自动调谐模式
概述
自动调谐尝试自动调整Stabilize P, Rate P 和D,以及最大旋转加速度,以提供最高的响应,不会出现明显的过冲。 在使用自动调谐模式之前,飞行器“基本上”在定高模式下飞行,因为该功能需要能够在侧倾和俯仰轴上“牵动”飞行器。
飞行前设置
1.将飞行模式开关设置为定高。
注:ac3.5及以上固件添加了悬停模式直接切换到自动调参支持
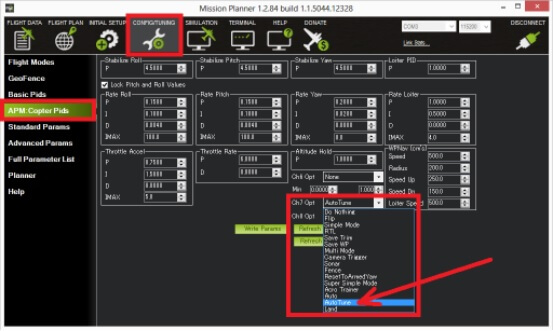
2.将辅助功能开关设置为自动调谐,以使用开关打开/关闭自动调谐
3.拆下相机万向架或其他任何可能在飞行中摆动的框架部分
4.使用AUTOTUNE_AXES参数选择要调谐的轴(Roll,Pitch,Yaw)的组合
5.通过AUTOTUNE_AGGR参数设置自动调谐的响应性(0.1 = 强烈,0.075 = 普通,0.050 = 微弱),通常以默认值0.1开始。
6.对于大型直升机(直径至少为13英寸或33厘米),将速率Roll和Pitch滤波器设置为10hz(在直升机3.3中,RATE_RLL_FILT_HZ和RATE_PIT_FILT_HZ在Copter-3.4中为ATC_RAT_RLL_FILT,ATC_RAT_PIT_FILT)
7.建议启用PID增益的电池电压调节
如何调用自动调谐
1.挑一个天气好的日子,去一个开阔的地方
2.确保ch7或ch8开关处于低位。
3.在合适的高度起飞并将直升机设置为定高模式。
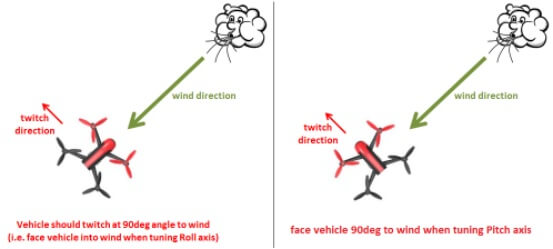
4.面向飞行器,使其从风吹的方向开始变为90度(即,首先调整Roll,将飞行器指向风中)
5.将ch7 / ch8开关置于HIGH位置以进行自动调谐:
你会看到它大概以20度向左右颤动几分钟,然后会反复向前和向后。
任何时候都可以使用Roll和Pitch来重新定位直升机,如果它偏离(它将在重新定位和测试之间使用原始的PID增益)。 当你释放控制杆时,它会继续自动调整停止的位置。
随时将ch7 / ch8开关置于LOW位置,关闭自动调谐并返回原始PID。
确保您的变送器上没有任何装饰线,否则自动调谐可能无法得到控制杆居中的信号。
6.当调谐完成时,直升机将恢复原来的PID增益
7.将ch7 / ch8开关置于LOW位置,然后返回HIGH位置,以测试调谐PID增益。
8.将ch7 / ch8开关置于LOW位置,使用原始PID增益飞行。
9.如果您对自动调谐PID增益感到满意,请将ch7 / ch8开关置于HIGH位置,着陆和撤防以永久保存PID。
如果您不喜欢新的PIDS,请将ch7 / ch8切换为低电平以返回原始PID。 撤防时,结果不会被保存。
如果您在执行自动调谐后发现飞行器在自稳,定高或定点模式(但是在更自主的模式下,如悬停模式,返回启动模式,自动模式)中过分抽搐,请尝试将RC_FEEL参数降至0.25。 或者尝试减少AUTOTUNE_AGGR参数(应始终在0.05到0.10之间),然后重试。
如果自动调谐后飞行器变得迟钝,请尝试将AUTOTUNE_AGGR参数增加到0.10,再次尝试自动调谐。
使用定点模式调用自动调谐模式
在Copter-3.5(及更高版本)中,如果从悬停或定点飞行模式调用(与定高相反),自动调谐模式的位置保持将较为微弱。
飞行器将轻轻地倾斜(最多10度)朝向最初设置为飞行器位置的“目标点”,此时自动调谐模式被调用。
飞行员可以使用Roll,Pitch,Yaw或油门杆来重新定位飞行器。 目标位置将在飞手释放Roll和Pitch杆时重置到飞行器的位置。
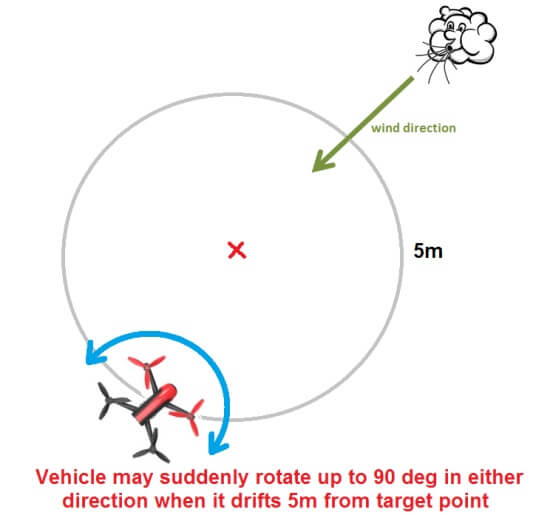
为了垂直于风向抽搐,当飞行器从目标位置漂移5米(或更多)时,飞行器可能会以任何方向突然转动90度。
如果风很微弱或没有风,对飞行器进行轻微的位置控制可能会导致它来回移动,每次距离目标超过5米时,飞行器在目标点周围改变偏航。 在这些情况下,还原更简单的基于AltHold的自动调谐可能更舒适。
