PX4飞行模式概述
飞行模式定义自动驾驶仪如何响应远程控制输入,以及如何在全自动飞行期间管理无人机的运动。 这些模式向用户(飞行员)提供不同类型/级别的自动驾驶辅助,从自动化诸如起飞和降落的常见任务,到使重新获得水平飞行,将无人机保持在固定路径或位置的机制变得更加容易, 等等
本主题概述了可用的飞行模式,以及在多旋翼(MC),固定翼(FW)和VTOL框架中默认行为的(主要是次要的)差异。
有关特定飞行模式的更多详细信息,请参见 飞行模式.
切换模式
飞行员可以使用遥控器上的开关或地面控制站进行模式切换(飞行模式配置)。
并不是所有的飞机模式都适用于所有类型的飞行器,并且有些模式在不同的飞行器类型上表现有所不同。
某些飞行模式仅在满足特定的飞行前和飞行中条件下才有意义(例如GPS锁定,空速传感器)。 在未满足特定条件前,PX4将不允许过渡到这些模式。
最后,在自动模式下,遥控器摇杆运动在多旋翼飞行时会默认切换到“定点模式”(除非触发了电池低压保护);对于固定翼飞机,操纵杆运动将被忽略。
自动和手动模式
一般而言,飞行模式为手动或自动两种。 手动模式是用户可以通过RC控制杆(或操纵杆)控制无人机运动的模式,而自动模式则由自动驾驶仪完全控制,并且不需要飞行员/远程控制输入。
某些手动模式可能具有自动驾驶辅助机制,以使其更容易获得或恢复受控飞行。 例如,当遥控器操纵杆居中时,大多数模式会使无人机保持水平平衡(自稳)。
手动模式可以进一步分为“简单”和“特技”模式。 在简易模式下,方向杆和俯仰杆可设定无人机倾斜角度,从而可以实现无人机前后左右移动。 这不仅使运动可预测,而且由于控制了角度,因此无人机不可能翻转。 在特技模式下,RC摇杆控制角速度(围绕相应的轴)。 无人机可以翻转,并且虽然更具机动性,但很难飞行。
