遥控器失控保护(无线电丢失保护)
在飞行员的遥控器发射器与自动驾驶的接收机之间失去联系的情况下,Copter支持几种可配置的故障安全选项。本页说明此故障保险的设置和测试。请注意,“无线电(遥控器)故障安全”以前称为“油门故障安全”,因为某些接收器使用油门通道来发出失去联系的信号。
Copter还支持其他故障保险,包括:电池,地面站和EKF /DCM故障保险。有关更多详细信息,请参见故障保护。
RC接收机油门失控原理:
一般遥控器接收机都有油门失控功能,就是当接收机接收不发发射机过来的信号时,油门通道(第三通道)会自动切换到一个低于1000 PWM的值(例如950)。飞控板读取到第三通道为950值的时候,就认为RC遥控器已经失控,从而切换对应的保护模式:如 RTL返回起飞点或者AUTO自动继续飞行
故障保险何时触发
如果启用并正确设置,则无线电故障安全将在以下情况下触发:
- 飞行员关闭遥控器发射器
- 无人机行驶距离超出遥控器通信距离
- 飞行员将油门通道从遥控器发射机强制降至FS_THR_VALUE以下
- 接收机断电(不太可能)
- 将接收器连接到自动驾驶仪的电线断开(不太可能)。
会发生什么
触发无线电故障安全保护后,无人机将执行先前设置好的操作;比如不执行任何操作,立即降落,RTL或SmartRTL(返航/智能返航)。还可以将其配置为自动航线时绕过故障保护,继续执行航线,或者如果已经处于降落阶段则继续降落。
- 如果多旋翼已经锁定,则不会执行故障保护。
- 如果多旋翼已经解锁但已落地,则将立即上锁。
- 如果多旋翼在稳定或Acro模式下解锁,并且油门输入最小,则直升机将上锁。
- 否则,直升机将按照以下参数进行配置。
如果故障安全清除(即遥控器发射机和接收机重新建立通信),多旋翼将保持其故障安全模式。它不会自动返回到触发故障保险之前激活的飞行模式。这意味着,例如,如果在发生故障保险时无人机处于Loiter中,并且飞行模式自动更改为RTL,即使在发射机和接收机重新建立通信,无人机仍将保持RTL状态。如果飞行员希望在Loiter中重新取得控制权,则需要通过遥控器发射机进行模式切换,然后再回到Loiter。
接收机配置
默认情况下,如果失去与发射机的联系,大多数新购买的接收器将仅不输出脉冲。但是,某些低端接收器将被设置为仅将所有通道保持在其最后一个已知位置。这不是很好,因为自动驾驶仪无法知道飞行员已失去对无人机的控制。取而代之的是,必须将接收器设置为向自动驾驶仪发出信号,告知其已失去联系,并且可以通过两种方式执行此操作(方法取决于接收器)。每个品牌的发射器/接收器都略有不同,因此请参阅发射器的用户手册,以确定可用的方法以及如何设置。
配置失控后接收机输出低油门
所谓“低油门”就是当遥控器接收机与发射机失去联系,接收机输出低于正常情况下最低油门的值。
配置办法:
- 在设置前请记录最小油门值,以方便后面的恢复。
- 打开遥控器发射机失控保护界面》将飞控连接到地面站并打开遥控器校准界面。
- 通过微调按钮将油门最小值设置为您期望失控后输出的油门值。
