设置:LAND(降落模式)。
- 作用:这是二级强制保护,电压已接近电芯最低安全电压,必须立即降落,防止电池因过放出现鼓包、损坏甚至起火风险。
电池容量保护(不推荐)
对于智能电池或者精度能达到类似要求的电源模块,也可以通过电池剩余容量设置故障保护。
- 首先需要设置电池容量
BATTx_CAPACITY(可通过电源模块配置界面修改) - 低毫安时阀值(
BATTx_LOW_MAH)- 定义:剩余容量低于该值触发低位动作(
BATT_FS_LOW_ACT)
- 定义:剩余容量低于该值触发低位动作(
- 临界毫安时阀值(
BATTx_LOW_MAH)- 定义:剩余容量低于该值触发临界值动作(
BATT_CRT_ACT)
- 定义:剩余容量低于该值触发临界值动作(
GCS地面站故障保护
在通信链路通信断开导致地面站与飞行器失去通信时触发。
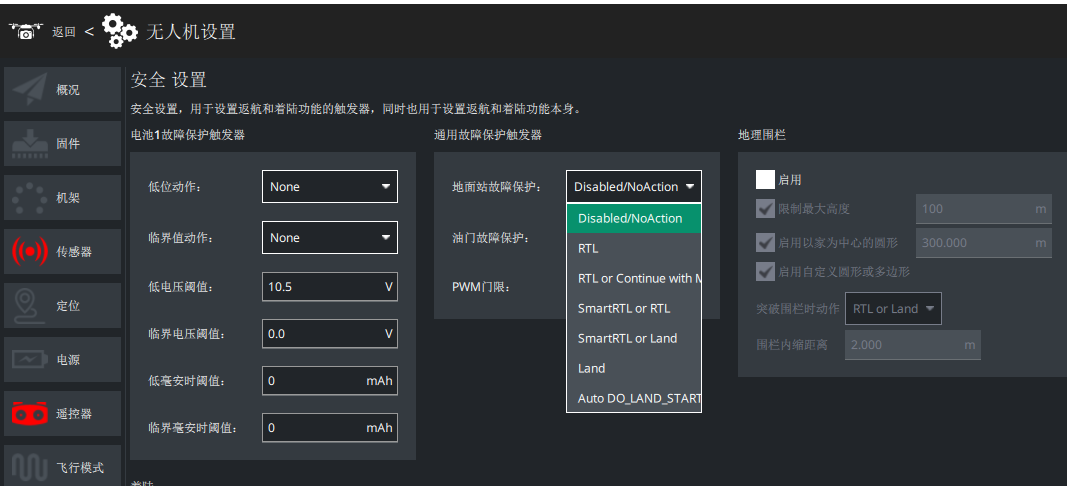
- 地面站故障保护(
FS_GCS_ENABLE)- 选项:不启用无动作、RTL(返航)、RTL或者继续任务(4.0以上固件弃用,看FS_options)、智能RTL或者返航、智能RTL或降落、降落、自动开始降落或者RTL、Brake/降落。
- 失联超时时间(
FS_GCS_TIMEOUT)- 当地面站与飞行器通信断开多少时间,无法恢复则触发故障保护。
- 建议:如果你的飞行不需要实时通过地面站控制,并且有遥控器,则不启用它;或者用故障保护选项;只有当你启动飞机后有连接地面站,然后断开才会触发,如果没有连接过地面站不会触发保护。
遥控器故障保护
遥控器失控保护是通过油门的PWM值或者SBUS的故障标志位来识别的。;对于油门故障保护需要在遥控器中设置失控保护,当失控时,接收机油门通道(RC3)输出远低于正常通信时的油门PWM。

油门故障保护(
FS_THR_ENABLE)- 选项:禁用/失效、总是RTL、在自动模式时继续执行航线、降落
PWM门限(
FS_THR_VALUE)- 设置为高于失控时接收机输出的值但需明显低于正常控制时的值。
[!TIP] 对于SBUS接收机,失控时会自动发送一个SBUS故障标识位;就算没有设置PWM门限也会触发失控保护。建议设置保护动作为返航或者故障保护选型,自动模式下继续执行航线。
故障保护选项
ArduPilot 4.0以上固件提供电池、遥控器和地面站故障保护附加选项掩码,用于补充特殊状态下触发的故障保护。
- 故障保护附加选项掩码
- 选项:触发RC故障保护时处于自动模式则继续执行任务、触发GCS故障保护时处于自动模式则继续、触发遥控器故障保护时处于Guide(引导)模式则继续、触发任何一个故障保护时处于降落状态则继续、触发GCS故障保护时处于操控员手动控制时则继续。
- 选项为多选,这是故障保护动作的特殊状态补充;根据自身需求设置。