固定翼:
- 简易手动相关模式: Position(定点), Altitude(定高), Stabilized(自稳), Manual(手动)
- 手动-特技相关模式: Acro(特技)
- 自动相关模式: Hold(保持), Return(返航), Mission(任务), Takeoff(起飞), Land(降落), Offboard
多旋翼:
- 简易手动相关模式: Position(定点),Altitude(定高), Stabilized(自稳), Orbit(轨迹)
- 手动-特技相关模式: Rattitude ,Acro(特技模式)
- 自动相关: Hold(保持), Return(返航), Mission(任务), Takeoff(起飞), Land(降落)(#land), Follow Me(跟随我), Offboard
关键
文档中使用了以下图标:
| 图标 | 描述 |
|---|---|
 |
手动模式。 需要遥控器. |
 |
自动模式,默认情况下,RC控制是禁用的,但更改模式除外。 |
") |
需要定位(例如GPS,VIO或其他定位系统. |
| 所需的高度(例如来自气压计,测距仪的高度)。 | |
   |
飞行模式难度(从易到难) |
多旋翼
Position(定点/位置)模式
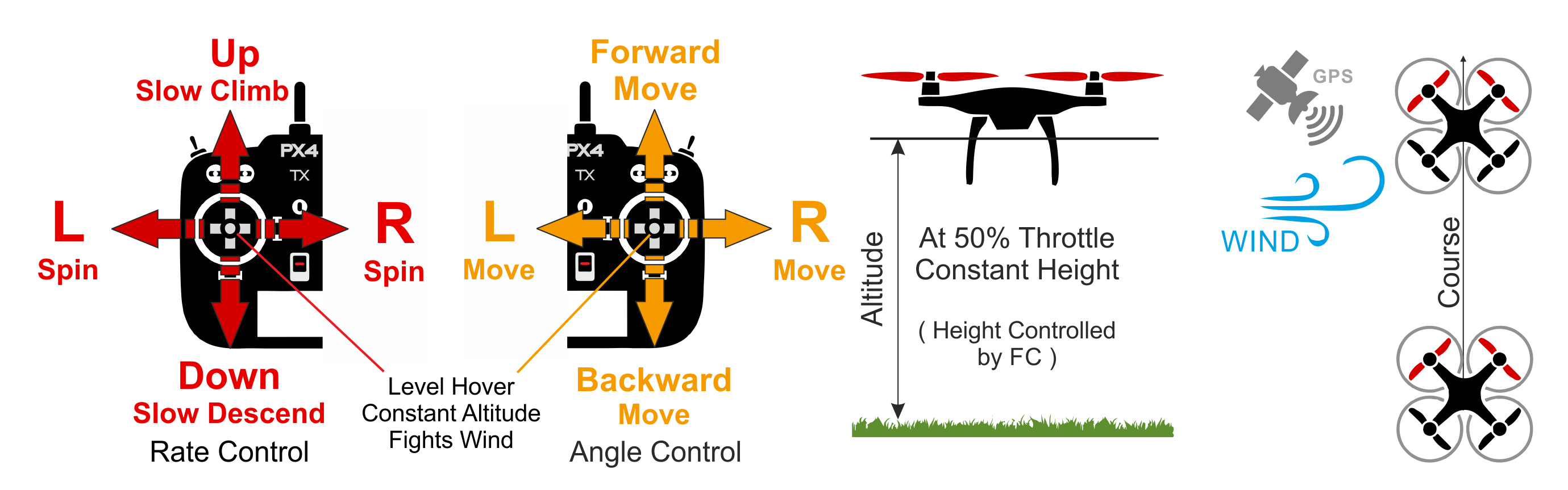
位置模式是一种易于飞行的RC模式,其中,横滚和俯仰摇杆控制着左右、前后和方向(相对于无人机的“机头”)在地面上的速度,油门控制着上升和下降速度。 松开操纵杆使其居中时,无人机主动刹车,调平飞行姿态并锁定在3D空间中的某个位置,自动补偿风和其它作用力。