- 开启油门失控保护,遥控器发射机将记录失控时油门值。
- 通过微调按钮将油门最小值恢复到初始值。
- 最后将FS_THR_VALUE设置为于失控油门值,小于正常的最小值
配置失控后接收机无信号输出
“无信号输出” -接收机停止向自动驾驶仪发送信号。这是首选方法,也是大多数现代FrSky接收器的工作方式。以下是带有FrSky D4R-II接收器的FlySky 9通道发送器的设置方法,该方法使用“无信号输出”方法;触发失控保护。
参数配置
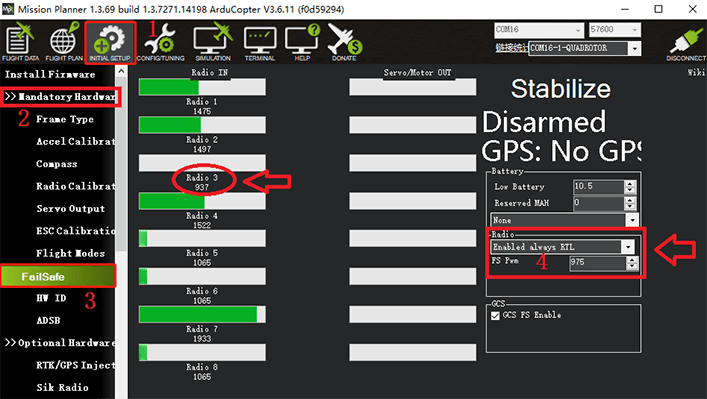
FS_THR_ENABLE(启用油门失控)参数可以在任务规划完整的参数列表或全参数树进行设置,或者也可以在Misssion planner地面站》初始设置》必要硬件》故障保护界面设置。
- 禁用(值为0)将完全禁用无线电故障安全。
- 始终RTL(值为1);触发后将切换到RTL模式。如果无法使用GPS位置,则无人机将改为降落模式降落模式。
在自动模式下继续执行任务(在4.0+中已弃用)(值为2);将忽略自动模式任务中的故障保险。否则,其行为将与始终RTL相同。此选项在ArduCopter 4.0中不再存在。而是,请参阅FS_OPTIONS参数此函数。在Copter 4.0及更高版本中设置此值将被自动转换并设置为(值1),并且FS_OPTIONS将被修改为在位掩码中包含位(0),以表示“如果在Radio Failsafe上处于自动模式,则继续”。
启用始终降落(值为3)会将直升机切换到降落模式。
启用的SmartRTL或RTL(值4)会将直升机切换到SmartRTL模式。如果SmartRTL不可用,则直升机将改为切换到RTL模式。如果无法使用GPS位置,则直升机将改为使用降落模式。
- SmartRTL或Land(值5)会将直升机切换到SmartRTL模式。如果SmartRTL不可用,则直升机将改为切换到降落模式。
- 任何无效值(例如意外输入99作为参数值)将与始终降落相同。
FS_THR_VALUE 参数可以在任务规划完整的参数列表或全参数树进行设置,或者也可以在Misssion planner地面站》初始设置》必要硬件》故障保护界面设置。
至少要比您的通道3最低的pwm值高10;
FS_OPTIONS参数(在直升机4.0和更高版本中添加)是位掩码参数来选择修改无线电,GCS,和电池故障安全的标准动作的一个或多个选项。在Mission Planner完整参数列表或完整参数树中,方便的复选框弹出窗口可轻松设置此(以及任何其他位掩码)参数。请将地面站升级到1.3.69或以上版本以首先获取最新的参数定义。
FS_OPTIONS位如下:
第1位掩码:如果在无线电故障保护上处于自动模式,则继续。
第2位掩码:如果在地面控制站的故障保护上处于自动模式,则继续。
第3位掩码:如果指引模式时无线电故障,则继续。
第4位掩码:如果进入任何故障保险,则继续
第5位掩码:继续在地面控制站进行引导控制
