手持遥控器
如果您想手动控制您的无人机,则需要使用无线电控制(遥控器)系统。本章主要讲解遥控器的工作原理,如何为无人机选择合适的无线电系统以及如何将其连接到飞行控制器。
在自动模式可以不使用遥控器,您可以设置参数: COM_RC_IN_MODE为1;以关闭遥控器检查.
遥控器如何工作?
遥控系统有分为发射机和接收机,发射机可以远程控制接收机进行信号输出,飞手可使用发射机来操控无人机。 发射机(一般称为遥控器)具有物理控件,可用于指定无人机运动(例如速度,方向,油门,偏航,俯仰,侧倾等)和飞行模式(比如自动起飞、降落、返航、自动模式等)
在具有数据回传功能的遥控器系统上,发射端(一般称为遥控器)还可以接收和显示来自无人机的回传信息(例如电池电量,飞行模式);这种遥控系统类似于数传;但遥控系统一般要求延时相当小。 在中国内地使用FUTABA(推荐)、乐迪、天地飞、SIYI等品牌遥控的用户较多。
遥控器系统包含一个接收机模块,这个模块需要连接到飞行控制器;飞行控制器收到控制指令后会根据当前状态和模式确定该如何处理该控制指令(如果不符合安全机制,可能飞行控制器会拒绝执行),并适当地驱动无人机的电机和舵机等执行器。
遥控器系统支持多少个“通道”输出是判断性能的重要标准。 通道数量定义了在遥控器上可以使用多少个不同的物理控件来向无人机发送命令,例如,实际上可以使用多少个开关,转盘,操纵杆) 在无人机上;遥控器至少需要有4个通道(用于横滚,俯仰,方向,油门);无人车至少需要两个通道(转向+油门)。 8通道或16通道遥控器器可以用于控制无人机切换[飞行模式](../ flight_modes / README.md),或者控制其它外部硬件,比如云台、相机、起落架等。
建议选用8通道以上的遥控系统。
遥控器类型
无人机遥控器
下面显示了无人机最常用的遥控器形式。 如图所示,它具有单独的操纵杆,用于控制侧倾/俯仰和油门/偏航(即飞机至少需要4个通道)。
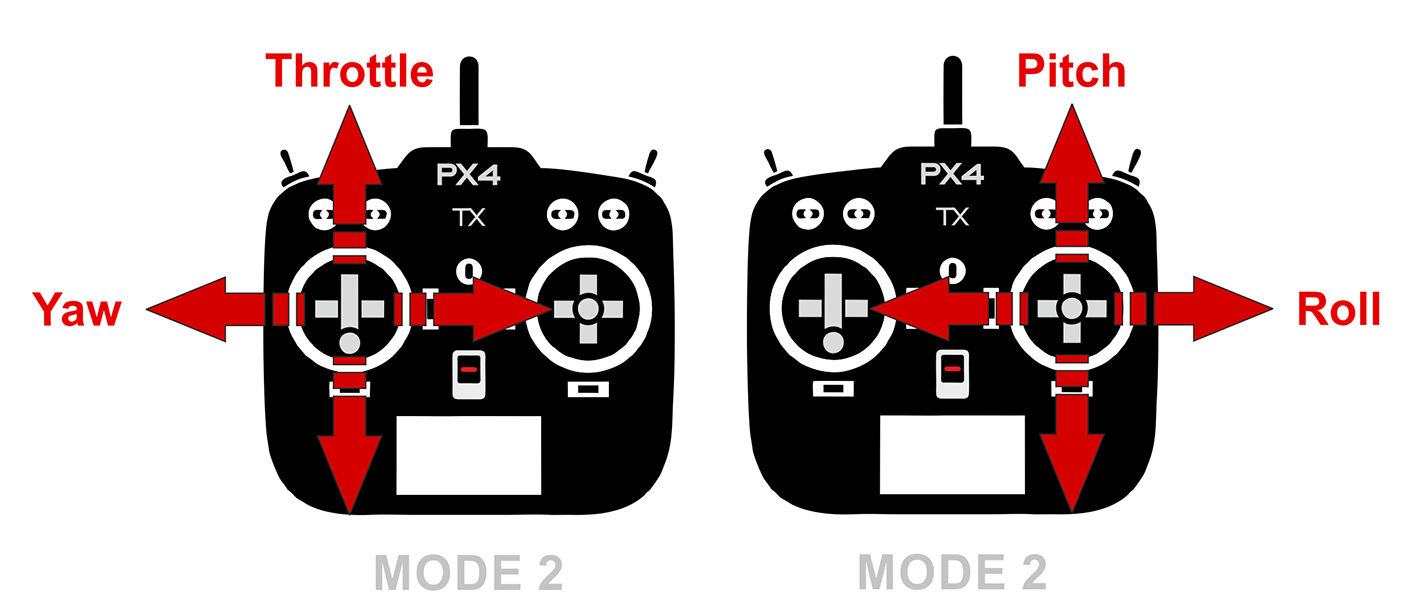