位置模式是新手上手最安全的模式。 与“定高”和“自稳”模式不同,当操纵杆居中时,无人机将停止行驶,而不是继续行驶直到由于风阻而减速。
Altitude(定高)模式
![]()
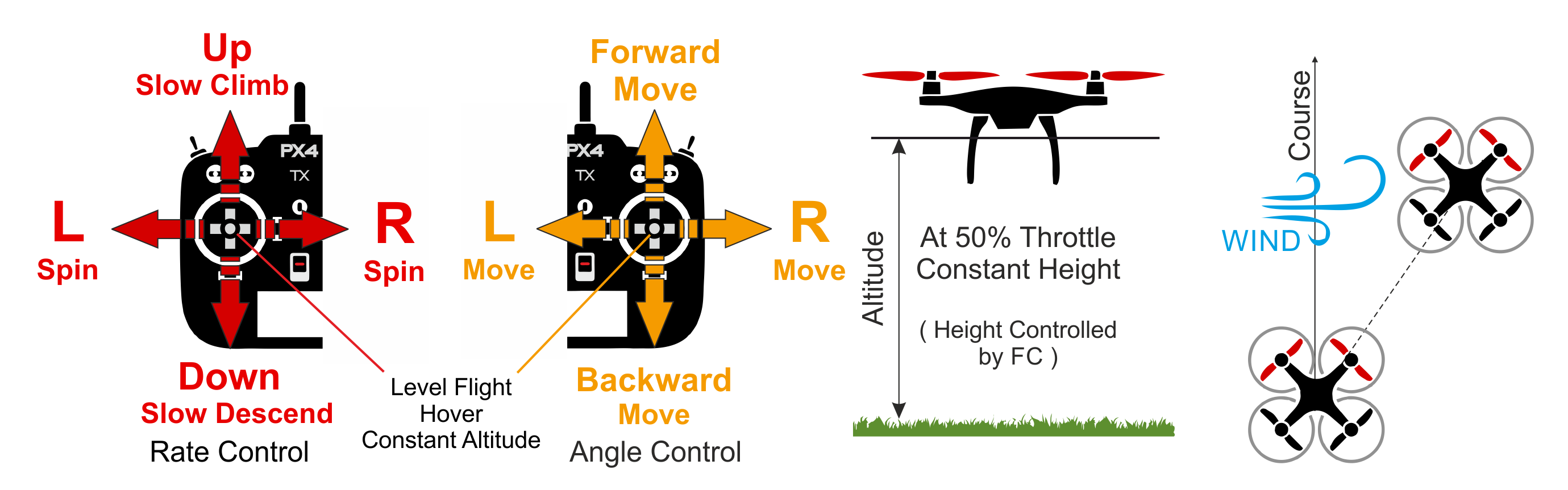
定高模式是一种相对容易驾驶的RC模式,其中横滚和俯仰杆控制无人机在左右和前后(相对于无人机的“机头”)移动,方向杆控制无人机航向旋转速度,油门控制上升/降落速度(油门杆低于中位降落,中位保持高度,高于中位上升)。 当松开操纵杆/使其居中时,无人机将保持水平并保持当前高度。 如果在水平面内移动,无人机将继续行驶直到风阻消散了任何动能;如果有风吹,飞机将沿风向漂移(跟定点或悬停模式的区别在于不保持水平位置)
高度模式是新手最安全的非GPS手动模式。 就像姿态模式一样,但它能在松开操纵杆时还可以维持无人机的高度(油门杆需在中位)。
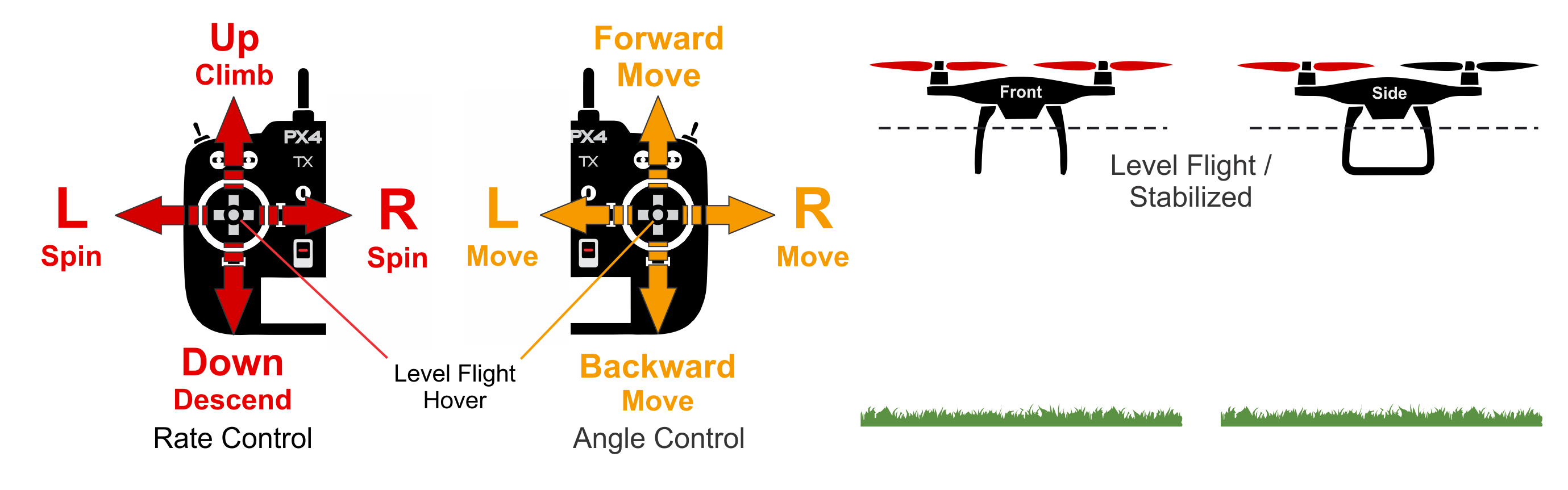
Stabilized(自稳)模式
当RC控制杆居中时,自稳模式下,无人机自动调整至水平平衡“, 要手动控制无人机移动,您需要将操作杆移到中心以外;区别定点模式,其不保持水平位置也不保持垂直高度,只保持无人机的姿态处于水平(极接近水平)。
在手动控制下,俯仰和横滚杆控制无人机的角度(高度),方向杆控制水平面上方的旋转速率,油门控制高度/速度;该模式下您需要时刻操作操纵杆控制无人机水平和高度(非常您的飞机调试的非常理想并且没有任何风或外力否则无法保持位置和高度)
Rattitude
