飞行参数调整
调试多旋翼飞行器时,首要目标是让机身姿态稳定、无振荡,为后续测试打好基础。
- 将飞行器切换至
STABILIZE模式 - 缓慢推油门,使飞行器离地 2~3 米,观察俯仰、横滚通道的响应状态。
[!Warning] 调参试飞属于高危操作,仅限专业人员操作,相关风险由操作者自行承担,本文仅作技术分享。若无法承担风险,请直接选购成品无人机。 调试过程中,若机身出现明显晃动、抖动,请立即收油门,中止起飞或降落。调整 PID 前,请先完成 调参前配置。
默认PID控制器经验分享
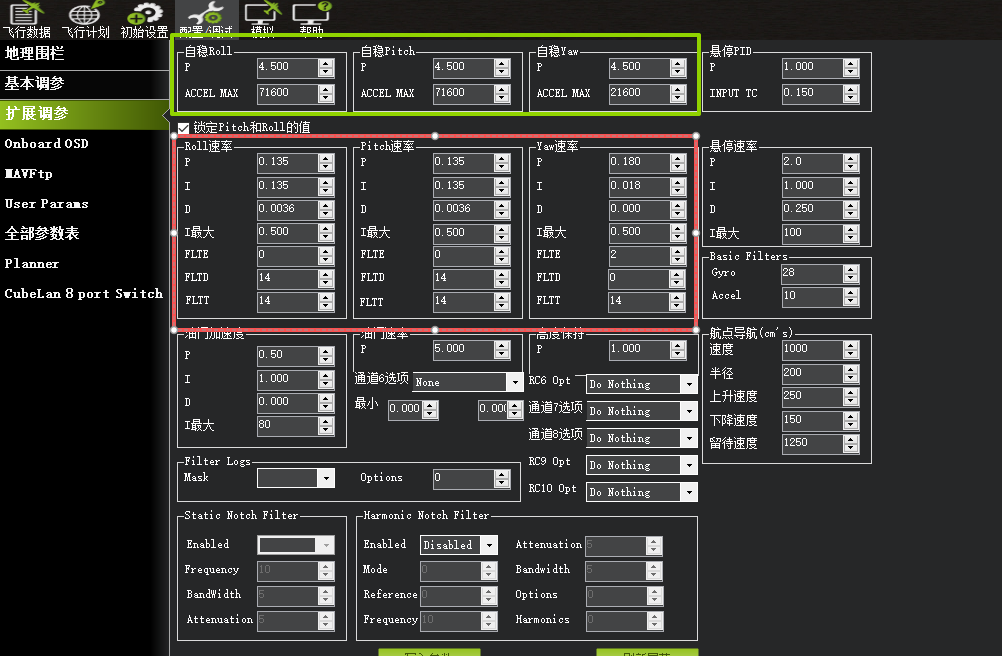
[!NOTE] 自稳(角速度)P 决定姿态修正的速度与力度,速率 P 决定飞行平稳性。自稳 P 会对速率 P 产生显著影响;除非需要提升飞行器机动灵敏度、优化操控手感,或速率 P 已达到系统极限,否则不建议修改角速度 P。该参数数值越大,飞行器抗风能力越强。常规调试优先调整红色框内的速率 PID。
[!Tip] 常规动力机型的默认参数适配小型飞行器。微轻型飞行器需降低速率 P;中大型飞行器通常需要提高速率 P。同机型下:动力越强,所需速率 P 越小;机臂/机翼刚性越弱,越需要提高 D 值抑制抖动;角速度 P 越大,匹配的速率 P 就要相应减小。
1、轴距 250 及以内飞行器,起飞出现快速抖动,建议按如下配置:
| 轴类型 | 参数名 | 默认值 | 建议初始值(降低P值减小抖动) |
|---|---|---|---|
| 横滚(Roll) | ATC_RAT_RLL_P | 0.135 | 0.07 |
| 横滚(Roll) | ATC_RAT_RLL_I | 0.135 | 0.07 |
| 横滚(Roll) | ATC_RAT_RLL_D | 0.0036 | 0.0016 |
| 俯仰(Pitch) | ATC_RAT_PIT_P | 0.135 | 0.07 |
| 俯仰(Pitch) | ATC_RAT_PIT_I | 0.135 | 0.07 |
| 俯仰(Pitch) | ATC_RAT_PIT_D | 0.0036 | 0.0016 |
| 偏航(Yaw) | ATC_RAT_YAW_P | 0.180 | 根据需求调整 |
| 偏航(Yaw) | ATC_RAT_YAW_I | 0.018 | 根据需求调整 |
| 偏航(Yaw) | ATC_RAT_YAW_D | 0.000 | 根据需求调整 |
2、大型载重无人机,建议将电机外倾 3° 以提升航向稳定性,也可根据实际需求适当加大外倾角,避免起飞时航向偏移(需先排除磁罗盘、遥控器摇杆带来的干扰)。
