传感器位置偏移补偿
直升机3.5(及更高版本)包括补偿飞机上的传感器位置。 该页面阐明了可以设置哪些参数以及如何设置它们。
在15cm以内,大多数飞行器上的全部传感器(包括imu 、光流)不太可能提供一个补偿使其性能显著提升。
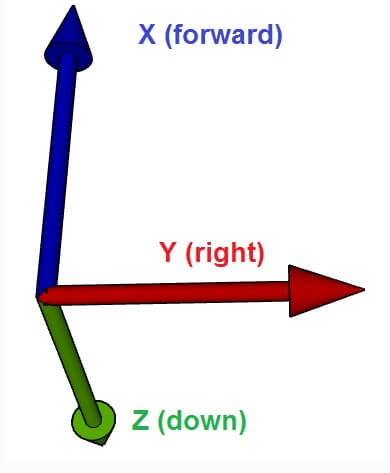
传感器的位置偏移被指定为与IMU(可以假定为飞行控制器板的中间)或飞行器重心的距离(以米为单位)的3个值(X,Y和Z)。
X:IMU和重心的前后距离。 数值为正表示飞行控制器安装在前方,负值表示在后方。
Y:IMU距离和重心的左右距和。 正值为重心在飞行器的右侧,负值表示在左侧。
Y:IMU和重心的距离。 正值较低,负值较高。
实际上距离传感器可以测量飞行控制器的中心距离,除非飞行控制器放置再与飞行器的重心距离很远的地方,在这种情况下,可以指定IMU位置偏移,然后另一个传感器的位置偏移 可以从飞行器的重心指定。
参数的细节
IMU(又名INS):
为了获得最佳效果,飞行控制器(以及因此的IMU)应放置在车辆的重心处,但如果物理上不可能,则通过设置以下参数可以部分补偿偏移。
INS_POS1_X,INS_POS1_Y,INS_POS1_Z第一个IMU的位置和飞行器的重心距离
INS_POS2_X,INS_POS2_Y,INS_POS2_Z第二个IMU的位置和飞行器的重心距离
INS_POS3_X,INS_POS3_Y,INS_POS3_Z第三个IMU的位置和飞行器的重心距离
补偿只是部分,因为ArduPilot可以根据飞行器的速度和位置估计,但不能校正加速度估计值。例如,如果飞行控制器被放置在飞行器的前方上,并且飞行器突然向后倾斜(即,旋转,使得它的前方向上),而没有偏移补偿,飞行器速度估计将暂时显示车辆在不行驶时爬升。随着位置偏移量的增加,不会显示这个瞬间爬升。 EKF仍然会显示出瞬时的垂直加速度,并且由于我们在高度保持控制器中使用加速度,这仍然可能导致飞行器瞬时减速。
虽然可以为每个IMU设置单独的位置偏移量,但大多数飞行控制器板上的IMU位置之间的差异非常小,以至于所有IMU都可以使用相同的值
全球定位系统:
GPS_POS1_X,GPS_POS1_Y,GPS_POS1_Z gps1的位置和飞机重心的距离
GPS_POS2_X,GPS_POS2_Y,GPS_POS2_Z gps2的位置和飞机重心的距离
Range Finder(声纳或激光雷达):
RNGFND_POS_X,RNGFND_POS_Y,RNGFND_POS_Z第一个RangeFinder和飞行器重心的距离
RNGFND2_POS_X,RNGFND2_POS_Y,RNGFND2_POS_Z第二个RangeFinder和飞行器重心的距离
光流:
FLOW_POS_X,FLOW_POS_Y,FLOW_POS_Z 光流和飞行器重心的距离。