Rattitude模式允许飞行员在大多数时间使用[自稳](#manual_stabilized_mc)飞行,但在需要时仍可以执行[Acro模式](#acro-mc)风格的翻转和技巧。
当横滚/俯仰摇杆在中心区域内移动时,无人机的行为与自稳模式相似,而当摇杆/俯仰杆在外圆周中移动时,无人机的表现类似于Acro模式(默认情况下,手动/稳定模式占80% 范围)。 当操纵杆居中时,无人机姿态将自动恢复平衡(但仍会沿任何风向或以任何预先存在的动量漂移)。
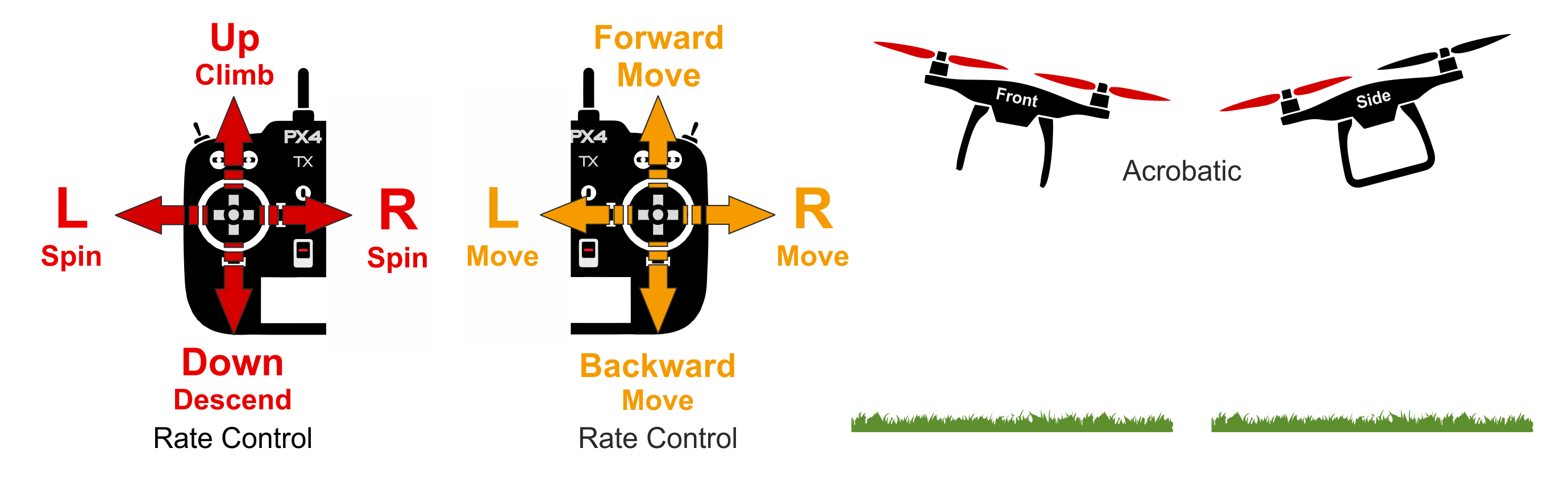
Acro(特技)模式
Acro模式是RC遥控模式,用于执行特技操作,例如3D翻转飞行。 横滚、俯仰和方向杆控制围绕相应轴的角旋转速率,并且油门门直接传递到输出混合器。 当操纵杆居中时,无人机将停止旋转,但保持其当前方向(在其侧面,倒转等)并根据其当前动量移动。
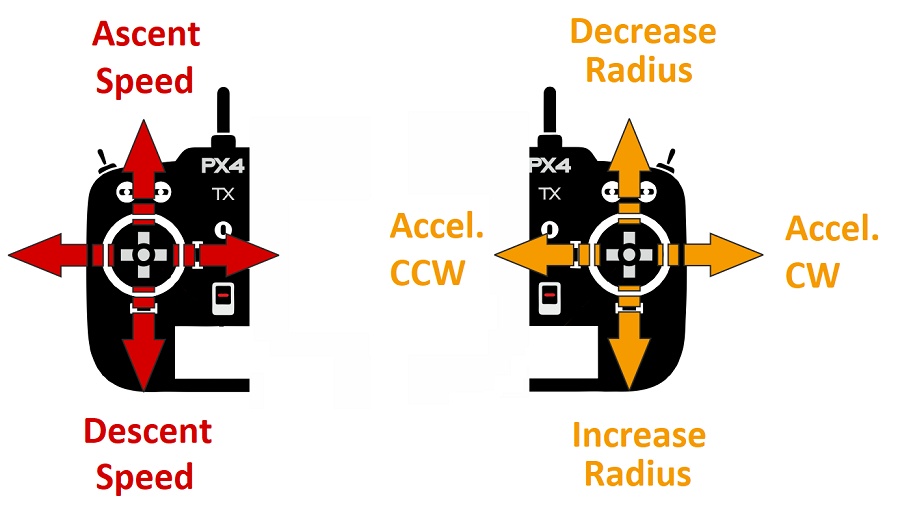
Orbit(轨道)模式
轨道模式允许您命令多轴飞行器(或垂直起降机以多旋翼状态飞行时)绕圈飞行,偏航使其始终面向中心。
需要通过GCS启用该模式,并设置轨道的中心位置和初始半径。
然后,默认情况下,无人机将沿顺时针方向绕中心位置(1m/s)缓慢执行正在进行的轨道。 RC控制是可选的,可用于更改轨道的高度,半径,速度和方向。
Hold(保持)Mode
Hold(保持) mode使多轴直升机停止并悬停在其当前位置和高度(保持位置抵抗风和其他力)。 该模式可用于暂停任务或在紧急情况下帮助您重新获得对无人机的控制。 您可以使用预编程的RC模式开关或 QGroundControl (Pause)暂停按钮激活它。
