地面站故障保护
在Copter-4.0及更高版本中,地面控制故障保险已进行了重大改进。
如果无人机失去与GCS的联系,无人机将采取反应(如果开启)。GCS故障安全监视从GCS发出最后一次mavlink心跳起的时间算起,如果在5秒内未收到任何心跳包信号,则将根据您的参数设置触发GCS(地面站)故障保护。
如果未连接任何GCS(地面站),则无论参数设置如何,GCS(地面站)故障保护都将保持睡眠状态。
故障保护何时触发
以下情况会导致GCS mavlink心跳丢失,并在5秒后触发GCS故障安全事件:
- 操作员关闭或断开GCS的连接
- 直升机的行程超出了GCS遥测无线电(数传)的范围
- 两端的GCS遥测无线电断电
- 将GCS遥测无线电连接到自动驾驶仪或地面设备的电线断开
将会发生以下操作:
触发无线电故障安全保护后,无人机将执行先前设置好的操作;比如不执行任何操作,立即降落,RTL或SmartRTL(返航/智能返航)。还可以将其配置为自动航线时绕过故障保护,继续执行航线,或者如果已经处于降落阶段则继续降落。
- 如果无人机已锁定,则不会触发故障保护。
- 如果无人机已解锁但还在地上,则立即上锁。
- 如果无人机在稳定或Acro模式下解锁,并且油门输入最小,则立即上锁。 否则,直升机将按照以下参数进行配置。
如果触发了GCS故障保护后,GCS又重新连接上了,无人机将保持故障保护模式(如RTL),如果你想夺回飞机控制权,你需要手动切换到你想要的模式。
设置GCS丢失保护:
在地面站--配置调试--全部参数列表 FS_GCS_ENABLE参数
- 0是禁用GCS保护
- 1 始终RTL(返航);如果无良好的GPS定位则使用降落模式
- 2 当前模式为AUTO,会继续完成飞行任务计划(在4.0+中已弃用),否则执行RTL返航模式(该选项在ArduCopter 4.0中不再存在。而是,请参阅FS_OPTIONS参数此函数。在Copter 4.0及更高版本中设置此值将自动转换并设置为值1(始终为RTL),并且FS_OPTIONS位掩码将被修改为包括用于“在GCS故障保护上继续自动模式任务”的位(1)。
- 3 SmartRTL或RTL;会将直升机切换到SmartRTL模式。如果SmartRTL不可用,则直升机将改为切换到RTL模式。如果GPS位置不可用,则直升机将改为使用陆地模式。
- 4 **始终land(降落)
- 5 任何无效值(例如意外输入99作为参数值)将与Enabled Always RTL相同。
FS_OPTIONS参数(直升机4.0和更高版本)是位掩码参数来选择修改无线电,GCS,和电池故障安全的标准动作的一个或多个选项
- 第0位:如果在无线电故障保护上处于自动模式,则继续
- 第1位:如果在地面控制站的故障保护上处于自动模式,则继续
- 第2位:继续如果导模无线电故障安全
- 第3位:如果在任何故障保护上着陆,则继续
- 第4位:继续进行地面控制站故障保护的先导控制 如果未设置上述任何一项,请按照配置执行FS_GCS_ENABLE选项。
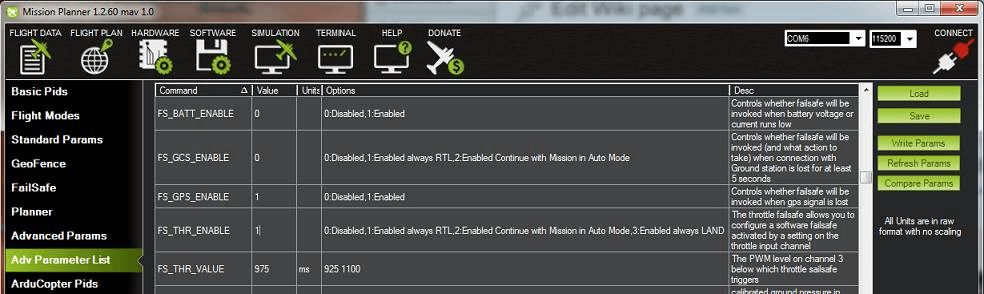
可以从任务计划器的“高级参数列表”中观察或设置所有故障安全参数。