相机快门触发
pixhack/pixahwk支持设置相机快门触发,触发方式包括pwm/伺服及电平触发/继电器。
下面介绍一下两种触发方式的设置方法:
pwm(伺服)触发相机快门
这个方式原理是通过飞控给相机快门线(pwm快门触发线)发出pwm信号控制相机快门。
在设置前需要购买一条与相机适用的pwm快门触发线或者使用伺服(舵机)触发。
飞控设置方法如下:
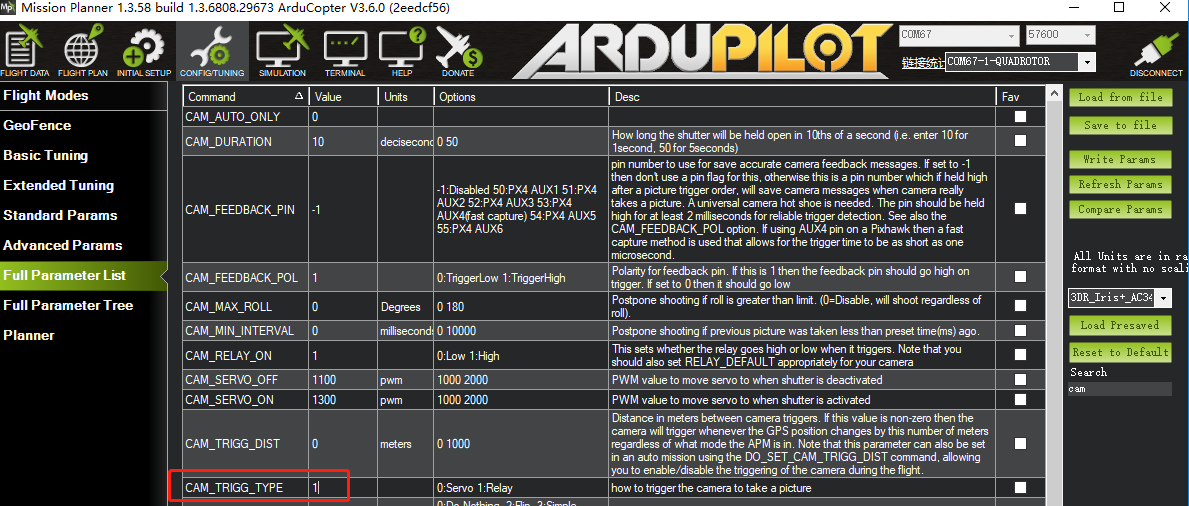
- CAM_TRIGG_TYPE:相机快门触发方式设置(0为伺服,1为继电器),应在全部参数表内设置该参数为0.
- 在初始设置》可选硬件》相机云台》快门》设置快门触发信号输出口(即从飞控那个接口输出pwm触发信号,注意aux1-6即servo9-12)可以根据需要设置舵机限位及快门pwm值
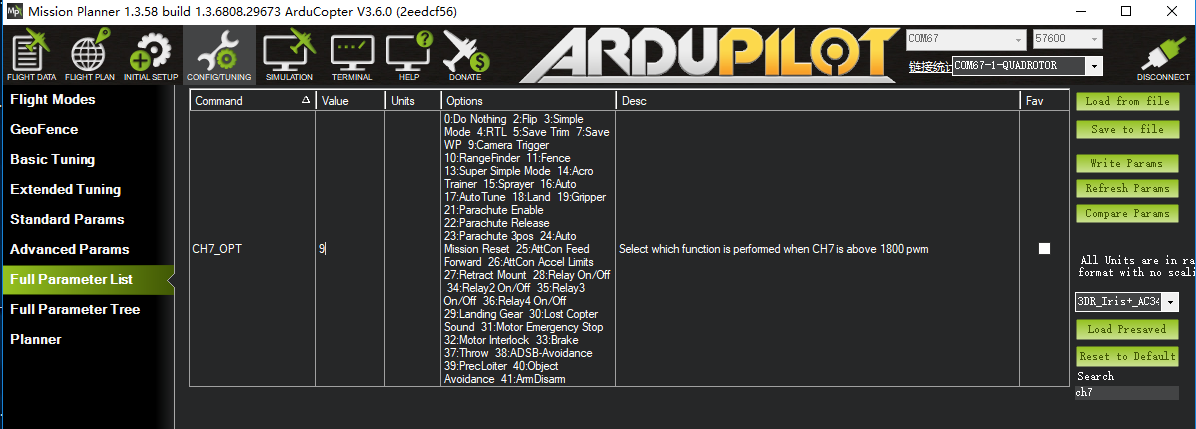
- 在配置/调试》全部参数表》修改ch7_opt参数为9》点击写入参数(该设置即为设置遥控器第七通道控制快门,请确保遥控器第七通道已经校准)
- 将快门/舵机线插入飞控对应的接口即可(如前面设置为servo9则插在飞控aux1/fs1).
继电器(电平)触发
CAM_TRIGG_TYPE:相机快门触发方式设置(0为伺服,1为继电器),应在全部参数表内设置该参数为1.