Return(返航)模式
[Return(返航)模式](../ flight_modes / return.md)会使无人机返回到安全的地方 该模式可以手动(通过预编程的RC开关)激活,也可以自动(即在触发failsafe(故障保护)的情况下激活)。 返回行为取决于参数设置,并且可能遵循任务路径和/或任务着陆模式(如果已定义)。 默认情况下,无人机上升到安全高度,飞到其原始位置(home点),然后降落。
Mission(任务)模式
任务模式下,无人机会执行已上传到飞行控制器的预定义的自主任务(飞行计划)。 该任务通常是通过地面控制站(GCS)应用程序创建和上传的。
PX4 GCS称为QGroundControl。 QGroundControl 与我们用于配置PX4的应用程序相同。
Takeoff(自动起飞)模式
[Takeoff](../ flight_modes / takeoff.md)模式使多旋翼无人机垂直爬升至起飞高度并悬停在适当位置。
Land(降落)模式
Follow Me(跟随)模式
Follow Me模式使多轴直升机自动跟踪用户(基于用户提供其所在的位置)。 位置设定点来自运行 QGroundControl 的Android手机/平板电脑或来自MAVSDK应用程序。
Offboard Mode
Offboard模式使多轴直升机服从MAVLink上提供的位置,速度或姿态设定值。
此模式适用于配套计算机和地面站!
固定翼模式
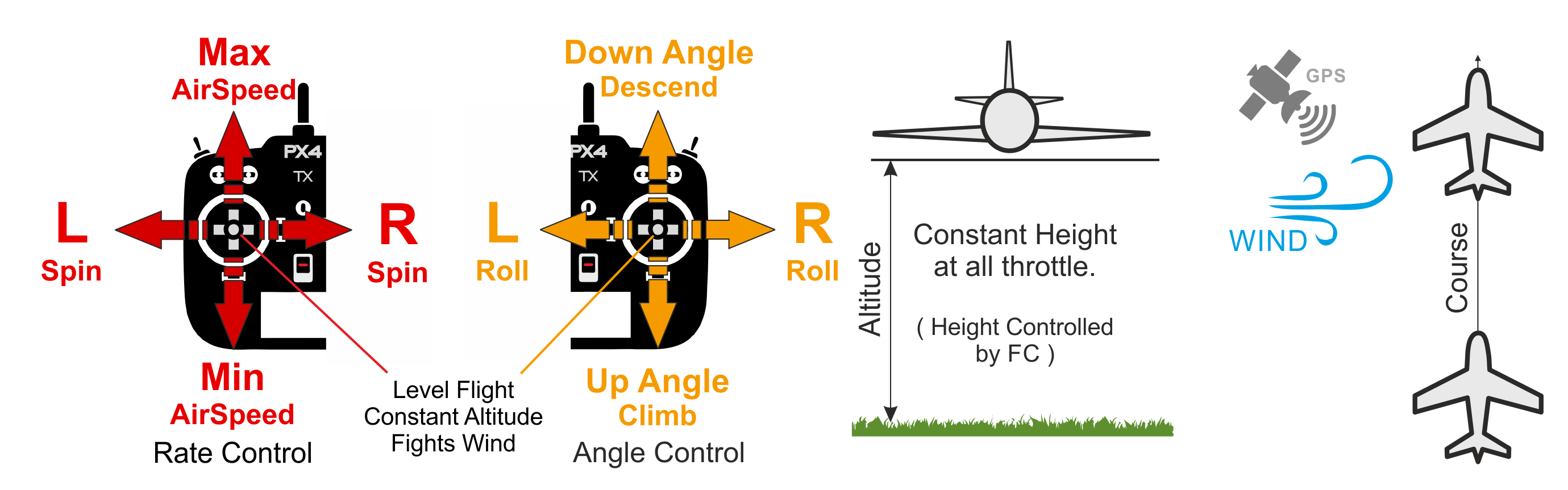
Position(定点)模式
位置模式是一种易于飞行的RC模式,,在该模式下,当松开操纵杆/将操纵杆居中时,无人机将在当前方向上平移并飞行一条直线地面轨迹- 补偿风和其他力量
