基本概念
本节主要是无人系统和使用PX4的基本介绍(这主要面向有新手,但对与有经验的飞手来说或许也可以提供帮助)。 如果您已经无人系统的基本概念;您可以转到基础配置界面了解如何连接自动驾驶仪 如果您需要加载固件并使用 QGroundControl 设置无人系统,请查看基本配置。
无人系统是什么?
无人系统是无人驾驶的 ”机器人“ 设备,可以在无人参与的情况下;可以进行自主控制。 无人系统设备可应用在消费、工业、军事等领域的诸多应用场景。 这包括(非详尽):航拍、物流、竞速、搜索和测绘、救援等。
无人系统包含:无人机(UAV);无人船(UGV),无人船(USV),无人潜水器(UUV)等。 无人系统的的 ”大脑“ 被称为自动驾驶仪。 它由在设备控制器(“飞行控制器”)硬件和在硬件上运行的飞行控制器软件组成。
PX4 自动驾驶仪
PX4是功能非常强大的开源自动驾驶仪;也是全世界最出色的飞行控制器。 PX4同时是更广泛的无人机核心平台,其中包括QGroundControl地面站,PX4硬件和MAVSDK,可以使用MAVLink协议与陪伴计算机,照相机和其他硬件等进行集成。 PX4的一些主要功能包括:
- 可控制许多不同的设备机架/类型,包括:飞机(多旋翼,固定翼和垂直起降),地面车辆和水下潜航器。
- 适用于设备控制器,传感器和其他外围设备的硬件选择。
- 灵活而强大的飞行模式和安全功能。
QGroundControl地面站
Dronecode地面控制站称为QGroundControl。 您可以使用QGroundControl将PX4加载(刷新)到自动驾驶仪上,可以设置无人系统,更改不同的参数,获取实时运行信息以及创建和执行完全自主的任务。
QGroundControl可在Windows,Android,MacOS或Linux上运行。可以从这里下载并安装。
自动驾驶仪
PX4最初设计为在 Pixhawk Series 控制器上运行,但现在可以在 Linux 计算机和其他硬件上运行。 选择飞行控制板时,您应当考虑飞行器的物理尺寸限制,想要执行的活动,还有必不可少的成本。
传感器
PX4使用传感器来确定飞行器状态(稳定和启用自动控制所需)。系统最低要求具有陀螺仪、加速度计、磁力计(罗盘)和气压计。需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。固定翼和垂直起降机还应包括空速传感器(强烈推荐)。 有关详细信息,请参阅︰ 传感器 外设
电调与电机
PX4无人机普遍使用无刷电机,其由自动驾驶仪控制电调(ESC)进行驱动(电调将来自自动驾驶仪的信号转换为合适的功率水平,传递给电机)。 有关PX4支持的ESC/Motors的信息,请参阅: 电调 & 电机 电调校准 ESC固件和协议概述(oscarliang.com)
电源模块和电池
PX4无人机通常由锂聚合物(LiPo)电池供电。电池通常使用电源模块连接到系统,它为飞行控制器和电调(用于电动机)提供单独的动力。 HV_PM电源模块设置
手持遥控器
无线电手持遥控器(RC )用于手动控制飞行器。它由一个遥控装置组成,使用发射机来与飞行器上的接收机通信。一些遥控器还可以接自动驾驶仪和相机传回的数据/图传信息。
如果您是新手,在自动任务中请勿操作手持遥控器。
更多信息: 遥控器设置 - QGroundControl 中的遥控配置。 飞行练习 - 学习如何使用遥控器飞行。
安全开关
无人机通常需要配备安全开关,然后才能进行电机解锁和锁定(解锁后,自动驾驶仪才输出控制信号控制电机转动)。通常,安全开关集成在GPS单元中,但也可以是单独的物理组件。
