Compass指南针校准
本文介绍了如何执行基本的指南针校准。
本文假定您使用的是最常见的配置-自动驾驶仪和指南针,箭头分别指向无人机机头。如果您使用其它配置,请参阅“ 高级指南针设置”。
校准过程
请勿在任何会产生金属或磁场的物体(计算机,手机,金属桌,电源等)附近校准罗盘,否则可能会导致校准异常。
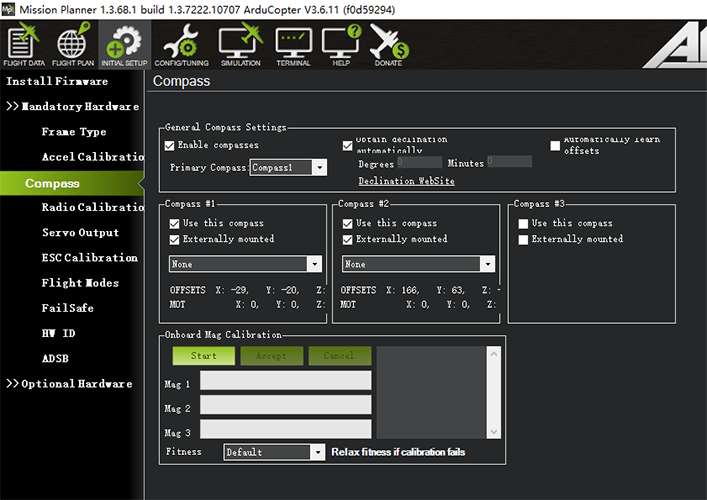
- 打开地面初始设置》必要硬件》指南针校准。
通常,您不需要更改任何“常规指南针设置”或指南针特定值(即“指南针#1”部分),但是您可能需要确认已选中“ 启用指南针和自动获取磁偏角”框。 如果您经常看到“指南针不一致”预警报消息,并且您确定外部指南针的方向正确,则可以禁用Compass#2(内部指南针)。
- 点击“开始(start)”按钮
- 如果您的自动驾驶仪装有蜂鸣器,您应该听到一声提示音,然后每秒发出一声短促的哔哔声
- 将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下指向地球几秒钟

- 当无人机旋转时,绿色指示条应向右延伸得越来越远,直到校准完成
- 成功完成后,将发出三声提示音,并出现“请重新启动自动驾驶仪”窗口,切换到其它界面再切换回本界面,查看校准得到的偏移值,如果偏移值为绿色则表示良好(每项偏移量的绝对值<400);黄色为尚可接受(每项偏移量的绝对值<600);红色为且不为零(可能存在磁场干扰)

- 校准完成后,您需要重新启动自动驾驶仪。
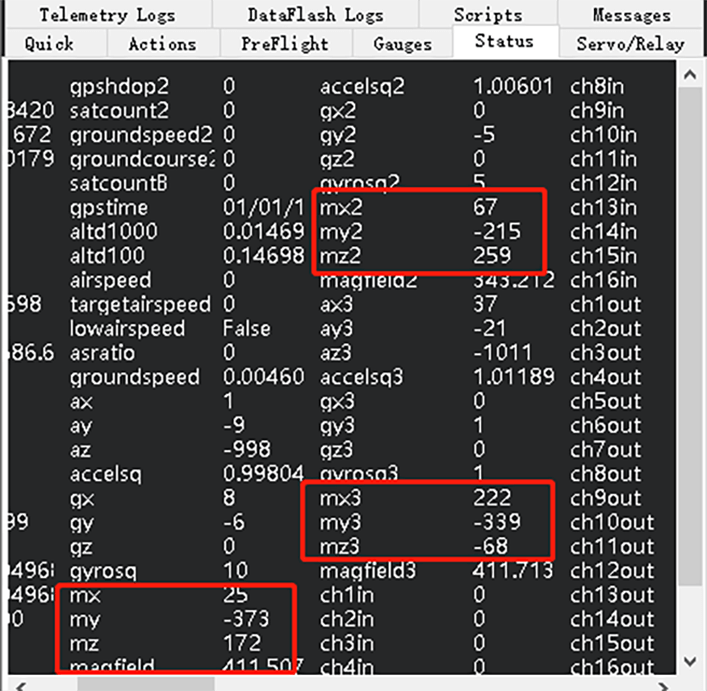
如果校准失败:您会听到故障音,绿色条可能会重置到左侧,并且校准例程可能会重新启动(取决于地面站) 如果在多次尝试后仍无法校准指南针,请按“取消”按钮并将“合格级别(fitness)”下拉列表更改为更宽松的设置,然后重试。 如果指南针校准仍然失败,您可以通过“飞行数据”》状态栏界面,查找可能存在磁场干扰的指南针。指南针校准失败,一般为单个罗盘或多个罗盘存在周围磁场干扰导致,您可以通过查看上图中标识的指南针(mag)数据分析;正常情况下,没有完成指南针校准前,X、Y、Z的数据不超700(不分正负),且波动不超20;如果不符合上述条件即可能是存在持续/不持续的磁场干扰;您可以通过调整罗盘的安装位置或移开干扰源。
使用遥控器触发板载校准(无GCS)
Copter-3.4,Plane 3.4.0和Rover 3.0.0(及更高版本)固件支持“使用 遥控器触发板载校准”,这意味着可以脱离地面站进行指南针校准。
- 请确保已完成遥控器校准
- 将油门杆拨动到最高同时方向杆往右打死;并保持2秒(请在操作时不要解开安全开关)。
- 如果您的自动驾驶仪装有蜂鸣器,您应该听到一声提示音,然后每秒发出一声短促的哔哔声
- 将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下指向地球几秒钟
- 成功完成后,将发出三声提示音,您需要重新启动自动驾驶仪。