油门决定空速(油门为50%时,飞机将以预设的巡航速度保持其当前高度)。
俯仰杆用于控制飞机上升/下降。 横滚,俯仰和方向均受角度控制(因此不可能使无人机侧翻或翻跟斗)。
位置模式是新飞行员使用的最安全的固定翼手动模式。
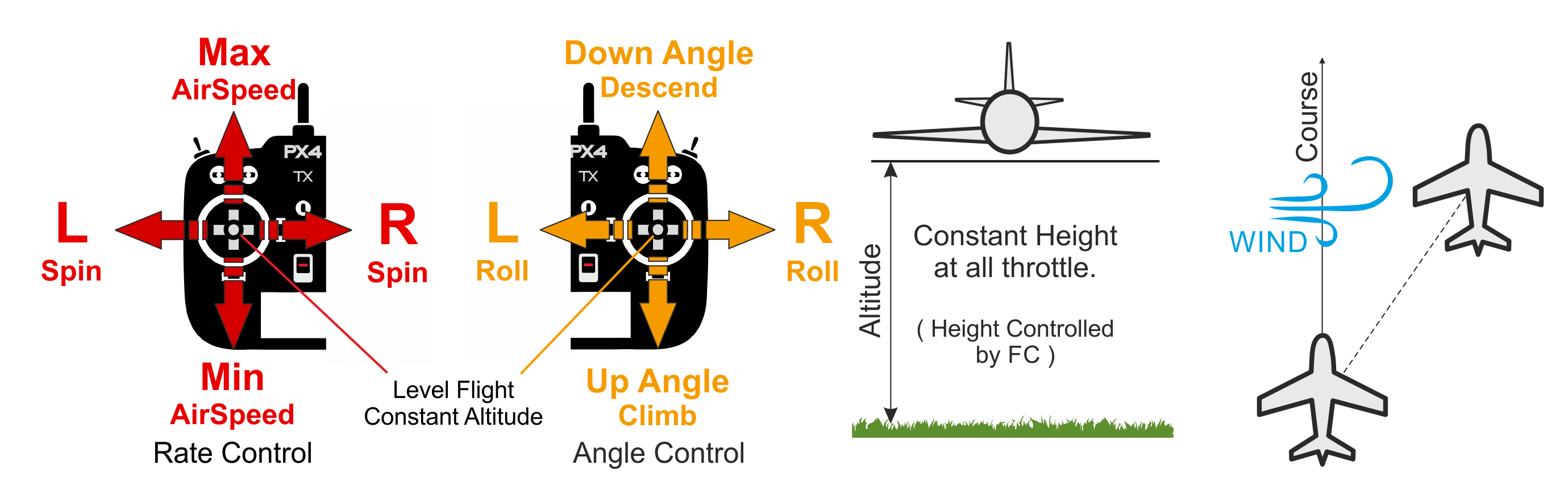
Altitude(定高)模式
![]()
高度模式使用户更容易控制无人机高度,尤其是达到并保持固定高度。该模式将不会尝试使无人机驶向风。
爬升/下降速率通过俯仰/升降杆控制。 居中后,自动驾驶仪会锁定在当前高度上,并在横滚(副翼)/方向以及任何空速时都将其保持在当前高度。 油门输入控制空速。 俯仰和俯仰是受角度控制的(因此不可能侧翻或翻跟斗)。 当所有遥控输入都居中(无侧倾,俯仰,偏航和约50%的油门)时,飞机将返回到平直的水平飞行(受风影响)并保持其当前高度。
高度模式是最安全的非GPS引导模式,适合初学者学习如何飞行。
就像Manual模式一样,但是在松开俯仰杆时还可以保持飞行高度。
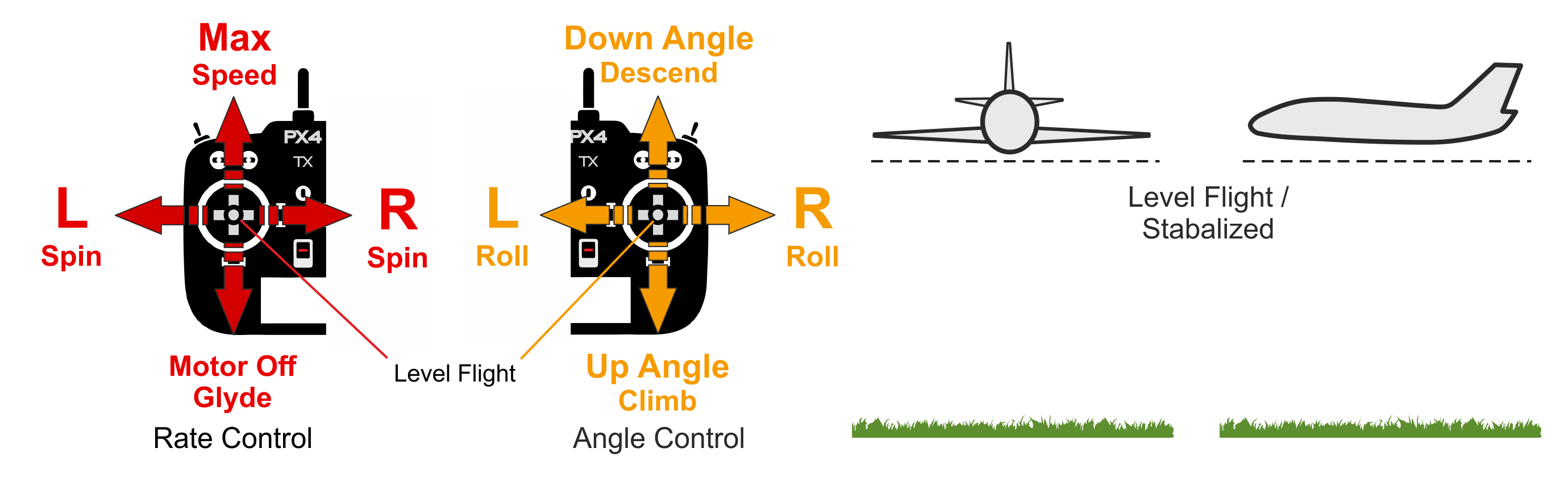
Stabilized(自稳) 模式
自稳模式模式可在RC操纵杆居中时使飞机进入平直飞行状态,并保持水平姿态抵抗风(但不影响飞机前进方向和高度)。
如果副翼杆/俯仰杆不为零(不处于正中位),则飞机基于俯仰输入进行爬升/下降并执行协调的转弯。 副翼和俯仰是受角度控制的。
稳定模式手动模式更容易上手,因为您让它发生翻转,并且控制杆居中后飞机会自动保持水平。