| 轴类型 | 参数名 | 默认值 | 建议初始值(提高值) |
|---|---|---|---|
| 偏航(Yaw) | ATC_RAT_YAW_P | 0.180 | 0.5 或更高 |
推重比较低、动力偏弱的多旋翼机型,需适当增大默认 PI 参数,参考值如下:
| 轴类型 | 参数名 | 默认值 | 建议初始值(提高值) |
|---|---|---|---|
| 横滚(Roll) | ATC_RAT_RLL_P | 0.135 | 0.25 |
| 横滚(Roll) | ATC_RAT_RLL_I | 0.135 | 0.25 |
| 俯仰(Pitch) | ATC_RAT_PIT_P | 0.135 | 0.25 |
| 俯仰(Pitch) | ATC_RAT_PIT_I | 0.135 | 0.25 |
| 偏航(Yaw) | ATC_RAT_YAW_P | 0.180 | 0.5 或更高 |
3、机臂、机翼刚性较弱的机型
机身结构偏软的飞行器易出现高频抖动,一味地降低 P 值,会造成姿态响应迟缓、机身晃动。此种情况可适当提高 D 值,在抑制抖动的同时保证姿态响应。
注:根治该问题的最优方案是对机身结构进行加固。
| 轴类型 | 参数名 | 默认值 | 建议初始值(加D值减小抖动) |
|---|---|---|---|
| 横滚(Roll) | ATC_RAT_RLL_D | 0.0036 | 0.0040 或更高 |
| 俯仰(Pitch) | ATC_RAT_PIT_D | 0.0036 | 0.08 或更高 |
[!Warning] 以上参数为调试经验参考值,仅适用于首次试飞。如需完全适配机型,请结合飞行状态,参照速率 PID 调整指引进一步优化。
速率PID值调整指引
[!TIP] 新手推荐调参顺序:先调试速率 P,再设定速率 I(通常取 I=P),最后根据工况调整 D 值(机身动作僵硬则降低 D,出现抖动则提高 D)。试飞后可使用 PID评估工具 分析日志并优化参数。
| 参数类型 | 核心作用 | 异常表现 | 调整方向 | 单次调整幅度 |
|---|---|---|---|---|
| P(速率比例) | 误差修正的响应速度与力度 | 过小:角速度响应慢、飞行无力、姿态跟随滞后 过大:高频抖动、姿态过冲 |
机身晃动、动力偏弱则加;出现抖动则降 | 0.01~0.04 |
| I(速率积分) | 累积误差修正 | 过小:误差无法消除、持续累积 过大:多余小幅动作、回弹、低频摆动 |
参数容错范围较大,一般与P值保持一致 | 逐步趋近P值 |
