返航模式
返航(RTL,return to launch)模式飞行器会从当前位置飞到home点上方悬停。 返航模式的行为由几个可调参数来控制。
概述
当切换到返航模式时,飞行器会返回到“home”点。 默认情况下,在返航之前,飞行器会首先飞到至少15米的高度,如果当前高度更高,就会保持当前高度。
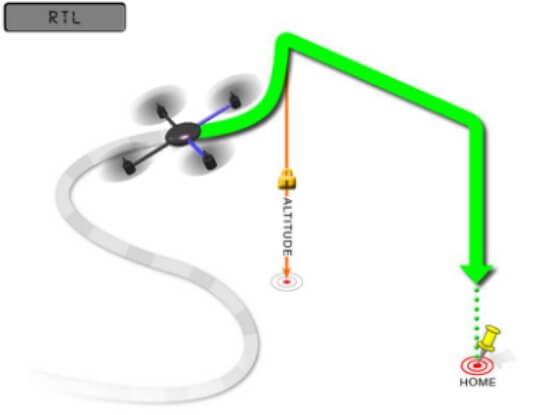
返航是依赖于GPS的动作,所以在尝试使用此模式之前,必须先完成GPS定位。 在解锁之前,确保APM的蓝色LED灯是常亮的而且不闪烁。 对于没有罗盘的GPS,当GPS完成定位时蓝色LED灯将会常亮。 对于GPS+罗盘模块,当GPS完成定位蓝色LED灯将会闪烁。
返航将命令飞行器回到“home”点,换句话说就是它会返回解锁时的位置。 因此,“home”点应始终是飞行器的GPS实际起飞位置,没有障碍物并且远离人群。 对于APM:Copter,如果GPS获得定位,然后解锁飞行器,“home”点是当飞行器解锁时的位置。 就是说如果你在APM:Copter中执行返航,它将返回它解锁时的位置。
注意:
在返航模式下,飞行控制器使用气压计测量空气压力决定高度(“压力高度”),如果飞行区域的空气压力发生变化,则飞行器将跟随气压(而不是实际高度 )改变高度(除非你安装并启用了声纳在离地6米以内飞行)。
选项(用户可调整参数)
RTL_ALT:飞行器返航之前的最低高度。
设置为零以当前高度返回。
可以设置的返回高度在1到8000厘米之间。
默认返回的高度为15米(1500)
RTL_ALT_FINAL:在返航的最终阶段或是完成一个任务之后,飞行器将会到达的高度。
设置为零飞行器将会自动着陆。
最终的返回高度可以从0到1000厘米之间调整。
RTL_LOIT_TIME:在最终下降之前,在“home”点上方悬停的时间,以“毫秒”为单位。
- 悬停时间可以从0到60,000毫秒之间进行调整。
WP_YAW_BEHAVIOR:设置自动驾驶仪在任务和返航期间如何控制“Yaw”。
0 =永不改变Yaw。
1 =机头朝向下一个航路点,或是对于返航,机头朝向“home”点。
2 =机头背对下一个航路点,或是对于返航,机头背对“home”点。
LAND_SPEED:最终着陆阶段的下降速度,以厘米每秒为单位。
- 着陆速度可调范围为20至200厘米每秒。
注意:
其他导航设置也对RTL模式有影响:
WPNAV_ACCEL
WPNAV_SPEED_DN
WPNAV_SPEED_UP
要使用返航,需要使GPS定位(蓝色GPS LED和蓝色APM LED常亮不闪烁)以便在解锁和起飞之前,建立“home”点或起飞位置。
注意UBLOX GPS模块在搜星时LED是灭掉的,而当搜到星时,LED会闪烁。
着陆并再次解锁飞行器,将会重置“home”点,这是在飞场飞行时一个很棒的功能。
如果您在飞行中时第一次获得定位,“home”点会被设定为定位时的位置。
如果将RTL_ALT设置为0以外的数字,它会在返回时达到并保持这个高度。
返航使用WPNAV_SPEED来决定返回时有多快。
一旦飞行器到达“home”点,飞行器会进入悬停模式,延时(AUTOLAND)这么长时间,然后降落。
要停止自动着陆,只要简单地使用控制开关改变模式清楚着陆计时,即可恢复正常飞行。
当返回或是在“home”点上方悬停时,油门摇杆控制高度,而不是直接控制电机。