避障
直升机3.5(及更高版本)使用以下方式支持水平向上对象避免:
360度激光雷达,包括Lightware SF40C,TeraRanger Tower或RPLidarA2 / A3
任何其他两个支持的激光雷达(如果您在将此定义更改为“4”后自行编译代码,则可以使用最多4个激光雷达)
能够提供MAVLink距离传感器消息的传感器(如带有3D摄像头的OpenKai)
水平对象避免在AltHold和Loiter模式下工作。 向上物体避障在除稳定和Acro之外的所有模式中都有效。有关如何实现对象避免的详细信息,请参阅开发人员维基
设置激光雷达
对于360激光雷达,请按照无人机上的激光雷达对应的说明进行操作 Lightware SF40C TeraRanger Tower RPLidarA2/A3 对于其他激光雷达,请按照此处的说明操作
配置避障
设置AVOID_ENABLE = 7(“全部”)以使用所有避障传感器,包括“距离”传感器 在Loiter AVOID_MARGIN:控制无人机试图停止的障碍物的距离 AVOID_BEHAVE允许设置无人机是否应该只是停在障碍物前面或在它周围滑动 在AltHold AVOID_DIST_MAX控制无人机开始向障碍物倾斜的距离。 AVOID_ANGLE_MAX控制无人机向障碍物的倾斜角度。
实时距离
在Mission Planner的静距离查看器中可以看到实时距离
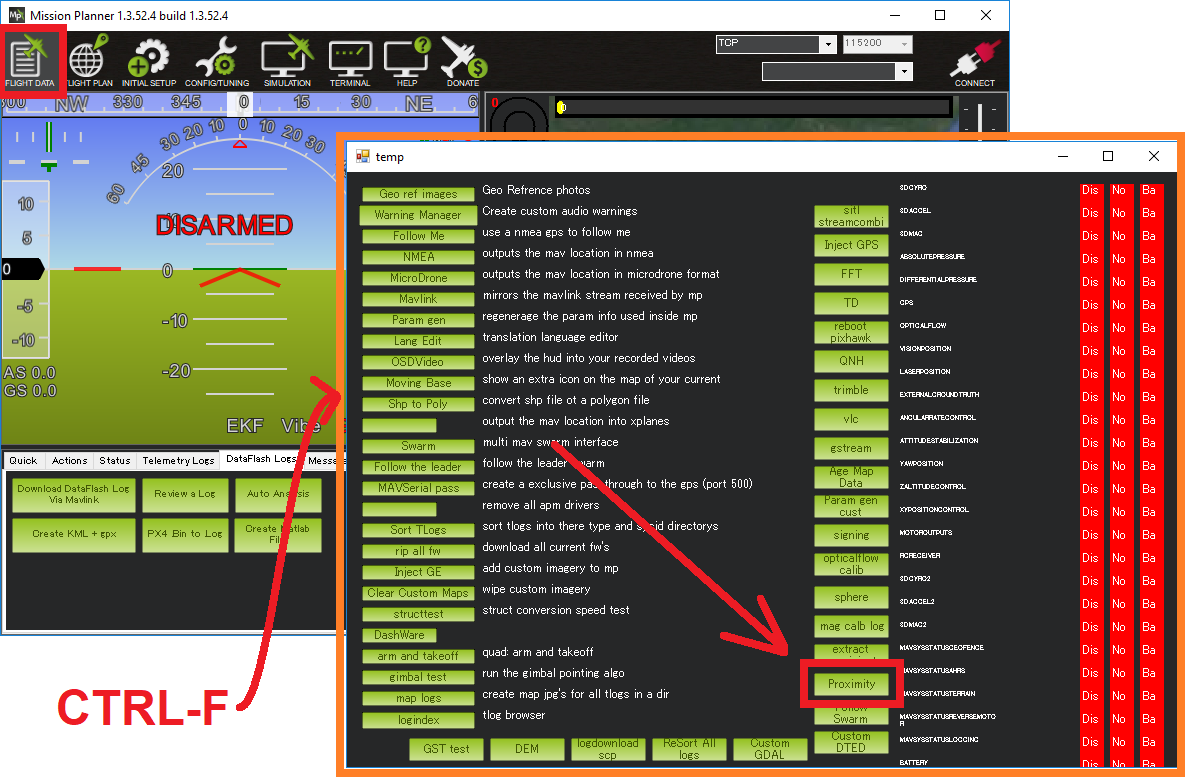
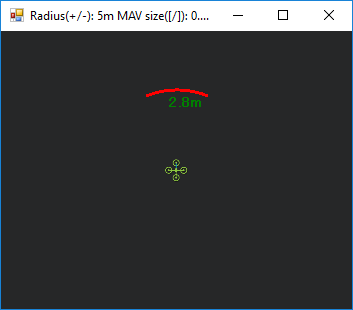 可以通过移动到MP的Flight Data屏幕打开此窗口,按Ctrl-F并按下Proximity按钮。
可以通过移动到MP的Flight Data屏幕打开此窗口,按Ctrl-F并按下Proximity按钮。
 DataFlash日志记录
在DataFlash Log的RFND消息中可以看到向上和向下的测距仪距离。
DataFlash日志记录
在DataFlash Log的RFND消息中可以看到向上和向下的测距仪距离。
在无人机周围8个象限中到最近物体的距离记录在DataFlash日志的PRX消息中。
限制
直升机的物体避免功能具有以下限制。 未来版本可能会解决这些问题。
对象避免仅适用于Loiter和AltHold模式 无人机在撞击物体之前应该停止,但是永远不会从靠近车辆的物体上退回(在未来的固件版本中将添加缓慢的后退) 避免是“基于传感器”意味着它没有构建3D地图,因此没有“记忆”一旦它们不在激光雷达的视野中的障碍