电池故障保护
概述:
电池故障保护,可以设置一个阈值,电压或者保留电量值,当电池电压/容量低于这个阀值是,无人机将自动执行RTL、SmartRTL或Land模式
使用电池故障保护,必须使用一个电压电流传感器才能设置和起效。
NOTE ArduPilot固件版本4.0及更高版本最多支持10个电池/电源监视器。以下所有讨论也适用于那些可选电池。每个都可以触发故障保护,并且每个都可以具有不同的操作和设置值。此外,一组电池可以视为一个整体,请参阅BATTx_MONITOR= 10。
故障保险何时触发
电池故障保护启动条件:
如果启用并正确设置;启动条件
电压低于BATT_LOW_VOLT设置值(更低版本中为FS_BATT_VOLT,超过10秒);如果值设置为零,基于电压的触发将被禁用。
剩余电量低于BATT_LOW_MAH参数(或旧版本固件中为FS_BATT_MAH);一般这个值设置为20%左右的电池电量(例如,对于5000mAh电池为“ 1000”);如果值设置为零,则将禁用基于容量的触发器(即,仅使用电压)
如果保护被触发,将会发生什么:
触发故障安全时:
蜂鸣器将播放响亮的低电量警报
LED将闪烁黄色
“Low Battery!”将显示在地面站HUD上(如果已连接数传)
然后会发生以下其中一种情况:
- 什么都不会发生:如果飞行器没有解锁
- 自动上锁:如果在增稳模式或者特技模式,油门为最低值
用户可配置的操作保存在BATT_FS_LOW_ACT(Copter-3.6或更高版本)或FS_BATT_ENABLE(Copter-3.5或更低版本)参数中:
- 1:LAND - 无人机将切换到降落模式
- 2:RTL - 如果可能,无人机将切换到返航模式但如果不可能(因为没有良好的定位)无人机将降落(默认)模式降落
- 3:SmartRTL或RTL - 如果可能,无人机将切换到SmartRTL模式,如果不可能(因为SmartRTL的位置缓冲器已满),无人机将切换到RTL。如果RTL也不可能(由于没有良好的定位),无人机将切换到Land模式模式降落
- 4:SmartRTL或Land - 如果可能,无人机将切换到SmartRTL模式,如果不可能(因为SmartRTL的位置缓冲器已满),无人机将切换到Land模式
- 5:停止 - 无人机将会上锁,电机将无输出。这是一个危险的选择,在绝大多数情况下都不应该使用。
与所有故障保护一样,用户可以通过将飞行模式切换到另一模式来重新控制控制无人机。除非设置了双层故障保护,否则电池故障保护不会再次触发(见下文)
即使故障保护动作设置为“禁用”(即BATT_FS_LOW_ACT = 0),蜂鸣器也会发出蜂鸣声,LED指示灯将呈黄色闪烁。 要完全禁用电池故障保护,请将BATT_LOW_VOLT和BATT_LOW_MAH设置为零。一旦电池故障保护已触发,则在重新启动飞行控制器之前无法重置。
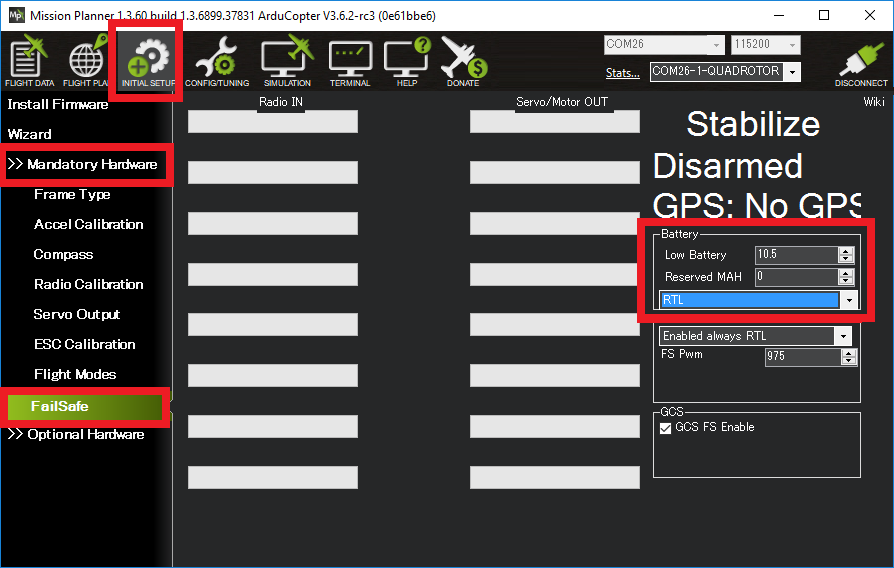
设置电池失效保护:
- 地面站》初始设置》?必要硬件》故障保护(FailSafe)界面
- 如果电池部分参数表显示为灰色,请按照说明设置电源模块
- 设置“低电池”阈值电压(根据电池电压进行设置,一般单锂电池的空电压为3.7/3.5,例如3S电池可以设置10.5-10.8)
- 保留容量mah(不建议使用),因为可能不准确如果不开启,请设置为0。
- 从下拉列表中选择所需的操作(Land,RTL,SmartRTL等)
新引入参数
FS_OPTIONS 参数(Copter 4.0和更高版本固件)是通过位掩码参数来选择修改无线电,GCS,和电池故障安全的标准动作的一个或多个选项。在Mission Planner完整参数列表或完整参数树中,方便的复选框弹出窗口可轻松设置此(以及任何其他位掩码)参数。请将地面站升级到1.3.69或以上版本以首先获取最新的参数定义。 FS_OPTIONS位如下:
设置的位0:如果在无线电故障保护上处于自动模式,则继续 位1置位:如果在地面控制站的故障保护上处于自动模式,则继续 位2集:继续如果导模无线电故障安全 设置的第3位:如果进入任何故障保险,则继续 设置的位4:继续进行地面控制站故障保护的先导控制 如果未设置上述任何一项,请按照配置执行BATT_FS_LOW_ACT或BATT_FS_CRT_ACT选项。 FS_OPTIONS位如下:
第1位掩码:如果在无线电故障保护上处于自动模式,则继续。
第2位掩码:如果在地面控制站的故障保护上处于自动模式,则继续。
第3位掩码:如果指引模式时无线电故障,则继续。
第4位掩码:如果进入任何故障保险,则继续
第5位掩码:继续在地面控制站进行引导控制
如果未设置上述任何一项,则按配置执行BATT_FS_LOW_ACT或BATT_FS_CRT_ACT选项。
只有位掩码位3会影响电池故障保护期间采取的措施。此参数还可以与GCS和无线电故障安全功能一起使用,因此请确保在设置此参数时将所有选项都考虑在内。
双层故障保护
Copter-3.6(及更高版本)包括双层电池故障保护。 如果电池电压或剩余容量低于甚至更低的阈值,则允许设置后续动作。 BATT_CRT_VOLT - 保持次级(下限)电压阈值。 设置为零则禁用。 BATT_CRT_MAH - 保持次级(较低)容量阈值。 设置为零则禁用。 BATT_FS_CRT_ACT - 保留要执行的辅助操作。 合理的设置是BATT_FS_LOW_ACT = 2(RTL)和 BATT_FS_CRT_ACT = 1(Land)
高级设置
BATT_FS_VOLTSRC允许配置是使用原始电池电压还是校正电压 BATT_LOW_TIMER: 可以配置电压低于故障保护触发阈值的必要时间 BATTx_: 触发对应电池的故障保护