| D(速率微分) | 误差预判与抑制,削弱高频抖动 | 过小:无法抑制高频抖动 过大:飞行器反应迟钝、动作僵硬 |
出现抖动则加,动作迟缓则减 | 0.0002~0.0004 |
典型表现与调试方向
| 控制轴 | 核心参数(ArduPilot) | 典型表现与处理方法 |
|---|---|---|
| 俯仰/横滚轴(ROLL/PITCH) | ATC_RAT_P(速率P) | 机身缓慢晃动、响应无力 → 提高 P |
| 俯仰/横滚轴(ROLL/PITCH) | ATC_RAT_P/D(速率P、速率D) | 高频抖动、姿态过冲 → 降低 P 或提高 D |
| 俯仰/横滚轴(ROLL/PITCH) | ATC_RAT_I(速率I) | 常规场景直接取与速率P相同数值 |
| 航向轴(YAW) | ATC_RAT_YAW_P(速率P) | 航向无法锁定、自旋、轨迹偏移 → 提高 P |
| 航向轴(YAW) | ATC_RAT_YAW_P(速率P) | 航向响应过激、出现振荡 → 降低 P |
[!NOTE] PID 调参核心是匹配 P 与 D 的比例,让飞行器响应迅速且飞行平稳。常规工况下,FLIT、FLTD 以及陀螺仪、加速度计截止频率沿用 调参前配置 生成的参数;若电机出现明显啸叫,可尝试降低陀螺仪截止频率。
自稳P(角速度)控制器
外环(自稳环):自稳 P 代表遥控灵敏度,决定修正姿态误差的角速度大小。
[!NOTE] 正常情况下不建议修改自稳 P 值。若需提升遥控操控效果,需优先调整该参数,因其会显著影响速率 P 匹配逻辑;该参数数值越大,配套的速率 P 就需要越小,参数过大会导致速率 P 难以适配。
若需提升操控灵敏度,可按 20% 幅度逐步增大参数,直至机身出现抖动,再回调 20% 即可。
垂直(油门)PID控制器调整
- 将参数
MOT_HOVER_LEARN设置为 2,开启悬停油门学习功能。
[!Tip] 飞行器在 AltHold 定高模式下若出现高度上下振荡,可将位置环、速度环参数降低 50%,对应参数:
PSC_POSZ_P(PSC_D_POS_P)、PSC_VELZ_P(PSC_D_VEL_Z)。 若定高状态稳定、无上下波动,则无需调整高度相关参数,多数机型默认参数即可正常使用。
- 在
STABILIZE自稳模式下起飞,爬升至 5 m 高度后切换至AltHold定高模式(随时做好切回自稳模式的准备,应对高度失控风险)。 - 若电机出现频繁抖动、油门剧烈波动,每次按 30% 幅度降低
PSC_POSZ_P与PSC_VELZ_P。 - 保持悬停状态至少 30 秒,让悬停油门参数完成收敛,之后降落并锁定电机。
- 参考读取到的