如果将油门降低至0%(电动机停止),飞机将滑翔。 为了执行转弯,必须在整个操纵过程中保持命令,因为如果释放副翼杆,飞机将停止转弯并自行调平(俯仰和偏航命令也是如此)。
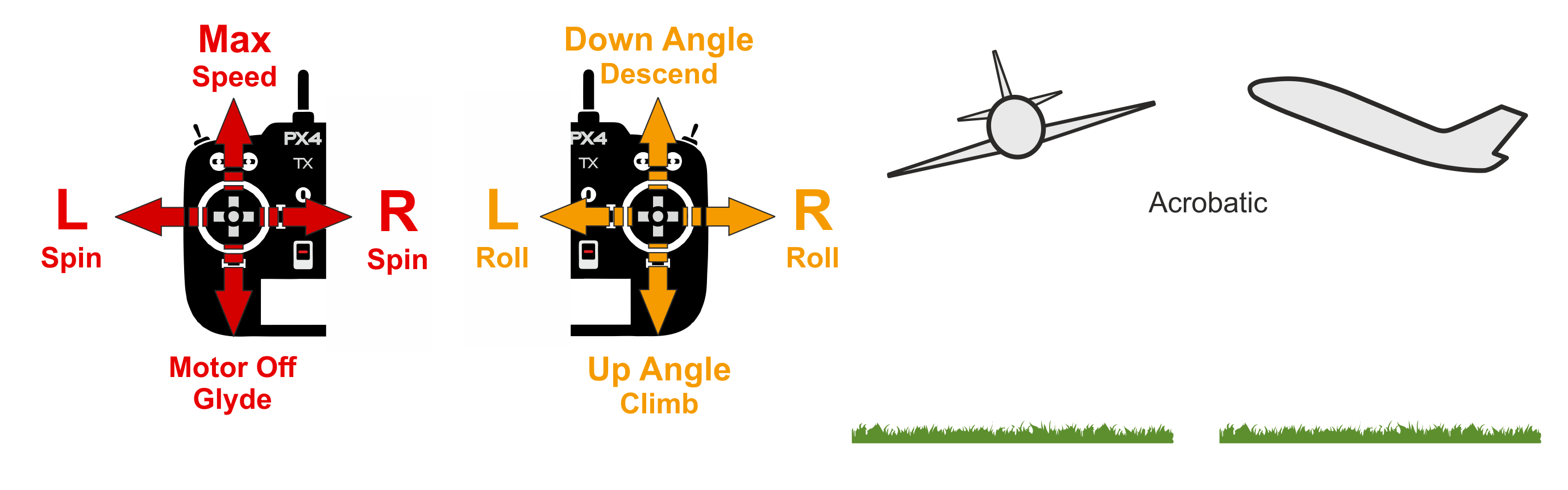
Acro(特技) 模式
Acro(特技)模式 是执行杂技动作的RC模式,例如 横滚,翻转等。
横滚杆,俯仰杆和偏航杆控制围绕相应轴的角旋转速率,并且油门直接传递到输出混合器。
当操纵杆居中时,车辆将停止旋转,但保持其当前方向(在其侧面,倒转等)并根据其当前动量移动。
Manual(手动)模式
手动模式 将RC摇杆输入直接发送到输出混合器,以“完全”手动控制。
这是纯手动模式,没有任何自动机制参与飞机控制,是最难飞行的模式(新手勿用)。 与Acro模式不同,如果摇杆居中,飞机也不会自动停止绕轴旋转-飞行员实际上必须向另外一个方向打杆。
Note 这是唯一的覆盖FMU{FMU(飞控处理控制单元)失效不参与飞行控制}的模式(通过协处理器向FMU发送失效命令).
它提供了一种在FMU或IMU发生故障的情况下,可以通过手持遥控器全面接管油门,升降,副翼和方向舵的安全机制。
Hold(保持)模式
[保持模式](../flight-modes/hold.md)使固定翼飞开始在当前位置以其当前高度盘旋。 该模式可用于暂停任务或在紧急情况下帮助重新获得飞机的控制。 可以使用预编程的遥控器模式开关或 QGroundControl Pause(暂停)按钮激活它。
Return(返航)模式
[Return(返航)模式](../ flight_modes / return.md)会使无人机返回到安全的地方 该模式可以手动(通过预编程的RC开关)激活,也可以自动(即在触发failsafe(故障保护)的情况下激活)。 返回行为取决于参数设置,并且可能遵循任务路径和/或任务着陆模式(如果已定义)。 默认情况下,固定翼飞行器将升至安全高度并使用任务降落模式(如果存在),否则它将飞行到原始位置并转圈。
