飞行模式有关配置
飞行模式 提供了不同类型的 辅助飞行 ,以及通过设定执行任务的或者通过相应计算机控制的 全自主飞行 。 不同的飞行模式使得新用户可以使用一个相对于单一的基础遥控器飞行而言更广泛的平台来学习飞行。 不同的飞行模式还提供了一些常见的自动化任务,比如起飞、降落和自动返航功能。
PX4 允许您从地面站(平板电脑或者桌面电脑)或者遥控器来切换飞行模式。 如果遥控器或者平板电脑都连接上 PX4 的话,两者都可以改变当前的飞行模式并且覆盖之前飞行模式的设置。
这个话题说明了如何在你的遥控器开关上映射飞行模式设置。
您必须已经配置好了您的 遥控器 以便设定飞行模式。
我应该设置什么飞行模式呢?
你可以设置任何(或者不设置) 这里 描述的飞行模式。
新手可以考虑设置一个或者多个下面的这些使得飞机更容易控制的飞行模式:
- 自稳模式 - 飞行器很难侧翻,并且如果遥控器摇杆释放的话飞行器会趋于水平(但无法保持位置定点)。
- 位置模式 - 如果遥控器摇杆释放的话飞行器会停下来保持位置定点(并且不会随风飘移)。
- 定高模式 - 飞行器的爬升和降落被限制了一个最大的速率。飞机会保持高度稳定(但仍无法保持位置定点)。
通常也在遥控器上映射这些开关:
- 返航模式 - 这个模式会把飞行器升高到安全的高度并且返回起飞点。
- 任务模式 - 这个模式将会运行地面站发送的预先编写好的任务。
- Kill Switch - 立即停止所有电机的输出(飞行器可能会摔坏,这在某些紧急情况下比允许其继续飞行更为可取)。
多通道飞行模式选择 vs 单通道飞行模式选择
PX4 (QGroundControl) 支持两种方式来映射飞行模式到遥控器开关/表盘:
- 单通道模式选择: 单通道编码模式下最多分配 6 个飞行模式到遥控器的不同开关位置上。
- 多通道模式选择: 把不同飞行模式分配到不同的遥控器开关位置,来使用一个或者多个通道的编码。 一些模式被硬编码以共享通道,或者是根据其他选择的模式被自动指定(多通道模式选择的方式很多时候会导致困惑)。