MOT_THST_HOVER数值,按如下规则设置参数:PSC_ACCZ_P(PSC_D_ACC_P) = 1.5 × MOT_THST_HOVER PSC_ACCZ_I(PSC_D_ACC_I) = 2 × PSC_ACCZ_P(PSC_D_ACC_P) ATC_THR_MIX_MAX = 0.9 // 适用条件:MOT_THST_HOVER < 0.3 - 再次在
STABILIZE模式下起飞,爬升至 5 m 后切换至AltHold模式。定高飞行正常后,可直接使用AltHold模式起飞(该模式需油门输出 60% 以上才能正常起飞)。 - 下一步进行悬停(Loiter)控制环调参。
[!Tip] 完成空载悬停油门学习后,务必将
MOT_HOVER_LEARN设为 0,关闭学习功能。否则飞行器挂载载荷飞行时,参数会被重新刷新,引发油门抖动。[!NOTE] 多数机型无需调整高度相关参数。
快速飞行时掉高的处理办法
该问题大多因飞控传感器外露,飞行时气流灌入气压计,造成高度数据波动,可参考以下方案处理:
方案一:解决根源(物理防护方案)
| 解决思路 | 具体操作 | 操作说明 | 注意事项 |
|---|---|---|---|
| 阻断风干扰源头 | 给飞控加装防护盖子 | 通过物理遮挡,避免风直接吹向气压计传感器 | 1. 盖子不可完全密封,需预留通风孔;2. 保证传感器散热通畅;3. 不影响飞控其他接口使用 |
方案二:降低气压计高度源权重
| 解决思路 | 参数名称 | 参数注释 | 推荐设置 | 适用场景 |
|---|---|---|---|---|
| 引入GPS高度补偿 | EK3_OGN_HGT_MASK | 主高度源非GPS时,调用GPS高度纠正主高度源的偏移与基准面时间漂移 | GPS可信(如RTK模式)时设为1 | 气压计定高存在轻微偏移,且GPS信号稳定 |
| 调整传感器权重 | EK3_ALT_M_NSE | 定义高度测量噪音的均方根值,数值越大,气压计权重越低,GPS/加速度计权重越高 | 风干扰较明显时适当增大数值 | 气压计受气流影响导致高度数据波动频繁 |
方案三:更换主高度源(二选一)
| 解决思路 | 参数名称 | 参数注释 | 推荐设置 | 操作前提 |
|---|---|---|---|---|
| 切换主气压计 | BARO_PRIMARY | 指定飞控优先使用的主要气压计 | 选择编号对应不易受风干扰的气压计 | 飞控内置多气压计 |
| 切换垂直位置源 | EK3_SRC1_POSZ | 设定EKF3算法的垂直位置(高度)传感器来源 | 使用RTK时设为3(GPS作为高度源) | 已搭载RTK模块,且GPS高度数据可信度高 |
