UAVCAN 电调
直升机,飞机和汽车固件支持UAVCAN电子速度控制器(ESC),允许与飞行控制器进行双向通信,从而可以更容易地设置ESC和监控飞行中的电机运行状况。
连接pixahwk
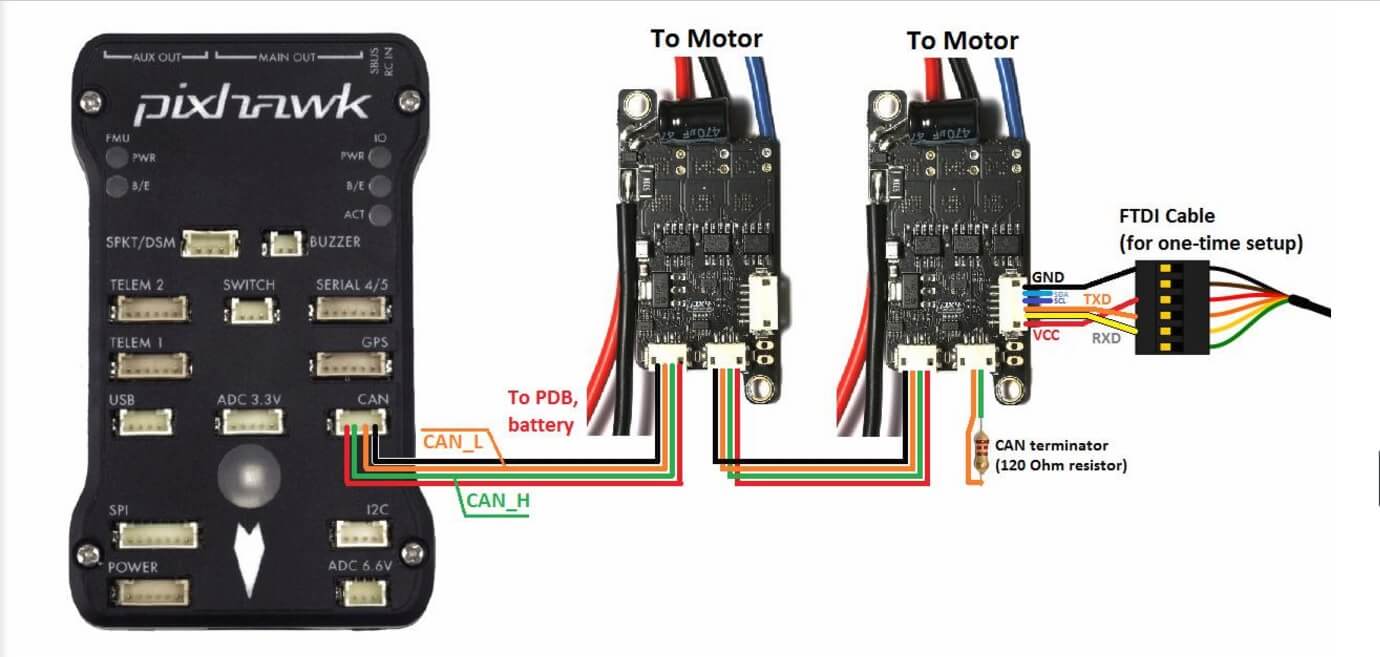
一个电调(将uavcan电调df13 4pin接口连接到Pixhawk的CAN端口); 每个后续的电调应使用4针UAVCAN电缆连接到以前的电缆。 最后的电调应该有一个CAN总线终端插入其中一个4针UAVCAN端口。
FTDI电缆连接仅用于下面讨论的一次性设置。
或者,可以使用UAVCAN GUI工具通过CAN总线配置电调。
使用CLI进行ESC设置
每个ESC必须使用FTDI电缆进行一次性手动设置,以定义其UAVCAN节点ID和电机编号。在未来版本的ardupilot中,这将被使用Mission planner(和其他GCS)的设置程序取代。
设置方法:
将FTDI电缆连接到电调的“开发人员端口”,如上图所示。
用电池给电调
上电
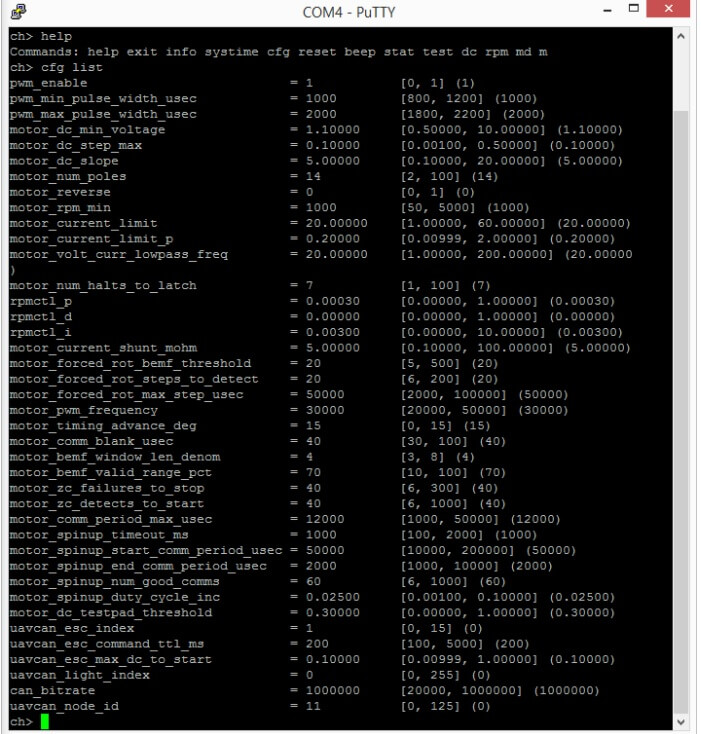
使用终端程序(如Putty)使用FTDI电缆的COM端口连接到电调,使用串行115200波特
率
按Enter键进入终端,出现“ch>”提示
键入cfg list以查看完整的参数列表
在电动机#1上(即四边形上的右前方),通过键入以下内容将uavcan_node_id设置为“10”并将esc_index设置为“0”
cfg set uavcan_node_id 10
cfg set esc_index 0
cfg保存(保存配置)
重启
测试电机动作:
直流臂(启用输出)
dc 0.2(以20%旋转电机)
dc(停止电机)
对每台电机都有一个node-id和索引1比前一个更高的电机重复2号电机(在一个quad的左后方),#3,#4等等(事实上,只要node-id是独特)。
本文引自:http://ardupilot.org/copter/docs/common-uavcan-escs.html