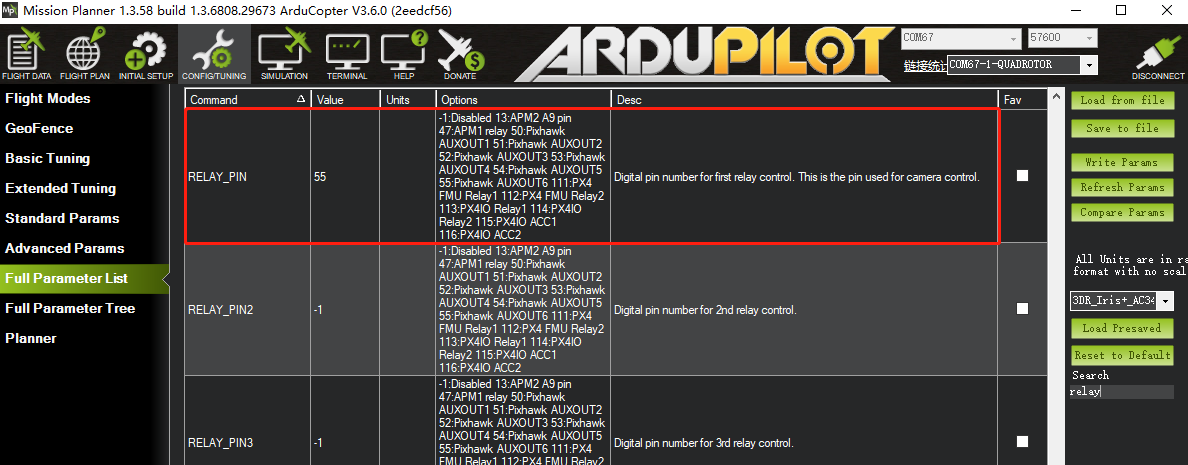
全部参数表》设置继电器引脚参数Relay_pin(如设置为55输出为AUX6引脚/V5飞控A6引脚、只有继电器1可作为继电器输出)
设置ch7_opt=9,并写入
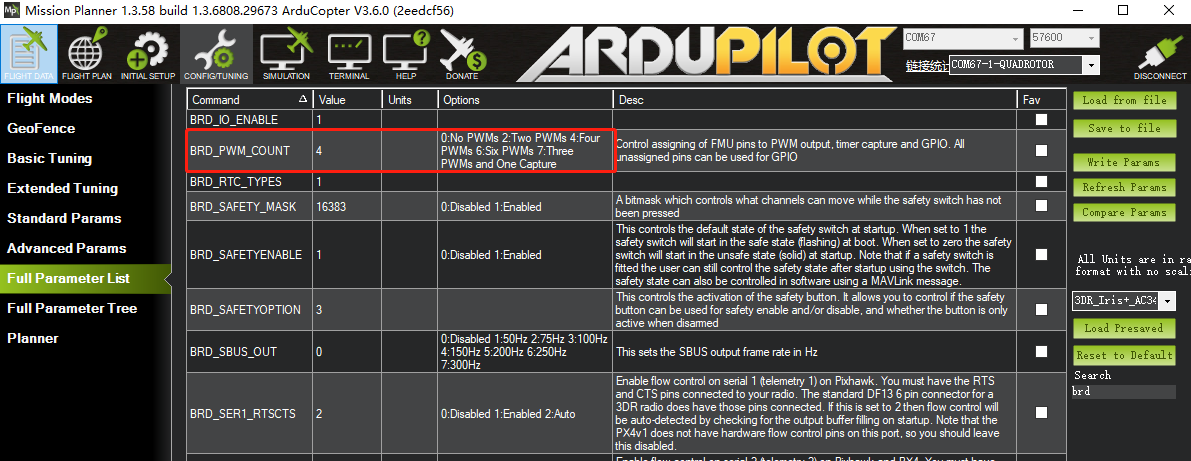
设置fmu_pwm输出数量brd_pwm_count(如使用aux6引脚请设置成4或者更小,否则aux6将被认为输出pwm信号)》写入参数》。
将快门线插入飞控对应的接口即可(如前面设置为54则插在飞控aux5/fs4/a5)
设置触发电平反相:
- relay_default:继电器开启状态
- CAM__relay_ON:继电器开闭状态电平设置
- 如相机快门是低电平触发则设置为继电器开启输出低电平
增强的相机触发记录
飞行控制器控制与相机快门反应存在一定的时差,对于高速飞行的飞行器来说,这个时差会带来拍摄点地理位置的偏差。为了更加准确的记录照片拍摄时间,ArduPilot引入了增强相机触发记录系统。
通过监视已连接到相机热靴的数字输入引脚,您还可以设置ArduPilot以在相机实际触发时记录CAM消息。
您需要将其中一个AUX引脚配置为数字输出/输入,并将其连接到相机闪光灯热靴(需要通用相机热靴)。引脚应保持至少2毫秒,以实现可靠的触发检测。
主要步骤是:
打开Mission Planner,然后单击CONFIG / TUNING |完整参数列表
使用BRD_PWM_COUNT参数将至少两个AUX引脚设置为数字输出/输入,如数字输出中所述。
将CAM_FEEDBACK_PIN设置为连接到热靴的引脚编号。
设置CAM_FEEDBACK_POL以指示拍摄照片时反馈引脚(热靴电压)是变高还是变低。