螺旋桨转动存在较大杀伤力。安全开关是一个附加的安全装置,可防止意外发生的遥控器解锁。
数传
数据/遥测无线电可以在地面控制站(如QGroundControl)与运行PX4的无人机之间提供无线MAVLink数据双向通信。 这样就可以在飞行中调整参数,实时监测无人机状态,更改飞行任务等。
伴随电脑
可以通过串行接口或wifi在单独的车载伴随计算机上控制PX4, 伴侣计算机通常使用MAVLink API(例如MAVSDK或MAVROS)进行通信。
使用Robotics API需要具备软件开发技能,并且本书不提供教程。
- Off-board模式 - 用于从 GCS 或机载计算机对PX4进行板外控制的飞行模式。
- Robotics APIs (PX4开发人员指南)
闪存日志
PX4使用SD存储卡来存储飞行日志。
通常使用16G/8G SD卡;建议使用class10以上的卡。
锁定/预解锁/解锁
无人机可能具有螺旋桨等运动部件,其中螺旋桨转动会存在危险! 为了减少发生事故的可能性,PX4具有为无人机提供锁定状态显示:
- Disarmed(锁定): 自动驾驶仪不输出信号控制电机、舵机等。
- Pre-armed(预解锁): 自动驾驶仪为舵机和其他非危险电子设备提供控制信号;电机等危险电子设备不提供控制信号。
- Armed(解锁): 无人机已输出所有控制信号,包括电动机/螺旋桨。
- 默认情况下,使用安全开关解锁进入预解锁状态。然后使用遥控器或地面站MAVlink命令启动解锁。
- 无人机最初是锁定的,必须在飞行前进行解锁; 如果解锁后油门处于低位无人机起飞速度太慢,它将会自动锁定(将无人机恢复为安全状态)。 同样,检测到降落完成后,无人机会自动上锁,以保证安全。
可以配置锁定机制(例如,无人机降落后的上锁(延时)时间)。
飞行模式
飞行模式向用户(飞行员)提供不同类型/级别的无人机自动化和自动驾驶协助。
- 自动模式由自动驾驶仪完全控制,不需要人工参与。例如,这些用于自动化常见任务、例如起飞、返航和降落、其他自主模式执行预编程的任务、跟随GPS信标或接受来自伴随计算机或地面站的命令。
- 手动模式由用户(通过手持遥控器控制杆/操纵杆)在自动驾驶仪的帮助下进行控制。不同的手动模式可实现不同的飞行特性-例如,某些模式可启用杂技技巧,而其它模式则无法翻转,并且可以保持位置/航向逆风。
并非所有飞行模式都适用于所有飞行器类型,并且某些模式仅在满足特定条件时才能使用(例如,许多模式需要全局位置估计)。
可以在此处找到可用的飞行模式的概述。
飞行模式配置中提供了有关如何设置远程控制开关以打开不同飞行模式的说明。
故障保护(Failsafe)
PX4具有可配置的故障保护系统,可以在出现故障时保护或使您的无人机返航! 这些允许您指定安全飞行的区域和条件,以及触发故障保护时将执行的操作(例如,降落,保持位置或返回指定点)。
您只能为第一个故障安全事件指定操作。 一旦发生故障保护,系统将输入特殊的处理代码,以使后续的故障保护触发器由单独的系统级别和特定于的代码进行管理。
下面列出了主要的故障安全范围::
- 电池低电压
- 遥控器(RC)信号丢失
- 定位丢失/异常(GPS位置估算质量).
- Offboard丢失 (伴随电脑通信丢失等)
- 数据链路(数传)丢失 (比如地面站与自动驾驶仪通信丢失等).
- 突破地理围栏 (无人机已经突破虚拟地理围栏限制区域).
- 任务失败保护(防止先前的任务在新的起飞地点运行)。
- ADS保护 (由来自ADSB应答器的应答器数据触发).
