震动分析和测试
概述
飞控板对于震动是非常敏感的,因为飞控是靠加速计(融合气压计\GPS)的数据去计算飞机的姿态
严重的震动可能导致飞控板姿态、高度估算和解算异常,导致飞行效果不好甚至炸鸡
严重影响的模式主要有(AltHold, Loiter, RTL, Guided, Position and AUTO)
下面讲解如何测量和分析震动水平,如果你发现震动超标了,你应该尝试解决震动问题,这很重要,将是飞行效果好不好的前提。
一般震动来源:机架太软、马达不平衡、螺旋桨不平衡 这几个主要因素
Copter 3.3及以后版本的测量方法
- 把飞行器按常规方法飞行一段时间,不要太温柔(也不要太暴力),至少飞行几分钟,然后下载日志(.bin文件)
- 使用MP地面站加载.bin文件的日志文件
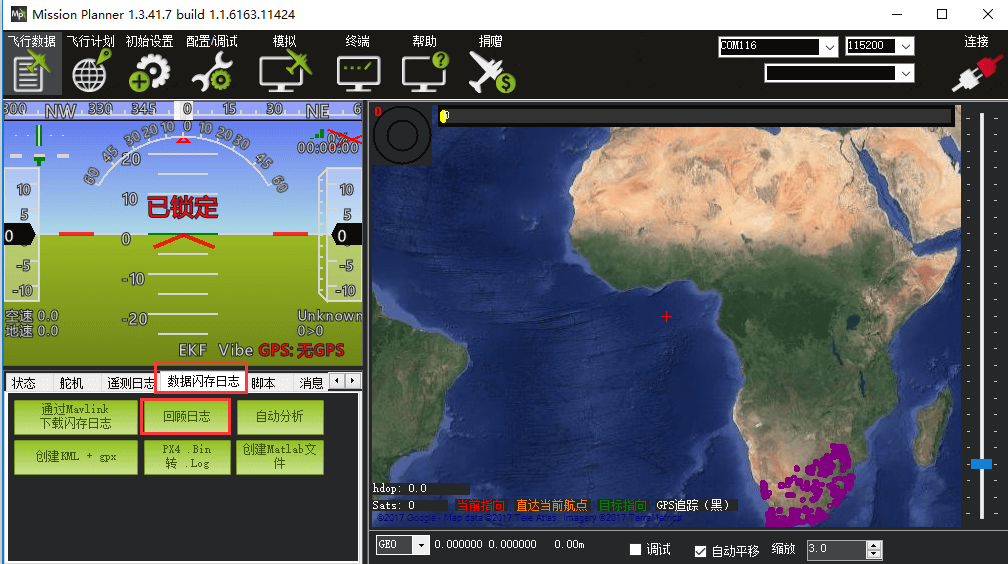
- 使用地面站或其他GCS图形VIBE消息的VibeX,VibeY和VibeZ值。 这些显示了主加速度计输出的标准偏差(m / s / s)。 来自3DR IRIS的以下图像显示低于15m / s / s但偶尔达到30m / s / s的正常水平。 最大可接受值似乎低于60m / s / s(见下图)。