方案四:风估计补偿
悬停参数
悬停(位置环)PID调整
[!Tip] 调试悬停位置环 PID 前,必须先完成俯仰、横滚通道 PID 调试。部分在自稳、定高模式下未显现的晃动、抖动问题,会在悬停模式中暴露出来。多数机型无需修改位置环参数
| 参数名称 | 核心功能 | 注释&工作逻辑 | 调试原则&异常场景处理 |
|---|---|---|---|
| PSC_POSXY_P | 位置环P增益(水平) | 将实际位置与目标位置的偏差,线性转换为水平期望速度,传递给水平速率控制器,是位置环核心调节参数,决定位置偏差的响应速度。 | 1. 偏小:定位不稳、飞行器飘移 2. 偏大:纠偏力度过强,定点时出现抖动、超调 3. 若出现规律性圆周飘移,优先排查罗盘校准、GPS信号,而非调整参数 |
| PSC_VELXY_P | 速度环P增益(水平) | 将水平期望速度与实际速度的偏差,转换为目标加速度,决定速度偏差的即时纠偏力度。 | 1. 偏小:速度跟踪滞后,打杆转向反应慢,间接造成位置飘移 2. 偏大:纠偏过激,出现速度超调、机身窜动 |
| PSC_VELXY_D | 速度环D增益(水平) | 校正位置控制过程中速度的短期突变,用于平滑速度变化、抑制抖动。 | 1. 偏小:无法抑制速度波动,风速变化时易抖动、窜动 2. 偏大:阻尼过强,飞行器转向、加减速动作僵硬、响应滞后 |
| PSC_VELXY_I | 速度环I增益(水平) | 校正速度环长期稳态偏差。 | 1. 偏小:始终存在固定速度偏差 2. 偏大:积分累积过快,引发积分超调 |
[!Tip] 调参顺序:先调试 PSC_POSXY_P(位置环基础),再优化 PSC_VELXY_P(速度环核心),最后匹配 PSC_VELXY_D 与 PSC_VELXY_I。
刹车(制动)
悬停模式下刹车时,若机身姿态晃动明显或出现掉高,可检查并调整以下参数:
| 参数名称 | 注释 | 备注 |
|---|---|---|
| MOT_THST_EXPO | 油门曲线推力补偿 | 降低数值可缓解低速刹车时姿态晃动、侧翻风险;动力套件或FOC驱动建议设为 0~0.2 |
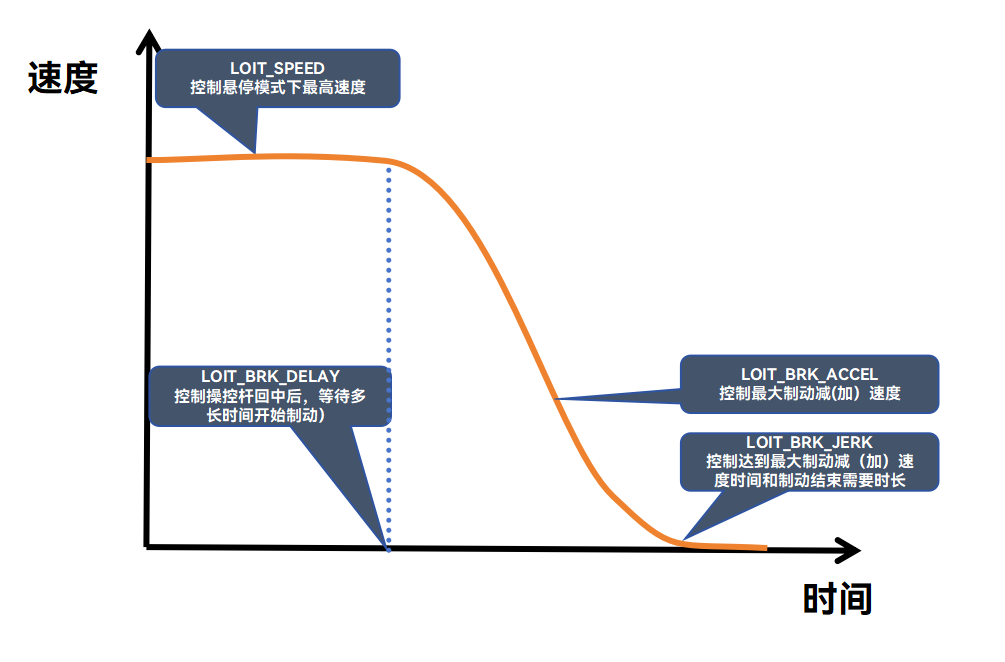
| Loit_BRK_ACCEL | 悬停刹车加速度 | 数值与刹车效率正相关,数值越大,悬停状态下制动越迅速 |
| Loit_BRK_JERK | 刹车加加速度 | 数值越大,刹车力度变化越剧烈;推荐取值为 Loit_BRK_ACCEL 的 2 倍 |
