日志与故障分析
默认情况下,飞行器解锁后将在SD中创建飞行闪存日志(Dataflash logs);在飞行后下载或者直接读取SD卡中
[!TIP] 闪存日志文件可以使用Mission Planner/MAVExplorer/ArduPilot WEB分析工具/PID评估工具打开进行分析;闪存日志作为飞行器的黑匣子记录;常用于故障事后分析;飞行性能/PID调试分析。
[!NOTE] 如果调试时需要启动即记录日志可通过设置
LOG_DISARMED为1。对于首次飞行或者用于PID分析,需要先进行调参日志分析配置.
日志存储相关参数
| 参数名 | 核心作用 | 关键取值/说明 |
|---|---|---|
| LOG_BACKEND_TYPE | 指定日志存储/传输位置(位掩码,支持叠加) | 0:禁用;1:SD卡(常用);2:MAVLink流式(需921600波特率);4:板载数据闪存(部分板卡支持) |
| LOG_BITMASK | 控制日志记录内容,决定详细程度与文件大小 | 0:禁用;默认值:保留核心数据;其他值:按飞行器类型配置,剔除无用数据减小体积 |
| LOG_DISARMED | 配置未解锁状态日志规则 | 0:仅解锁后记录;1:通电即录(调试用);2:非USB供电时录;3:删除未解锁日志 |
| LOG_FILE_DSRMROT | 控制日志文件轮转,拆分多阶段飞行日志 | 非0:解锁→15秒→重解锁,强制新建日志;0:默认,一个电源循环对应一个日志 |
| LOG_FILE_MB_FREE | 设定存储介质最小预留空间 | 默认500MB;空间不足时,自动删除最旧日志释放空间 |
| LOG_FILE_RATEMAX | 限制流式日志写入速率,控制文件大小 | 默认0(无限制);速率依赖 SCHED_LOOP_RATE;补充:LOG_BLK_RATEMAX(块日志)、LOG_MAV_RATEMAX(MAVLink日志)分别对应同类限制 |
| LOG_MAX_FILES | 设定最大日志文件数,实现循环覆盖 | 1~500;达上限后,新日志覆盖最早日志 |
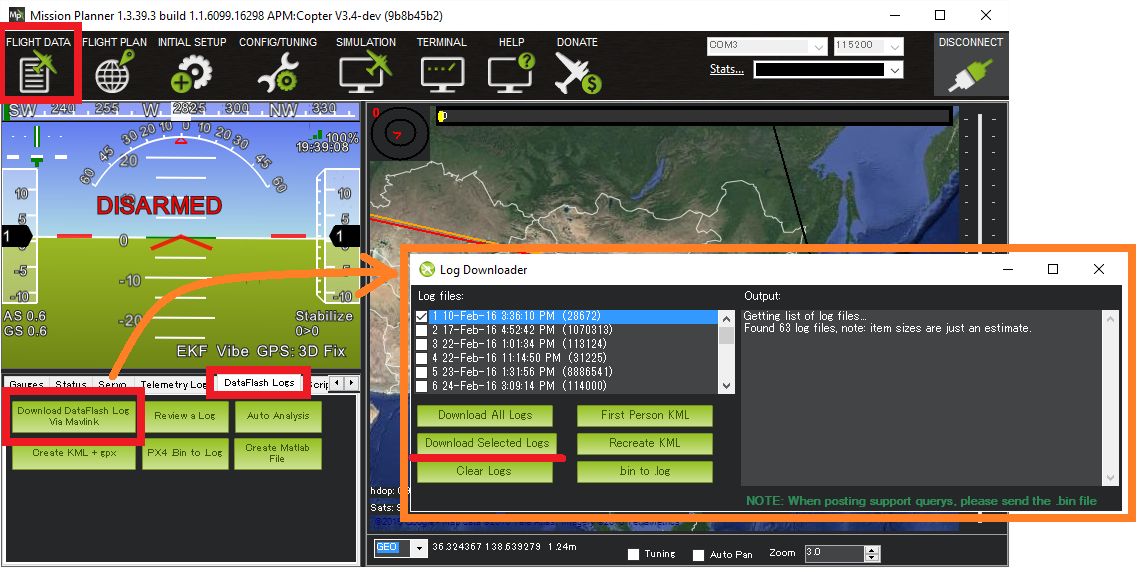
下载闪存日志
- 用USB线将飞行器连接到地面站。
- 打开 Mission Planner 的 “飞行数据”(Flight Data)界面
- 点击左下角 “数据闪存日志”(DataFlash Logs)选项卡,按下 “通过 Mavlink 下载数据闪存日志”(Download DataFlash Log Via Mavlink)按钮
- 选择需下载的日志,文件会保存到 MissionPlanner/logs 目录下,按飞行器类型分类(如 QUADCOPTER 文件夹)。
日志记录内容设置
LOG_BITMASK 参数控制日志记录的消息类型,不同飞行器的位定义不同(以下为多旋翼(Copter)的位掩码表):
| 位(Bit) | 位掩码名称(BitMask Name) | 置位时记录的内容 |
|---|---|---|
| 0 | Fast Attitude | 姿态(SCHED_LOOP_RATE 速率);对于PID评估需要开启 |
| 1 | Medium Attitude | 姿态(10Hz 速率) |
| 2 | GPS | GPS 数据 |
| 3 | System Performance | CPU 等性能监控数据 |
| 4 | Control Tuning | 控制数据 |
| 5 | Navigation Tuning | 导航数据 |
| 6 | RC Input | 遥控器输入数据 |
| 7 | IMU | IMU(加速度计/陀螺仪)数据 |
| 8 | Mission Commands | 任务/GCS 指令 |
| 9 | Battery Monitor | 电池监控数据 |
| 10 | RC Output | 舵机输出数据 |
| 11 | Optical Flow | 光流数据 |
| 12 | PID | PID 控制器数据,对于PID评估需要开启 |
| 13 | Compass | 罗盘数据 |
| 15 | Camera | 相机数据 |
| 17 | Motors | 电机数据 |
| 19 | Raw IMU | 原始 IMU 数据(未处理) |
| 20 | Video Stabilization | 姿态(SCHED_LOOP_RATE 速率) |
| 21 | Fast harmonic notch | 快速谐波陷波数据 |
[!NOTE] 姿态(ATTITUDE)记录速率取所选选项中的最高值;EKF3 数据的记录由 EK3_LOG_LEVEL 参数控制。
回放日志
可使用下方四个软件进行日志回放和分析