推荐使用 单通道模式选择 的方式,因为它更容易被理解和配置。
单通道飞行模式选择
单通道选择模式允许您指定一个 "飞行模式" 通道,最多选择 6 种飞行模式,依赖于该通道的 PWM 值来被激活。 您也可以单独的指定特定的通道来映射 Kill Switch,自动返航和机外控制(offboard)模式。
为了使用单通道飞行模式选择的方式,你首先需要配置你的 遥控器 来映射遥控器上开关的物理位置到一个单个通道中去。 这里 我们提供了一个视频演示 Taranis 遥控器通常是如何进行该操作的(如果您使用的是不同品牌的遥控器的话请查阅相应文档)。
配置单通道飞行模式选择:
- 打开 QGroundControl 并连接上飞机。
- 打开您的 RC 遥控器发射机。
点击上方工具栏的 Gear 图标(飞行器设置),然后在左侧边栏选择 Flight Modes 。
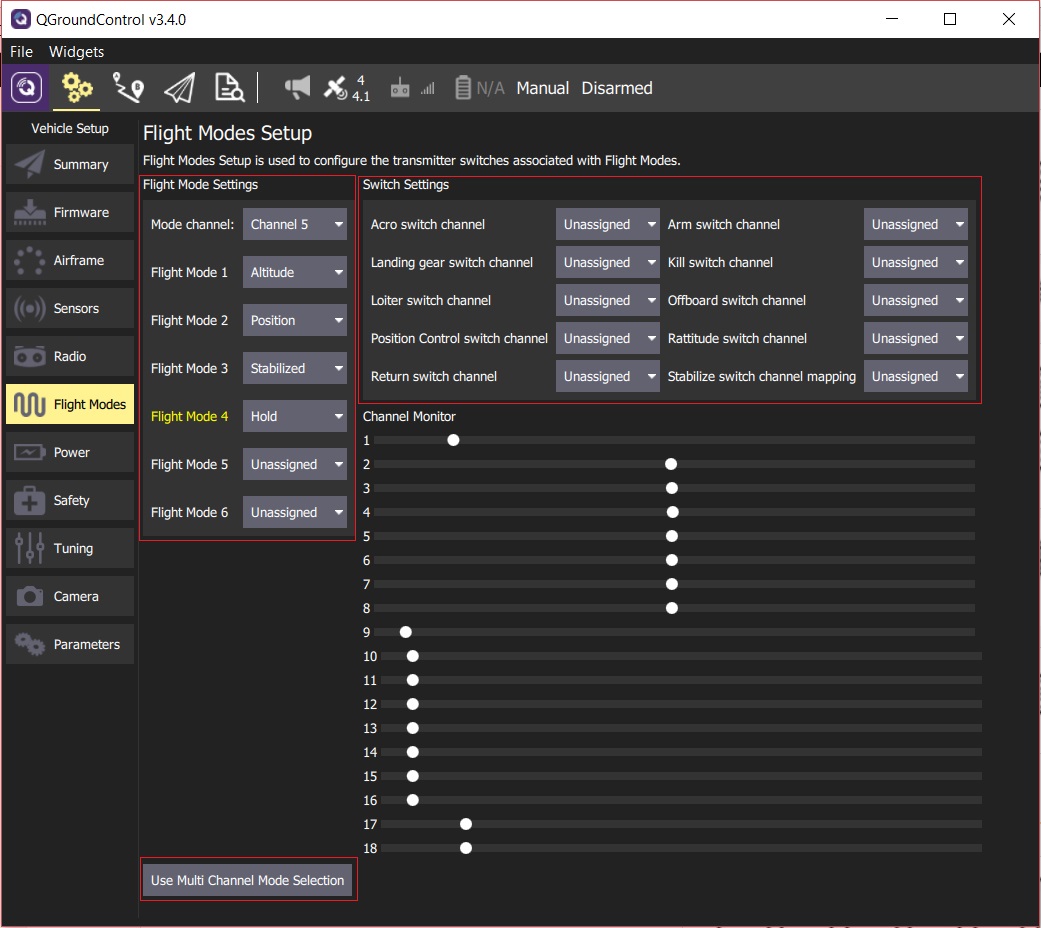
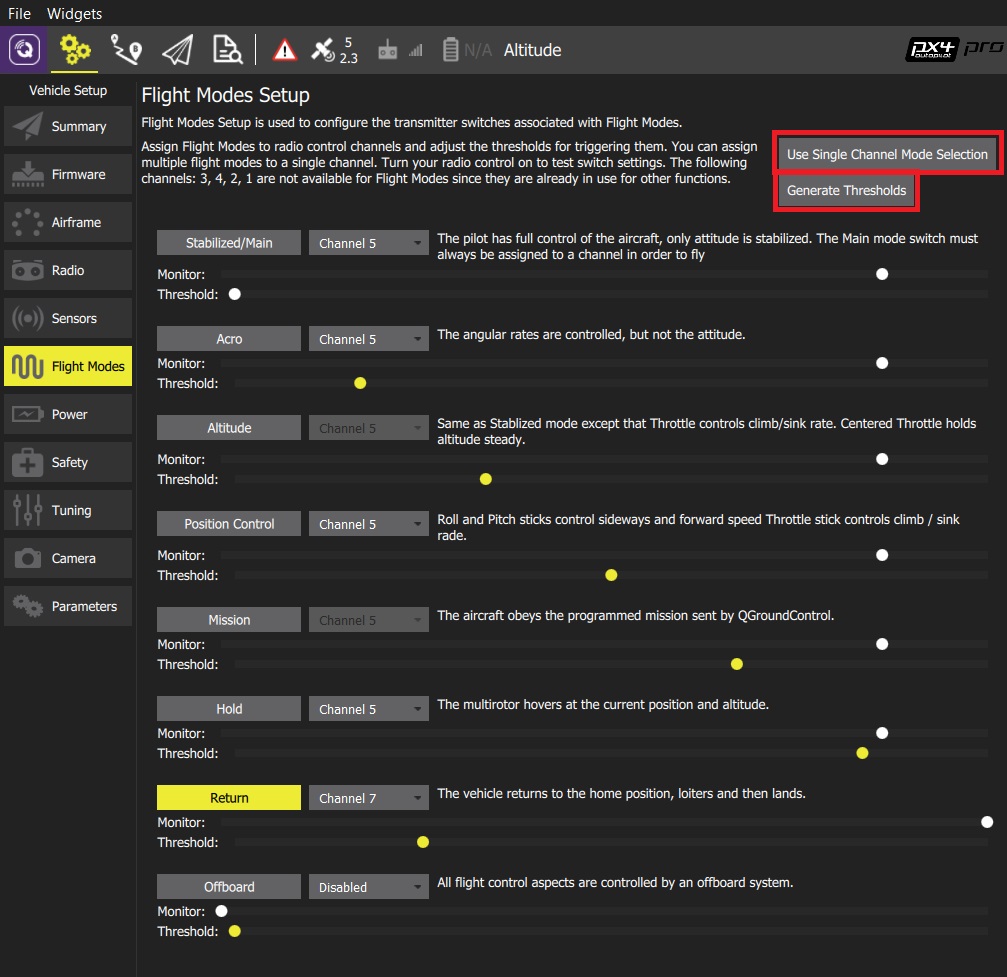
如果界面中显示的是 Multi Channel Mode,点击 Use Single Channel Mode Selection 按钮来切换成单通道模式。
进行 飞行模式设置 :
- 选择 Mode channel (上面显示的是 Channel 5 ,但是这是取决于你遥控器的设置的)。
- 最多可以选择 6 个 飞行模式 。
- 进行 遥控器开关设置 :
- 选择你想要映射的特点飞行模式的通道 - 例如:自动返航,Kill switch,机外控制(offboard) 等模式。 (如果你的遥控器发射机上有空闲的开关或者通道的话)。
- 测试模式是否映射到正确的发射器开关:
- 检查 Channel Monitor 以确认改变每个开关可以改变预期的通道。
- 拨动你遥控器上刚刚映射的飞行模式有关的开关,并检查对应的飞行模式已被激活( QGroundeControl 上对应的通道的字体在被激活的情况下变为黄色 )
所有被更改的值都会自动保存。
