EKF故障安全
EKF故障安全监控EKF(位置和姿态估计系统)的运行状况,以发现无人机的位置估计问题(通常由GPS故障或指南针错误引起)并防止“飞越”。
从Copter 3.3开始,EKF故障安全取代了GPS故障安全。
什么时候触发?
当指南针,位置或速度的任意两个EKF“方差”高于FS_EKF_THRESH参数值1秒钟时,将触发EKF故障安全。
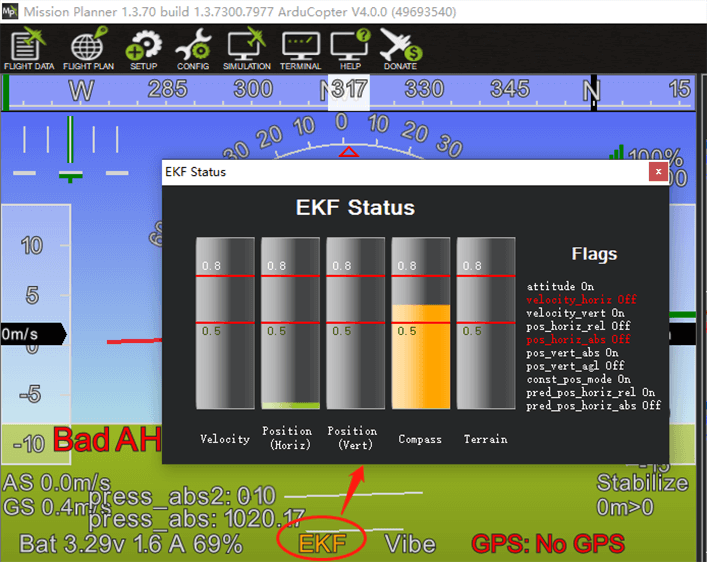
这些“差异”来自EKF本身,并且这些数字表明EKF估算的可靠性。值介于0和1之间,其中0表示估算值非常可靠,而1.0则非常不可靠。
EKF通过比较多个传感器的结果来计算这些“差异”。因此,例如,如果GPS位置突然跳动,但加速度计未显示出突然的加速度,则位置的EKF方差将上升(即,估算变得不太可靠)
这些变化可以在地面站上实时查看。如果使用Mission Planner,请单击HUD上的“ EKF”标签。
故障安全触发时会发生什么?
- 自动驾驶仪的LED将闪烁红黄色或蓝黄色,并且会发出声音警报
- 如果已连接数传,则“EKF方差”将出现在地面站的HUD上
- 在手动飞行模式下(例如,稳定,Acro,AltHold),飞控将不会进行任何操作,但是飞行员将无法切换到自主飞行模式(Loiter,PosHold,RTL,Guided,Auto),直到故障消除
- 在需要自动模式下(即Loiter,PosHold,RTL,Guided,Auto等),FS_EKF_ACTION控制行为。默认情况下,该值为“ 1”,表示无人机将切换到降落(懒得)模式。这是一个“飞行员控制”的降落,这意味着飞行员可以控制侧倾角和俯仰角,但无人机将以LAND_SPEED设置值下降。它将降落到地面并自动上锁。
- EKF故障安全错误将被写入数据闪存日志
- 发生EKF故障保险后,飞行员可以在手动飞行模式(例如AltHold)中重新采取控制(使用飞行模式开关)以将无人机控制返航。
调整故障安全的灵敏度
FS_EKF_THRESH参数可以调节ekf故障的灵敏度
- 设置为0则禁用故障保护
- 设置为0.8到1.0之间的值,可以降低触发EKF故障保护的概率;数值越大对EKF要求越低,可能会导致罗盘或GPS故障时延时大,导致飞行器飞行偏离越远。
- 设置为0.6,提高EKF的严格性。降低此值的可能会导致EKF故障安全措施可能会在激进机动期间触发LAND。
Dataflash Log(闪存日志)示例
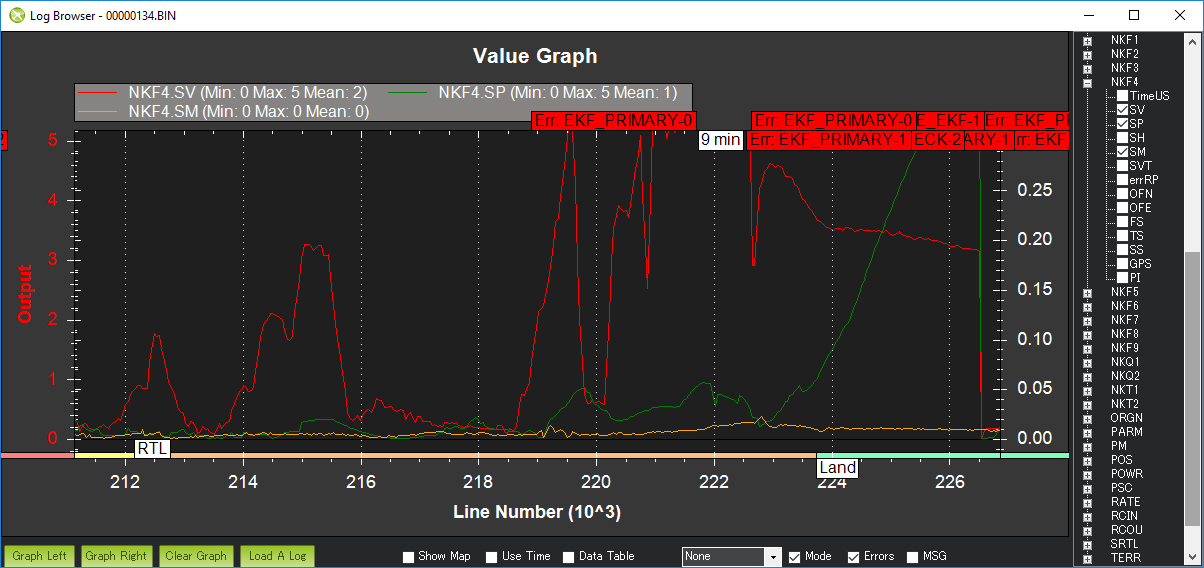
可以通过绘制数据闪存日志的NKF4.SP(位置新息),NKF4.SV(速度新息)和NKF4.SM(罗盘新息)值的图表来查看EKF的创新。
下图显示了在实际EKF故障安全事件期间EKF在位置(绿色),速度(红色)和指南针(黄色)方面的新息。在此事件期间,外部干扰(可能来自附近的高功率无线电塔)导致GPS报告了不准确的位置和速度。速度和位置创新均超过FS_EKF_THRESH值0.8之后,车辆立即切换到降落模式。