Mission(任务)模式
任务模式下,无人机会执行已上传到飞行控制器的预定义的自主任务(飞行计划)。 该任务通常是通过地面控制站(GCS)应用程序创建和上传的。
PX4 GCS称为QGroundControl。 QGroundControl 与我们用于配置PX4的应用程序相同。
Takeoff(自动起飞)模式
 
自动起飞模式启动飞机的起飞序列。 具体的发射行为取决于配置的起飞模式(弹射器/手动发射模式或跑道起飞模式)。
Land(降落)模式
着陆模式使飞机在结合该模式的位置转弯并着陆。 固定机翼着陆逻辑和参数在以下主题中进行了说明:降落(固定翼)。
Offboard Mode
Offboard模式使多轴直升机服从MAVLink上提供的位置,速度或姿态设定值。
此模式适用于配套计算机和地面站!
垂直起降机
AVTOL飞机可以作为多直升机或固定翼飞行器飞行。 多直升机模式主要用于起飞和降落,而固定翼模式则用于平飞或执行任务。
通常,VTOL飞机的飞行模式与以MC模式飞行时的[multicopter](#mc_flight_modes)和以FW模式飞行时的[fixed-wing](#fw_flight_modes)相同。
模式之间的切换由飞行员使用RC开关启动,或者在自动模式下需要时由PX4自动启动。
一些注意事项: -默认情况下,VTOL [返回模式](../ flight_modes / return.md)使用任务着陆(如果已定义)。