单通道模式配置的视频演示(包括遥控器相关设置)
通常使用遥控器上的 2 级和 3 位开关的位置来表示 6 个飞行模式,并将每一个开关组合作为一个特定的 PWM 值,使用单一通道发送。
下面视频演示了如何使用 FrSky Tarais 遥控器(一款非常受欢迎、高推荐度的 RC 发射器)。 这个过程涉及到为两个真正的开关的每个位置组合分配一个 "逻辑开关"。 然后,每个逻辑开关都被分配给同一频道的不同 PWM 值。
然后视频显示如何使用 QGrounderControl 指定模式通道并且映射到 6 个 “信号槽” 中的每一个。
单通道模式设置示例
此示例显示您将如何配置发射器和PX4:
- 使用单通道模式设置方法(手动,高度,Acro)在飞行模式之间进行选择的三向开关。
- 调用某些功能(通过无线电开关参数)(撤防/撤防)的双向开关。
本示例演示如何设置常用的 FrSky taranis 遥控器。 对于其他遥控器,配置可能会稍有不同。
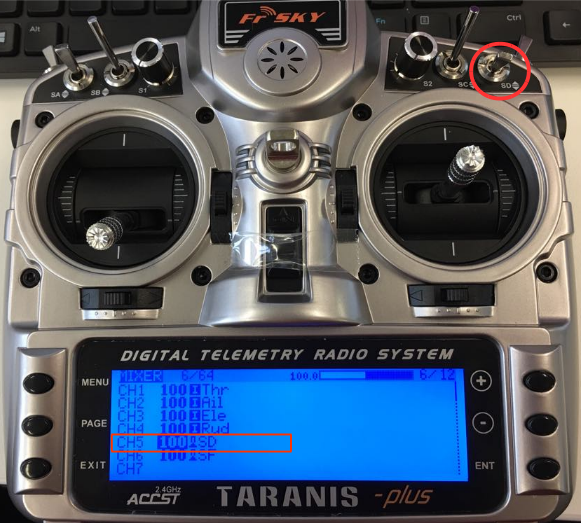
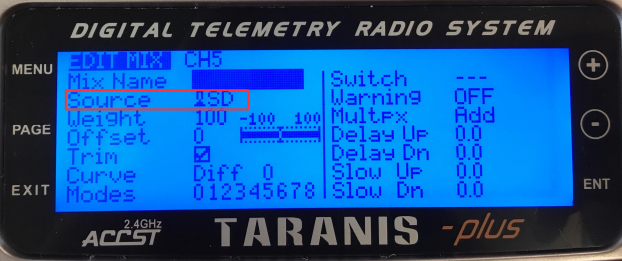
首先设置您的遥控器发射机。 下面我们将演示如何将 Taranis 的 "SD" 开关映射到通道 5 。 这是在 Taranis 的 'mixer' 的界面中,如下所示:
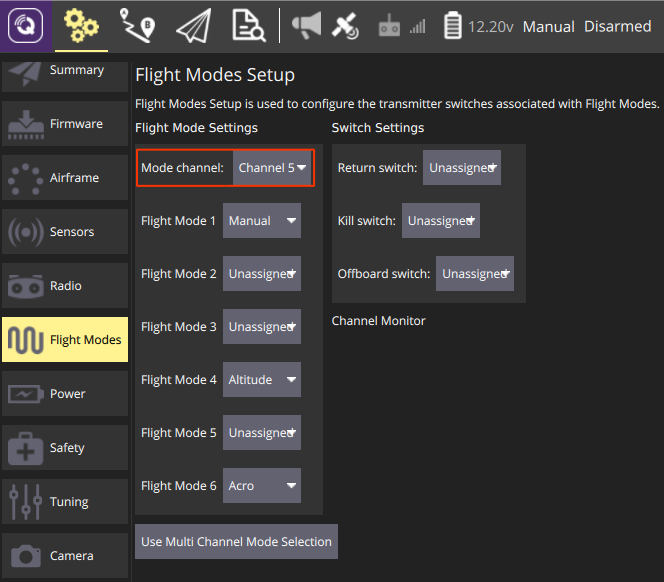
然后, 您可以在 QGroundControl 选择单通道模式选项中选择通道和飞行模式:
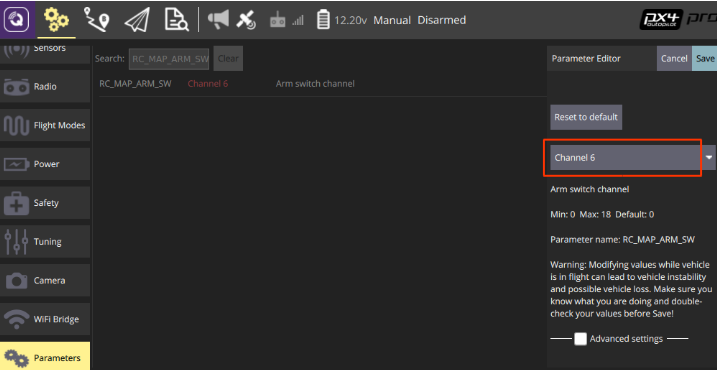
Radio switch参数将特定功能映射到该通道。 假设你已经在您的发射器中映射了一个通道,您可以通过 setting the parameter 来分配通道。
例如,我们在 QGroundControl 中把通道 6 映射到 RC_MAP_ARM_SW 参数上去。
多通道飞行模式设置