控制杆,开关等的布局可能很多。更常见的布局已指定了特定的“模式”编号。 模式1和模式2 (如下所示)仅是油门杆的位置不同。
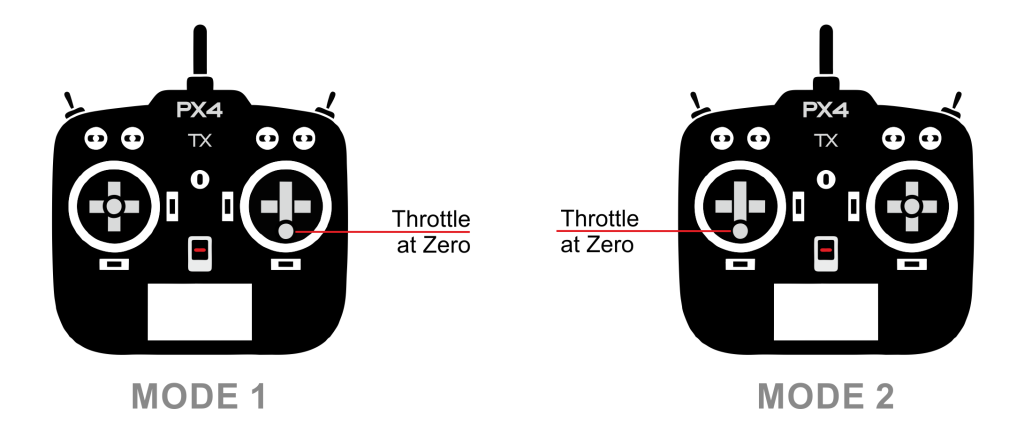
可以根据您的爱好选择一种模式 (模式二比较多人使用);如果您的使用习惯与上述模式不同;您只需要在校准的时候按照文字提示操作对应的操作杆即可.
无人车的遥控装置
无人车(UGV)最少需要2通道发射机才能发送转向和速度值。 通常,变送器使用滚轮和触发器,两个单轴控制杆或单个双轴控制杆设置这些值。 更多的通道或控制机制可以用户模式切换或者控制其它外部硬件。
选择遥控器系统
您需要选择彼此兼容的遥控器发射器和接收机。 此外,接收机必须与PX4和飞行控制器硬件兼容。
遥控器发射机与接收机一般配套销售。
PX4兼容接收机
除了发射器/接收器对兼容之外,接收器还必须与PX4和飞行控制器硬件兼容。
一般情况下只要您的遥控器接收机支持以下协议就可以使用:
- SBUS1总线协议
- DSM协议
- PPM协议 其它协议的接收机可以使用解编码器转成上述协议基本都可实现兼容。
连接遥控接收机
下面是通用性教程,接收器连接到支持其协议的飞行控制器接口:
- Spektrum 和 DSM 接收机连接到 DSM 接口(pixhack接口标识为JR;V5系列标识为DSM/SBUS接口DSM针)。
- PPM协议接收机连接到RC IN/PPM IN 接口。
- SBUS协议接收机连接到Pixhack RCIN接口/V5系列DSM/SBUS接口SBUS针。
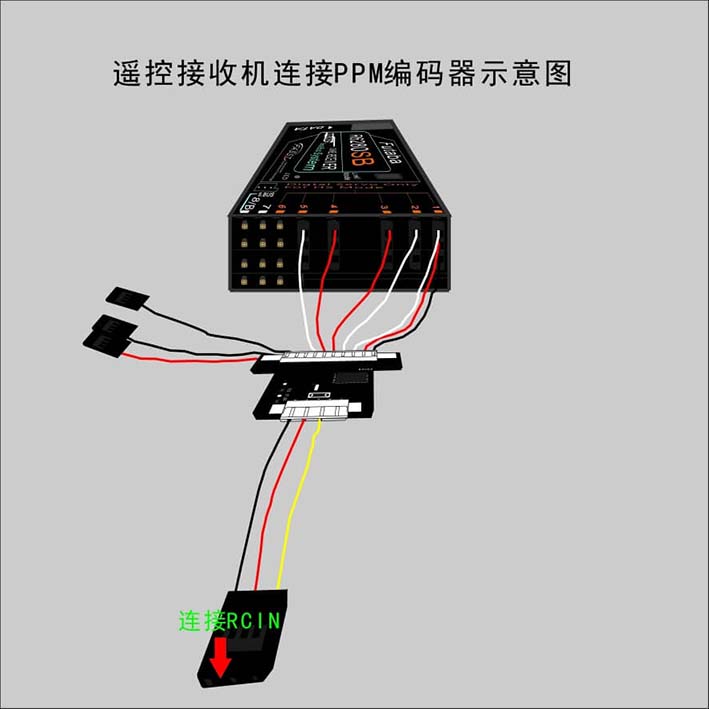
- PWM协议接收机需要连接PWM转PPM编码器;然后连接到RC IN/PPM IN,如下图所示
快速入门提供了连接到特定飞行控制器的说明:
遥控发射机和接收机配对
在校准/使用遥控器前,必须进行接收器和发射器配对,以使它们能相互通信。 发射器和接收器配对的过程不同的硬件有所不同,有关说明请看遥控器说明书。