航线航点参数
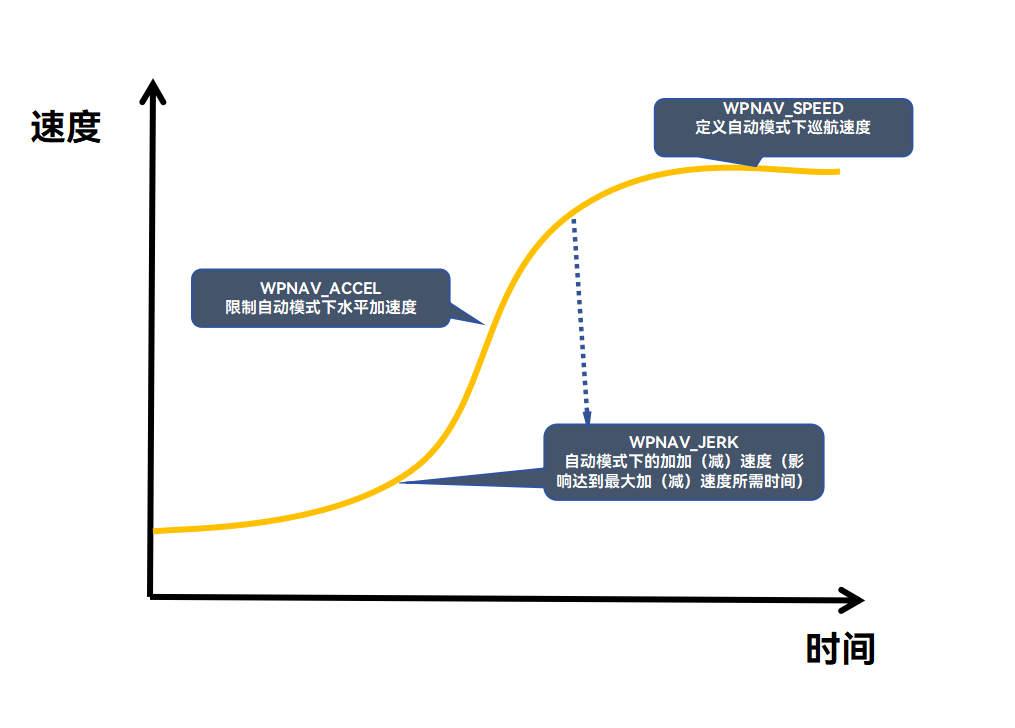
航线运动学参数
| 参数名称 | 注释 |
|---|---|
| WPNAV_ACCEL | 航线水平加速度,影响航线飞行速度变化快慢 |
| WPNAV_JERK | 自动模式下的加加速度;定义加速度的变化快慢 |
| WPNAV_SPEED | 航线飞行巡航速度 |
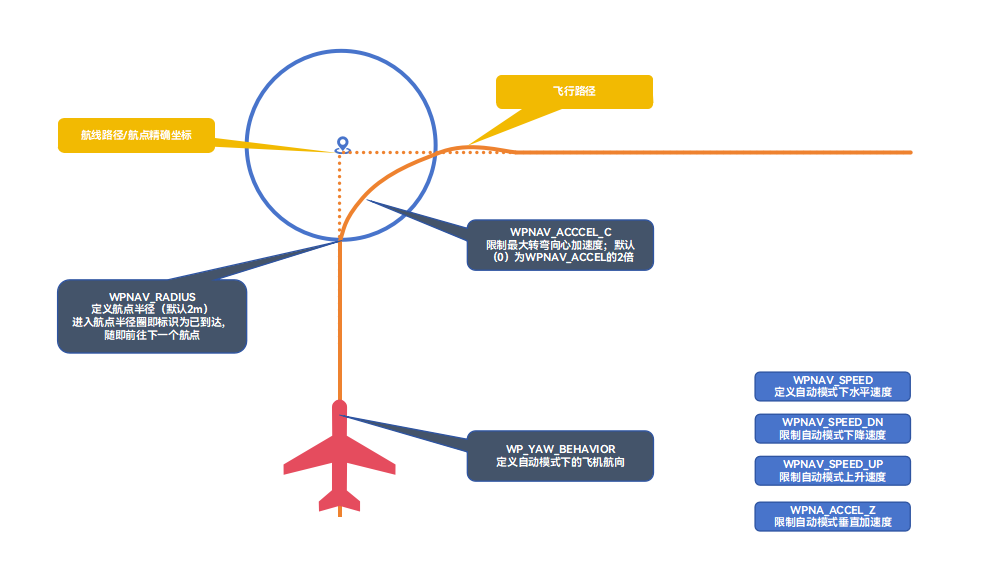
航点运动学参数
| 参数名称 | 注释 |
|---|---|
| WPNAV_RADIUS | 航点半径,进入航点半径圈,即视为“已到达;以提高航线飞行效率 |
| WPNAV_ACCEL_C | 限制最大转弯向心加速度;默认为0;WPNAV_ACCEL的2倍 |
| WPNAV_ACCEL_Z | 限制自动模式下垂直加速度 |
| WP_YAW_BEHAVIOR | 定义自动模式下的飞机航向,可设为面向下一个航点 |
| WPNAV_SPEED_UP | 限制自动模式上升速度 |
| WPNAV_SPEED_DN | 限制自动模式下降速度 |