补充说明
在Copter-3.3(及更高版本)中,自动调谐可以设置为飞行模式。 进入或退出自动调谐飞行模式的响应与升高或降低自动调谐功能的ch7 / ch8辅助开关相同。
如果飞行器的电池电量不足以完成所有轴的调整,AUTOTUNE_AXES允许控制要调整的轴是非常有用的。 “1”=调整Roll,“2”=调节Pitch,“4”=调节Yaw。 将这些数字加在一起在单个会话中调整多个轴(即“7”=调整所有轴)
AUTOTUNE_AGGR:应在0.05到0.10的范围内。 越高的值会产生越明显的调谐,但有时也会导致增益太高。 更具体地说,该参数控制D项反弹和P项过冲的阈值。 这会影响调谐噪声抗扰度(越高的值越能改善帧中的弯曲或其他可能引发调谐算法的干扰)。 但是较高的值也会影响拒绝外部干扰的调整,而较低的值会对导致导频输入更为敏感的音色。
自动调谐可能更新的参数完整列表
转角P增益ATC_ANG_RLL_P(在AC3.3:STB_RLL_P)
Roll速率P,I和D增益ATC_RAT_RLL_P,ATC_RAT_RLL_I,ATC_RAT_RLL_D(在AC3.3:RATE_RLL_P,RATE_RLL_I,RATE_RLL_D)
Roll最大加速度ATC_ACCEL_R_MAX
Pitch角P增益ATC_ANG_PIT_P(在AC3.3:STB_PIT_P)
Pitch速率P,I和D增益ATC_RAT_PIT_P,ATC_RAT_PIT_I,ATC_RAT_PIT_D(在AC3.3中:RATE_PIT_P,RATE_PIT_I,RATE_PIT_D)
Pitch最大加速度ATC_ACCEL_P_MAX
Yaw角P增益ATC_ANG_YAW_P(在AC3.3:STB_YAW_P)
Yaw速率P,I获得ATC_RAT_YAW_P,ATC_RAT_YAW_I,ATC_RAT_YAW_D(在AC3.3:RATE_YAW_P,RATE_YAW_I,RATE_YAW_D)
Yaw速率滤波器ATC_RAT_YAW_FILT(在AC3.3:RATE_YAW_FILT_HZ)
最大加速度ATC_ACCEL_Y_MAX
Roll和Pitch轴速率前馈已启用(ATC_RATE_FF_ENABLE)
调整好之后,您可能希望将ATC_THR_MIX_MAX(或PC-3.3中的MOT_THR_MIX_MAX)增加到0.9(默认为0.5),以增加对节气门控制的姿态控制优先级。 如果在执行快速向前飞行后飞行器突然减速,则可以减少定高模式中有时看到的过大Pitch值(特别是带有大型螺旋桨的直升机)。 在这种情况下,风力在提供升降的螺旋桨下捕获,但也会扰乱飞行器的姿态,导致油门和姿态控制之间产生冲突。 增加该参数值的危险在于,如果速率增益升得太高使得飞行器振动很大,则可能导致飞行器难以下降(因为它会优先校正姿态振荡,不会充分减少油门)。
自动调谐可以发出巨大和快速的变化请求输出到电机,这可能会导致电机同步问题,特别是使用SimonK固件或低KV电机(500KV以下)时。
自动调谐有时无法为振动阻尼非常柔软的飞行控制器或机臂匹配合适的调谐。
为了获得最佳效果,直升机不应建立太多的水平速度。 可以通过在测试(抽搐)之间进行快速校正来阻止车辆飞行太快而被防止。
建议自动调谐从自稳模式中进行操作,在切换到定高模式之前不要突然翻转自动调谐开关。
常见问题
处于自动调谐模式,但是飞行器没有开始调谐(即不会颤动),y原因很可能是Roll,Pitch,Yaw或油门杆没有完全在中间。 通过将RC1_DZ,RC2_DZ,RC3_DZ和RC4_DZ增加到50(或更高),可能有助于增加RC输入端的死区。
如果自动调谐使飞行器产生过大的抽搐,请尝试减少AUTOTUNE_AGGR参数(不得低于0.05),然后再次执行自动调谐。
如果自动调谐使飞行器反应迟钝,尝试增加AUTOTUNE_AGGR参数(不能高于0.1),并再次执行自动调谐。