电池/电源模块设置
该主题解释了如何进行电源设置
概述
电源设置的目标是提供对剩余电池百分比(和容量)的良好估计,以便防止飞机因电力耗尽而坠毁(或电池因深度放电而损坏)。
PX4提供了许多(逐步更有效)的方法,可用于估计容量:
- 基本电池设置(默认值):将原始测量电压与“空”和“满”电压之间的范围进行比较。 这样的估计较为粗略,因为测量的电压(及其相应的容量)将在负载下产生波动。
- 基于电压的负载补偿估计:抵消负载对电池容量计算的影响。
- 基于电流积分的电压估计:通过基于电流的已消耗电荷估计,对基于负载补偿电压的估计出的可用容量进行补充。 这样的容量估计相当于智能电池的容量估计。
后来的方法建立在前面的方法上。 您使用的方法取决于飞机的电源模块是否可以测量电流并且精度受制于电流测量精度。
以下说明涉及电池1的校准参数:
BAT1_*。其他电池使用BATx_*参数,其中x是电池编号。此处列出了所有电池校准参数.
基本电池设置(默认)
基本电池设置将PX4配置为使用默认方法进行容量估算。 该方法将测量的原始电池电压与“空”和“满”状态电池电压之间的范围进行比较(按电池数量换算)。
由于所测电压在负载下变化时,由于估算电荷的波动,这种方法导致估算不是很准确。
以设置电池1为例:
- 打开 QGroundControl 并连接上飞机。
- 在上面的工具条中选择 齿轮 按钮,然后在左面的工具条中选择 电源 按钮。 3.您将看到表征电池的基本设置。以下各节说明为每个字段设置的值。
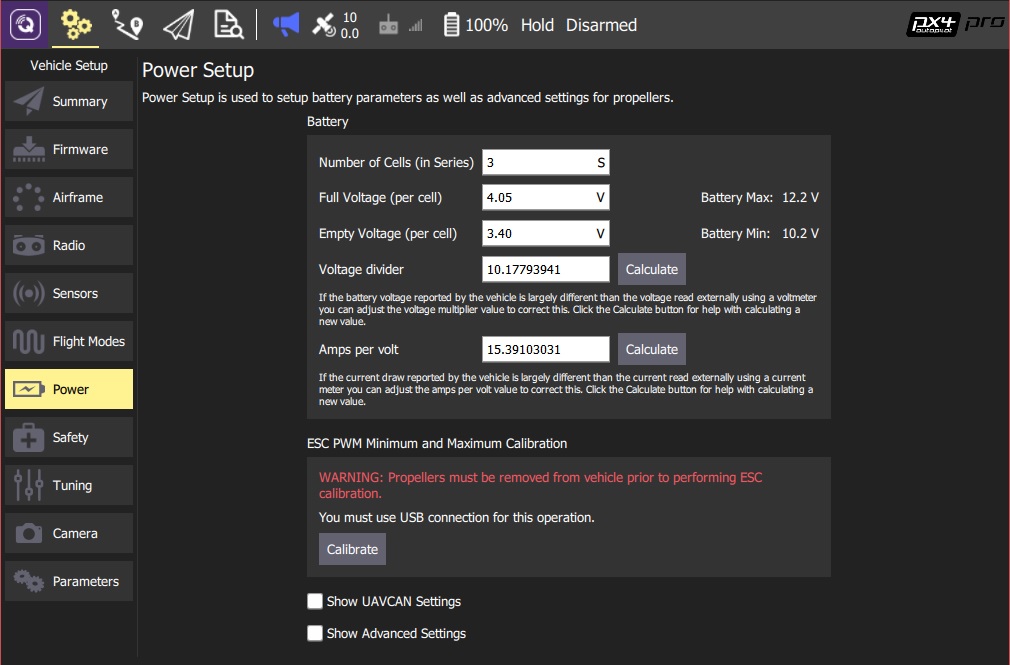
在编写本文时,QGroundControl仅允许您在此视图中设置电池1的值。对于具有多个电池的载具,您需要直接设置电池2(BAT2_*)的参数,如下节所述。
电池数量(串联)
这将设置电池中串联连接的电池数量。通常,这将以数字后跟“ S”(比如3片电池串联为“ 3S”)的形式写在电池上。
单个原电池的电压取决于电池类型的化学性质。最常见的无人机电池类型(锂聚合物-LiPo)的标称电池电压为3.7V。为了实现更高的电压(这将更有效地驱动车辆),多个电芯进行串联;端子处的电池电压则为电池电压的倍数。
如果未提供电池数量,则可以通过将电池电压除以单个电池的标称电压来计算。下表显示了LiPo电池的标称电压与电池的关系:
- 1S-3.7V
- 2S-7.4V
- 3S-11.1V
- 4S-14.8V
- 5S-18.5V
- 6S-22.2V
此设置对应的参数:BAT1_N_CELLS和BAT2_N_CELLS;
满电电压(每节)
这将设置每个电池的标称最大电压(也称为满电电压)。
该值应设置为略低于电池的标称最大电池电压(对于LiPo为4.2V),但又不应设置得太低,以使经过几分钟的飞行后估计容量仍为100%。默认值通常适用于LiPo电池。
充满电后,电池的电压可能会随时间小幅降低。设置为略低于最大值可补偿此下降。
此设置对应于参数:BAT1_V_CHARGED 和BAT2_V_CHARGED。
空电压(每节)
这将设置每个电池的标称最小安全电压(低于此电压使用可能会损坏电池)。
没有单个值可以说电池已耗尽。如果选择的值太低,则电池可能会因深度放电而损坏(和/或车辆可能会坠毁)。如果选择的值太高,则可能会不必要地减少航班。
LiPo电池的经验法则:
- 3.7V空载是保守的最小值。
- 负载下(飞行时)的3.5V电压接近实际最小值。在此电压下,您应该立即降落。
- 负载下的3.2V电压会损坏电池。
当电压低于保守范围,给电池充电越早越好-这样做电池的寿命会更长,容量衰减速度更慢。
NOTE 此设置对应于参数:BAT1_V_EMPTY和BAT2_V_EMPTY。
分压器
如果您的车辆通过电源模块和飞行控制器的ADC测量电压,则应每板一次检查并校准测量值。要校准,您需要一个万用表。