我们建议您使用 单通道飞行模式 选择,因为多通道飞行模式选择下很可能会造成用户您比较混乱和疑惑。 如果您选择使用此方法,那么最好的办法是开始分配频道时注意到您选择后显示的 QGroundeControl 报出的信息。
多通道飞行模式选择下,允许用户您将一个或多个飞行模式映射到一个或多个通道。 有一些飞行模式(同对应开关)必须被定义,对应的通道也同样被分配。
使用多通道分配飞行模式界面来配置飞行模式:
- 打开您的 RC 遥控器发射机。
- 打开 QGroundControl 并连接上飞机。
- 在顶部工具栏中选择齿轮图标(载具设置),然后在侧栏中选择飞行模式
如果以单通道模式打开屏幕,请单击“ 使用多通道模式选择”按钮以更改屏幕。
4.选择要分配给交换机的模式,然后选择关联的通道(所选模式将在用户界面中移动,以按通道分组)。
分配频道的模式有很多复杂之处:
某些模式无法手动编辑(变灰),因为它们的通道和阈值级别是根据其他模式设置的值自动定义的。例如:
- 任务模式-自动分配与保留相同的频道号(如果保留频道由用户定义)。如果未定义用于保持的通道,则将为任务模式自动分配与稳定/主模式相同的通道。例如,这防止用户在不同的通道上定义稳定/主要和任务模式,以确保用户不能同时将两种模式都打开。
- 高度模式-自动分配与位置控制(如果已定义)相同的通道号,否则分配与稳定/主要模式相同的通道。
辅助模式- 如果(且仅当)位置控制已启用且在不同于“ 稳定/主”的通道上定义时,此模式与“ 稳定/主”模式添加到同一通道。
5.单击生成阈值按钮。 这将自动为所有模式创建阈值,并在每个通道中为其分配的模式均匀分布。例如,在上面显示的模式分配中,大多数模式都分配给模式5,您可以看到每种模式的通道阈值在通道中平均分布。
在此自动驾驶仪安装视频 (youtube)(youtube)中演示了此模式。
由于PX4确定应该选择哪种模式,这种飞行模式选择机制相对复杂。您可能可以从此流程图中获得一些见识(PX4开发人员指南)。
更多信息
- 飞行模式概述
- QGroundControl > 飞行模式
- PX4设置视频 - @6m53s (Youtube)