4.绘制每当加速度计之一达到其最大极限(16G)时,Clip0,Clip1和Clip2值增加。 理想情况下,对于整个飞行而言,这些值应为零,但是如果在硬着陆时出现低数字( 低于100),则可能会很好。 通过日志定期增加数字表示应该有待修复的严重振动问题。
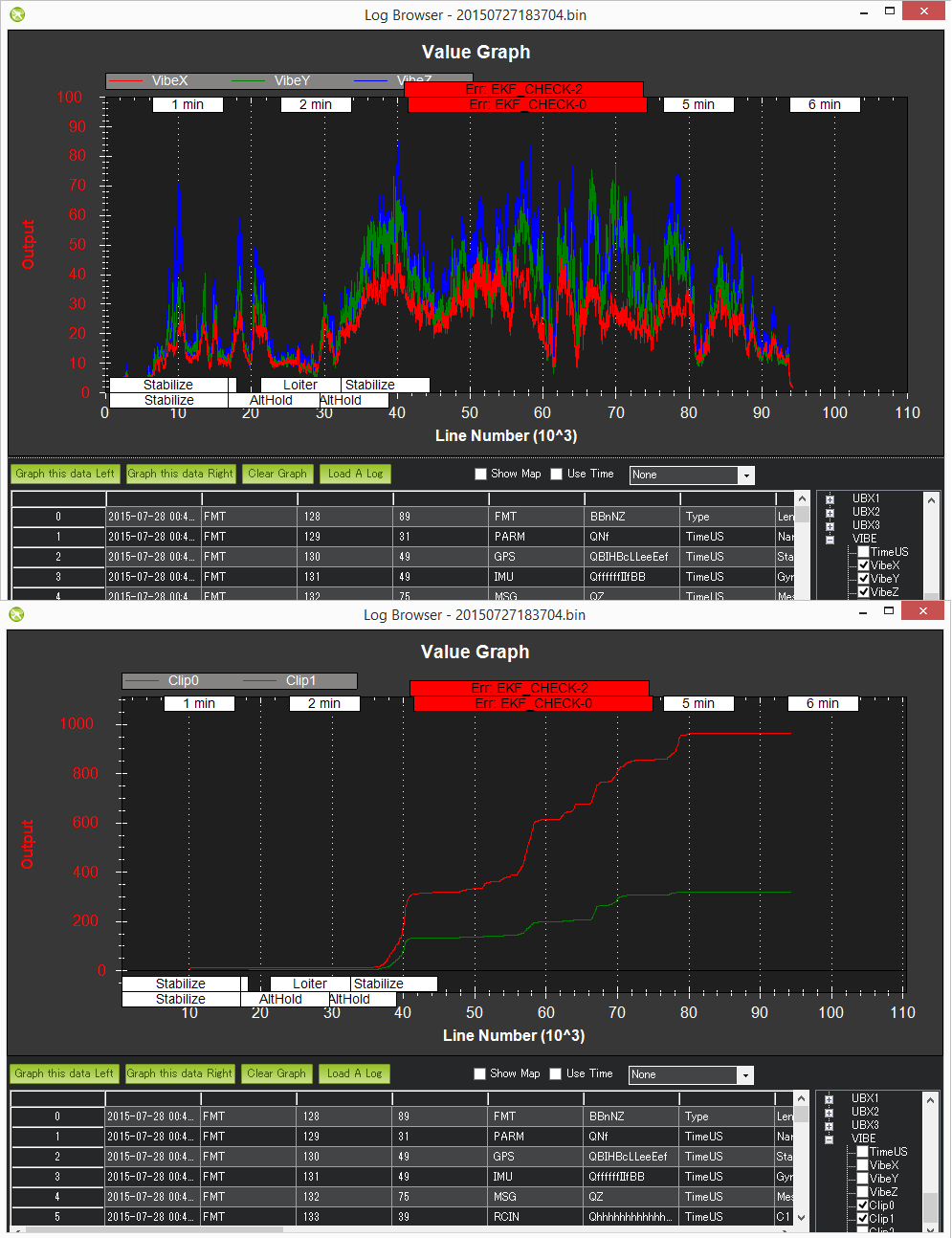 这是由于高振动而具有位置估计问题的飞行器的示例。
这是由于高振动而具有位置估计问题的飞行器的示例。
用于计算振动水平的算法可以在AP_InertialSensor.cpp的calc_vibration_and_clipping()方法中看到,但简而言之,它涉及计算加速度计读数的标准偏差,如下所示:
捕获来自主IMU的原始x,y和z加速度计值
高通滤波器在5hz的原始值以移除飞行器的运动,并为x,y和z轴创建一个“accel_vibe_floor”。
计算最新加速度值和accel_vibe_floor之间的差异。
平方上述差异,过滤2hz,然后计算平方根(x,y和z)。 这些最后三个值是VIBE msg的VibeX,Y和Z字段中出现的值。