如果未设置上述任何一项,则按配置执行FS_THR_ENABLE选项。
只有位掩码位0、2和3会影响无线电故障安全期间采取的措施。此参数还可以与电池和GCS故障保护一起使用,因此请确保在设置此参数时将所有选项都考虑在内。
下面是Mission Planner初始设置>>必要硬件>> Failsafe菜单的屏幕截图。
测试失控保护
您可以在连接电池的情况下完成这些测试,但是如果要连接电池,则应先卸下螺旋桨。
测试#1:失控保护触发机制
- 如果使用“低油门触发”方法,请确保关闭遥控器后,接收机会输出低于最小油门的值(失控后,接收机输出的失控值)。
确保遥控器发射机已打开并且在遥控器校准界面能显示遥控器信号(以检查遥控信号是否正常),将切换到自稳模式。
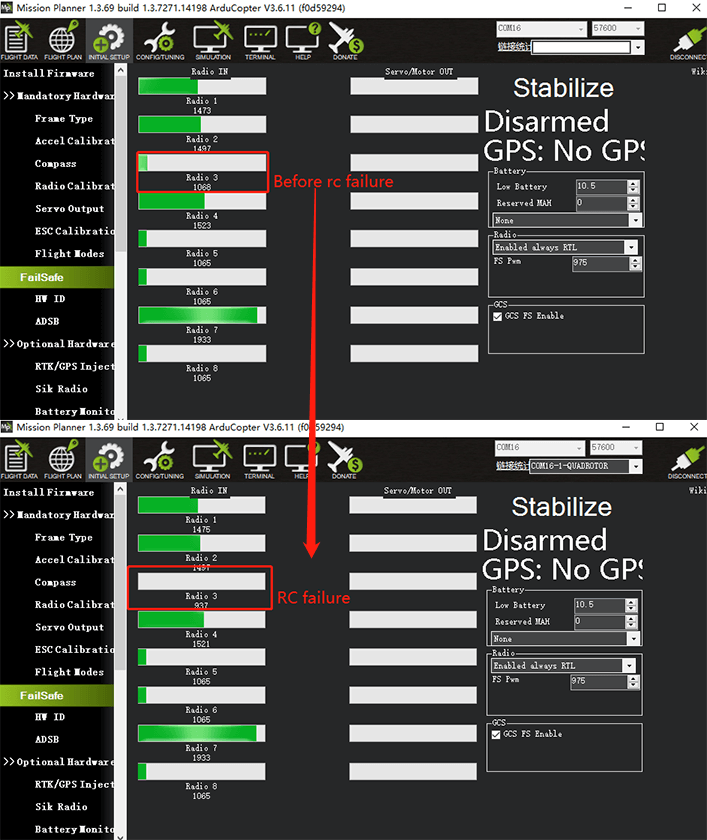
油门(通道3)的PWM值应大致与下面的第一个图所示相同。它的值可以更高或更低,但肯定比FS_THR_VALUE高10个单位。
关闭遥控器发射机,油门PWM值应至少低于FS_THR_VALUE(如下面的第二个图所示)10个单位。
您可以选择下方的一个/多个测试场景进行功能验证。
测试#2:当油门处于0时且飞行模式处于稳定或ACRO;马上自动上锁,锁定电机。
- 切换至稳定模式,遥控器解锁电机,同时将油门保持在最低。
- 关闭遥控器,电机应立即被锁定(停止转动)
- 红色指示灯将开始闪烁,“已锁定”将显示在MP的“飞行数据”屏幕中。
测试#3:当油门高于0时将飞行模式更改为RTL或LAND
- 切换到稳定模式,控器解锁电机,同时将油门升高到中位。
- 关闭遥控器。如果无人机已经有可用的GPS定位,则飞行模式应切换为RTL;如果无人机没有获得GPS定位或者定位不好,则飞行模式应切换为LAND(飞行模式和GPS锁定状态在MP的飞行数据屏幕中可见)。
测试#4:遥控器通信恢复后重新获得控制
- 从测试3继续进行,重新打开发射机
当飞行模式仍处于RTL或LAND且已解锁时,将飞行模式开关更改到另外一个位置(切换模式),然后再回到稳定模式。
故障保护页面上显示的飞行模式正在实时更新。
测试5(可选):断开接收器的电源
- 切换至稳定模式,遥控器解锁电机,并使油门保持在零以上。
- 小心断开将接收器连接至自动驾驶仪的电源线
- 如测试#3中所述,飞行模式应切换为RTL或LAND。
通过接收机检测失控后直接输出切换模式指令。
一般用户严禁使用这种方案;并且使用时请确保飞控未启用遥控器失控保护。
- 将接收器失控保护设置为通道5(飞行模式通道);
- 当失控时,接收机第五通道输出RTL模式对应的PWM值;飞控将进行模式切换到RTL(飞控并不知道已经失控了,只是根据您这个PWM进行模式切换,跟您平时切换飞行模式一样)。
尽管这种方法对于某些场景下有用,但不建议这样做;因为在这个过程中飞控并不知道已经失控,所以并不会提示您遥控器已经失控了;并且如果接收机掉电或接收机与自动驾驶仪之间的电线断开,并不会触发这个机制。