降落模式
降落模式可让飞行器垂直下降,而且具有这些特性:
下降至10m的过程中(或是直到声呐检测到了飞行器下面有东西之前)使用常规定高控制器,通过WPNAV_SPEED_DN参数限制下降速度,可通过Mission Planner修改,在Config/Tuning(配置/调试) > ArduCopter Pids(扩展调参)界面。
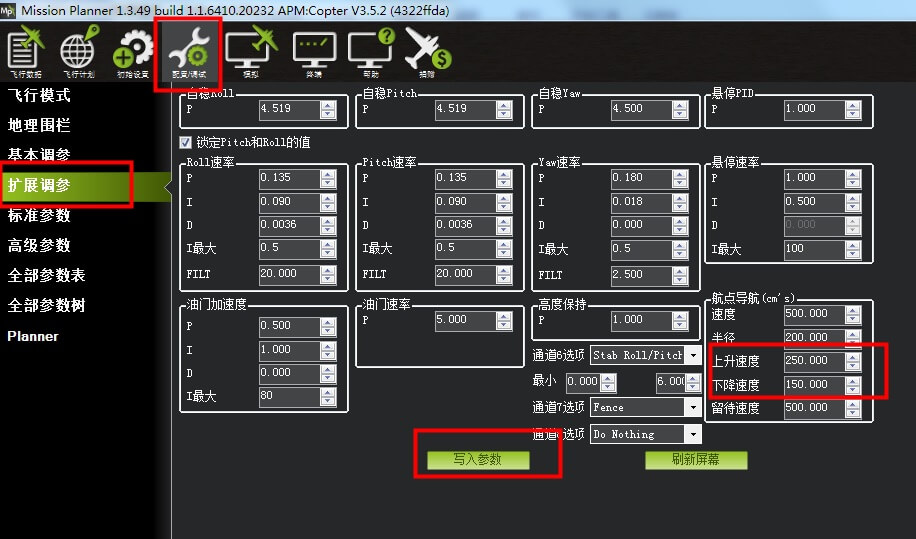
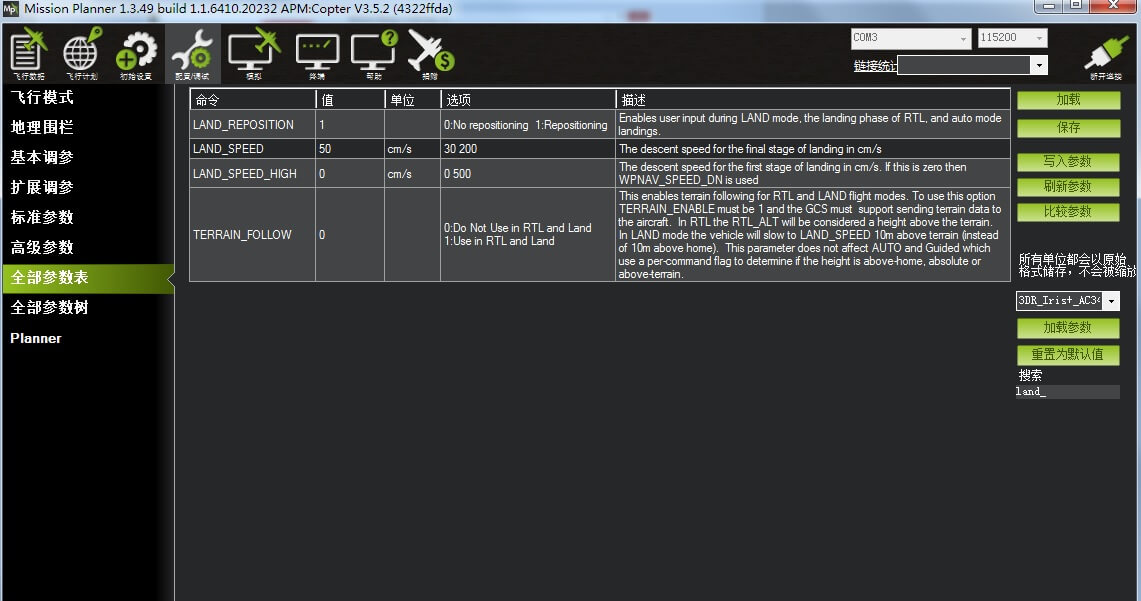
在10m内,飞行器会以LAND_SPEED参数规定的速率下降,默认为50cm/s。
- 一到达地面,如果飞手的油门位于最低,飞行器就会自动关闭电机并锁定飞行器。
注意: 如果电机转速最小且爬升速率仅有-20cm/s至+20cm/s,一秒钟后APM:Copter就会识别为已降落。 它不是用高度判断是否关闭电机,除非飞行器低于家的高度10m多。
如果在落地或者关掉螺旋桨之前,飞行器出现上跳或像气球一样回升的话,尝试降低一点LAND_SPEED参数。
如果模型的GPS已经定位,降落控制器会尝试控制它的水平位置,但是飞手可以调整目标水平位置,就像是在悬停模式一样。
如果模型的GPS并没有定位,水平控制的工作方式就会像是在自稳模式一样,但是飞手可以操控飞行器roll和pitch的倾斜的角度。
警告!
在任何基于高度保持的模式中,包括: 高度保持、悬停、自动、自动降落、回家,当你的飞行器接近地面或者降落时,如果飞行器的运行变得很不稳定(或是自动降落过程中有跳动,或者降落后不能正确的关闭电机)。这是因为因为飞行器螺旋桨的气流与地面作用会产生压力,在此位置,你的飞控的气压计(高度计)可能会受到影响。
这很容易识别出来,只要看一下记录中的高度计读数,看看在接近地面时是否有峰波或是震荡。
如果有这个问题,将飞控移出受螺旋桨气流影响的地方,或是用通风的外壳罩住它。
可以通过飞行测试或是日志记录的结果判断是否成功。