校准分频器的最简单方法是使用QGroundControl,并遵循设置 > 电源设置”(QGroundControl用户指南)上的分步指南。
安培/伏
如果使用的是基本配置(无负载补偿等),则不需要此设置。 如果使用基于电流的负载补偿或电流积分,则必须校准每伏分压器的安培数。
校准分频器的最简单方法是使用QGroundControl,并遵循设置 > 电源设置”(QGroundControl用户指南)上的分步指南。
该设置对应的参数: BAT1_A_PER_V 和 BAT2_A_PER_V.
基于电压的负载估算补偿
借助配置好的负载补偿,测试的电压将更加稳定,上下飞行时变化更小。
负载补偿试图抵消使用基本配置时在负载下测得的电压/估算容量的波动。这可以通过估算空载电池的电压,然后使用该电压(而不是测得的电压)估算剩余电量来实现。
要使用负载补偿,您仍然需要设置基本配置。该空电压(BAT_V_EMPTY)因为已经应用了负载补偿;所以需要被设置为比正常空电压高。
PX4支持两种负载补偿方法,可通过设置以下两个参数之一来启用:
- BAT1_R_INTERNAL - 基于电流的负载补偿(推荐)。
- BAT1_V_LOAD_DROP - 基于推力补偿。
基于电流的负载补偿(推荐)
这种负载补偿方法依靠电流测量来确定负载。它比基于推力的负载补偿要精确得多,但需要您使用电流传感器。
要启用此功能:
- 将参数BAT1_R_INTERNAL设置为电池1的内部电阻(对于其它电池重复此操作)。
LiPo充电器,可以测量电池的内部电阻。典型值为每个电池5mΩ,但这会随放电电流额定值,电池寿命和健康状况而变化。
- 您还应该在基本设置屏幕中校准每伏分压器的安培数。
基于推力的负载补偿
这种负载补偿方法基于电机控制推力输出来估算负载。
该方法不是特别准确,因为推力指令与电流之间存在延迟,并且推力与电流不成线性比例。如果您的载具装有电流传感器,请改用基于电流的负载补偿。
要启用改功能:
- 参数 BAT1_V_LOAD_DROP 设置为在全油门负载下电池显示的电压降.
基于电压的估计与电流积分相融合
这是测量相对电池消耗的最准确方法。如果每次启动时都使用健康,新鲜的充电电池正确设置,则估计质量将与智能电池相当(并且理论上可以进行准确的剩余飞行时间估计)。
该方法通过将可用容量的基于电压的估计值与已消耗电荷的基于电流的估计值相融合,来评估电池的剩余容量。它需要能够准确测量电流的硬件。
要启用此功能:
- 首先使用基于电流的负载补偿建立准确的电压估算。
包括校准安培每伏特分压器设置。
- 将参数BAT1_CAPACITY设置为电池容量的大约90%(通常印在电池标签上)。
请勿将该值设置得太高,否则可能导致估算不佳或估算容量突然下降。
附加信息
通过对测量电流进行数学积分可以得出随时间消耗的电荷的估算值(此方法可提供非常准确的能耗估算值)。
在系统启动时,PX4首先使用基于电压的估计来确定初始电池电量。然后将此估算值与当前积分的值融合在一起,以提供更好的组合估算值。融合结果中每个估计值的相对值取决于电池状态。电池越空,基于电压的估算值就越多。这可以防止深度放电(例如,因为其配置有错误的容量或起始值错误)。
如果您始终以健康的充满电开始,则此方法类似于智能电池使用的方法。
电流积分不能单独使用(没有基于电压的估计),因为它无法确定初始容量。电压估算使您可以估算初始容量并提供有关可能的错误的持续反馈(例如,如果电池有故障,或者使用不同方法计算出的容量之间存在不匹配)。
参数迁移说明
在PX4 v1.10之后增加了对多个电池的支持,从而创建了新的带有前缀BAT1_ 的参数,该参数对应于所有带前缀的旧参数BAT_。对BAT_和的更改BAT1_ 已同步:
如果更改了旧参数或新参数,则将值复制到另一个参数中(它们在两个方向上保持同步)。
如果启动时旧参数/新参数不同,则将旧BAT_参数的值复制到新BAT1_ 参数中。