更多故障保护信息: 故障保护
机头和航向
所有的无人机,无人船的航向都基于机头方向。
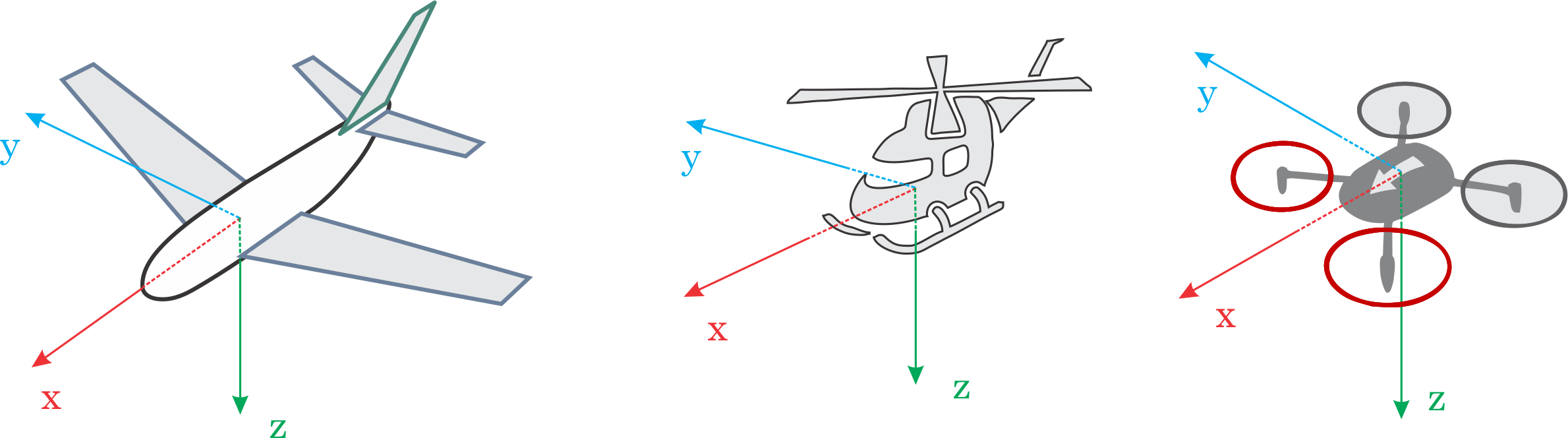
重要的是要知道无人机的机头方向,以便使自动驾驶仪与无人机的运动矢量对齐。 多旋翼无人机即使各个方向都堆成也必须有机头方向! 通常,制造商会应特殊的标记标记机头方向。
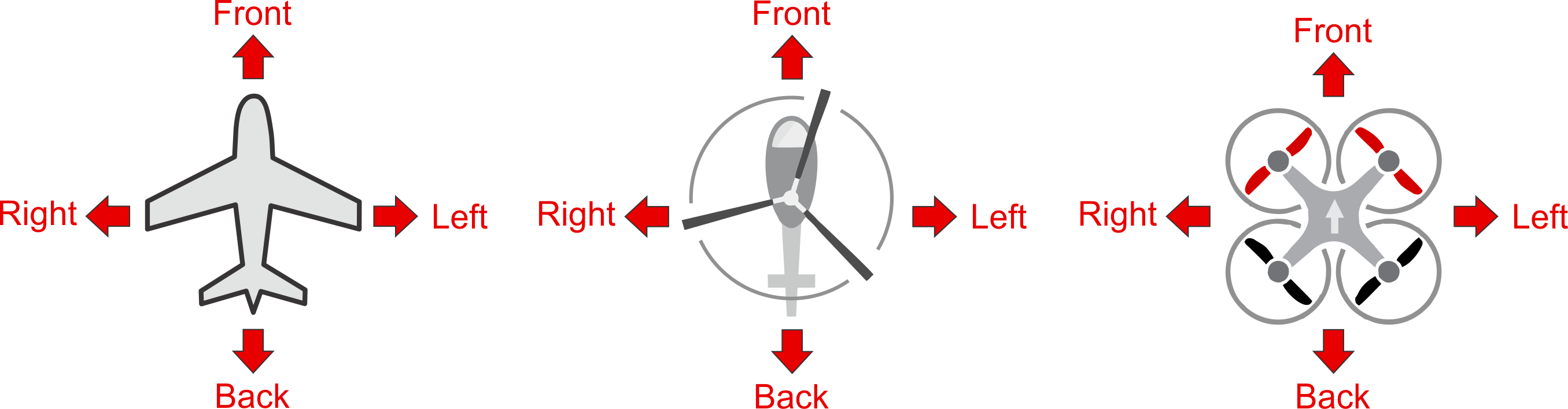
在我们的插图中,我们将为多旋翼飞机的前螺旋桨使用红色以显示航向。 您可以在《 Flight Controller Orientation》中深入了解航向.