| Loit_BRK_DELAY | 刹车延时 | 摇杆回中后,飞行器先滑行指定时长再执行刹车;数值越大,过渡越平滑,刹车触发越晚 |
| LOIT_ACC_MAX | 位置误差校正最大加速度 | - |
| LOIT_ANG_MAX | 悬停模式最大倾斜角 | - |
悬停操控
| 参数名称 | 注释 | 备注 |
|---|---|---|
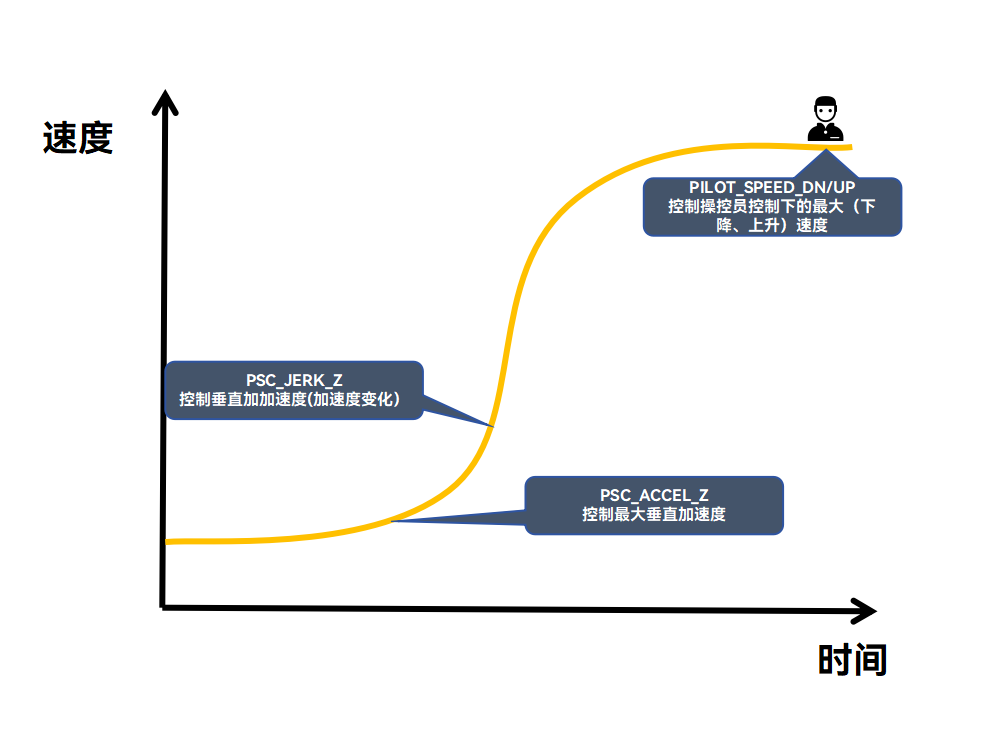
| PSC_JERK_Z | 垂直加加速度 | 控制垂直加/减速的变化速率 |
| PSC_ACCEL_Z | 最大垂直加速度 | 控制垂直方向速度变化快慢 |
| PILOT_SPEED_DN/UP | 手动模式最大上升、下降速度限制 | - |
遥控操控手感柔和平稳
新手用户,以及习惯消费级无人机操控手感的使用者,若希望大幅度打杆时机身动作依旧柔和,可通过限制操控加速度实现。
| 参数名称 | 单位 | 注释 |
|---|---|---|
| ATC_RATE_P_MAX | °/s | 俯仰通道最大角速度 |
| ATC_RATE_R_MAX | °/s | 横滚通道最大角速度 |
| ATC_RATE_Y_MAX | °/s | 航向通道最大角速度 |
[!Tip] 可根据个人操控习惯设置,数值越小,动作越柔和缓慢,常规建议设置为 30 °/s。
飞行角度限制(可选)
对于绝大多数操作人员,飞行器最大倾斜角度设置为 30° 即可满足使用需求,可根据实际需求自行修改。
| 参数名称 | 单位 | 注释 |
|---|---|---|
| ANGLE_MAX | 度 | 全模式通用最大倾斜角度 |
| PSC_ANGLE_MAX | 度 | 位置保持模式最大倾斜角度,设为 0 时沿用 ANGLE_MAX 数值 |
| LOIT_ANGLE_MAX | 度 | 悬停模式操控最大倾斜角度,设为 0 时,默认取值为 ANGLE_MAX 的 2/3 |
[!Tip] 角度限制越大,飞行器转向、位移加速度越快,但姿态维持难度也会提升,对飞控算法和操控人员技术要求更高。
油门PID增益
即便参数调校完善的多旋翼飞行器,油门快速突变时,也可能短暂丢失姿态控制。快速推油、收油过程中易出现俯冲、横滚偏移,该现象在高推重比的竞速无人机上尤为明显。可通过 ATC_THR_G_BOOST 参数改善此问题。
当 ATC_THR_G_BOOST 不为 0 时,油门快速变化会为 PID 回路提供动态增益,参数最大值为 1。启用后,速率 PID 增益提升 2 倍,角速度 PID 同步增强;参数数值越小,增益倍率越低。
[!Warning] 该功能未经过全面测试,请谨慎启用。