连接电机与电调
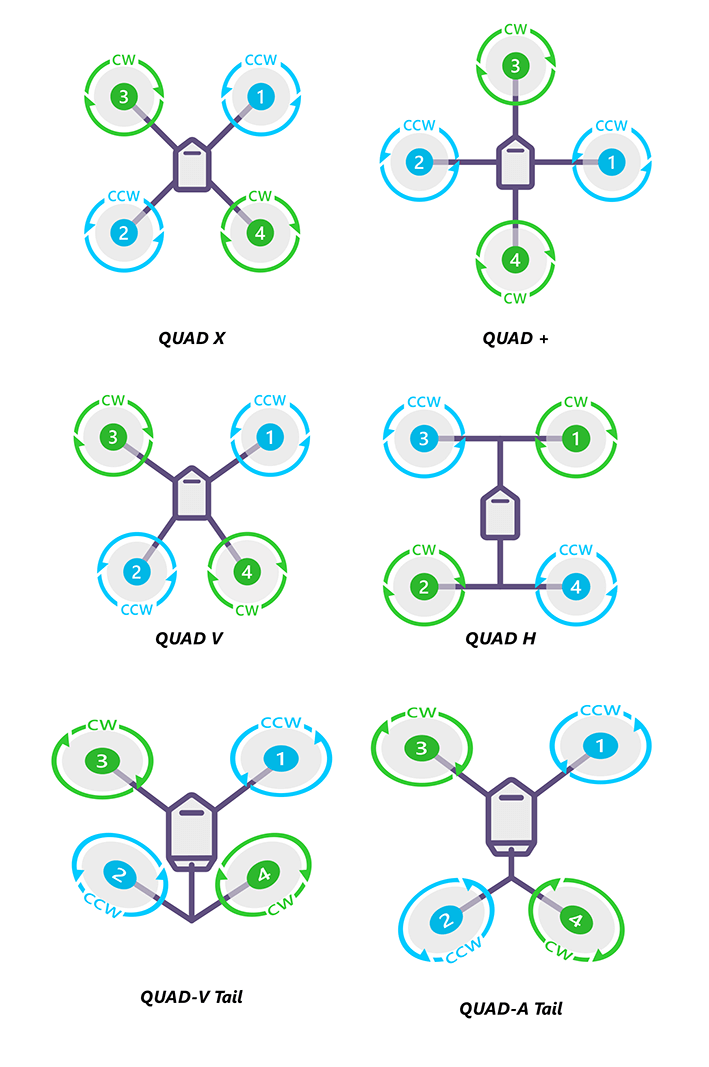
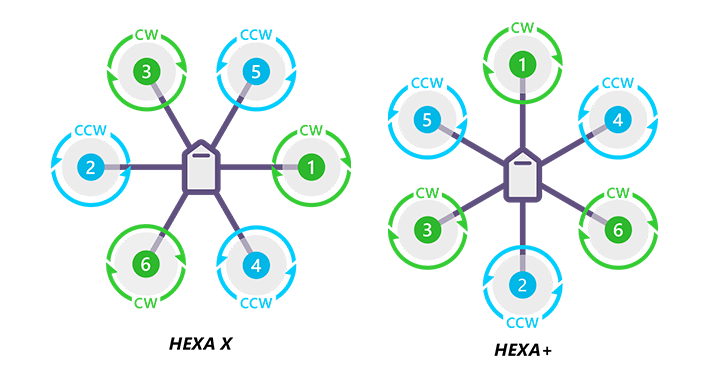
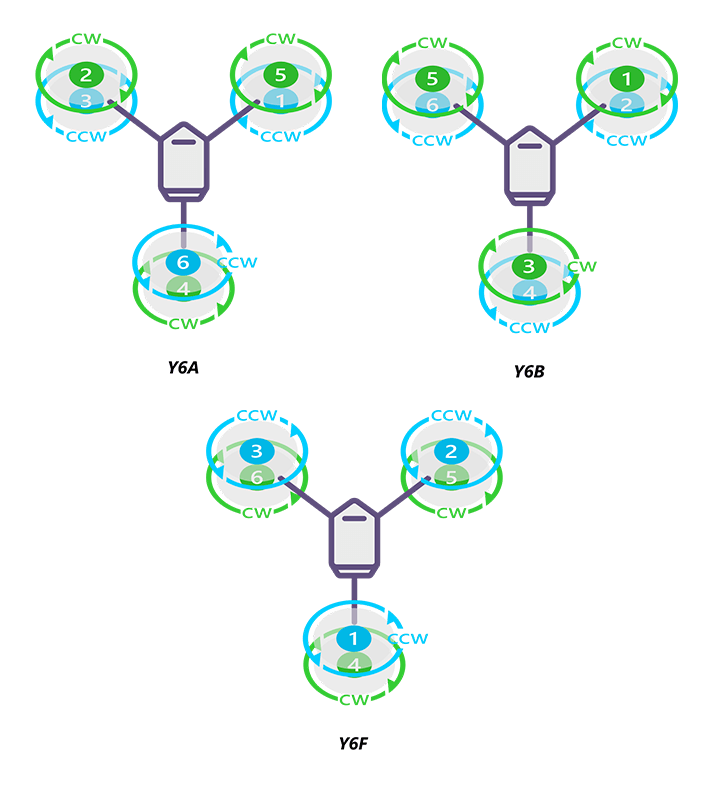
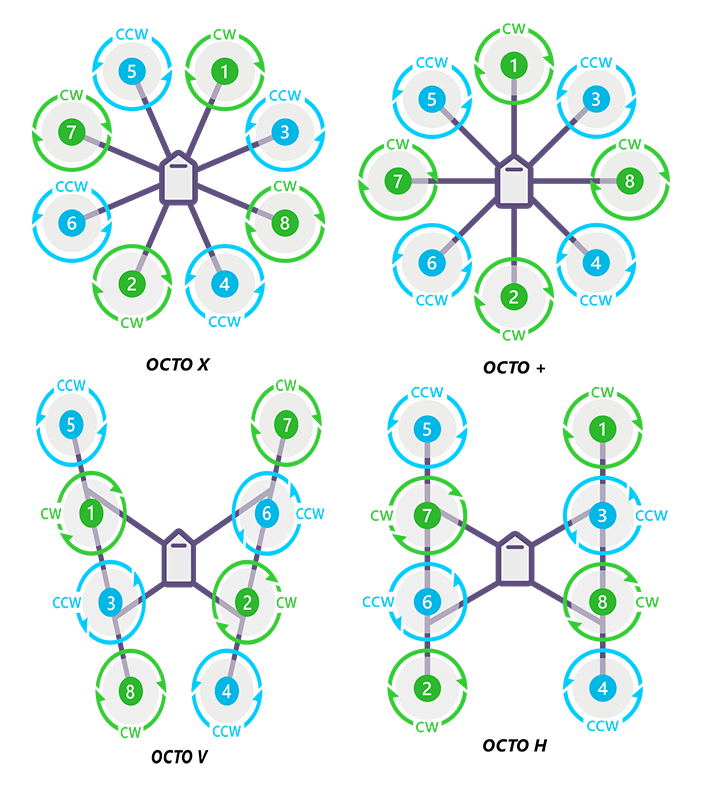
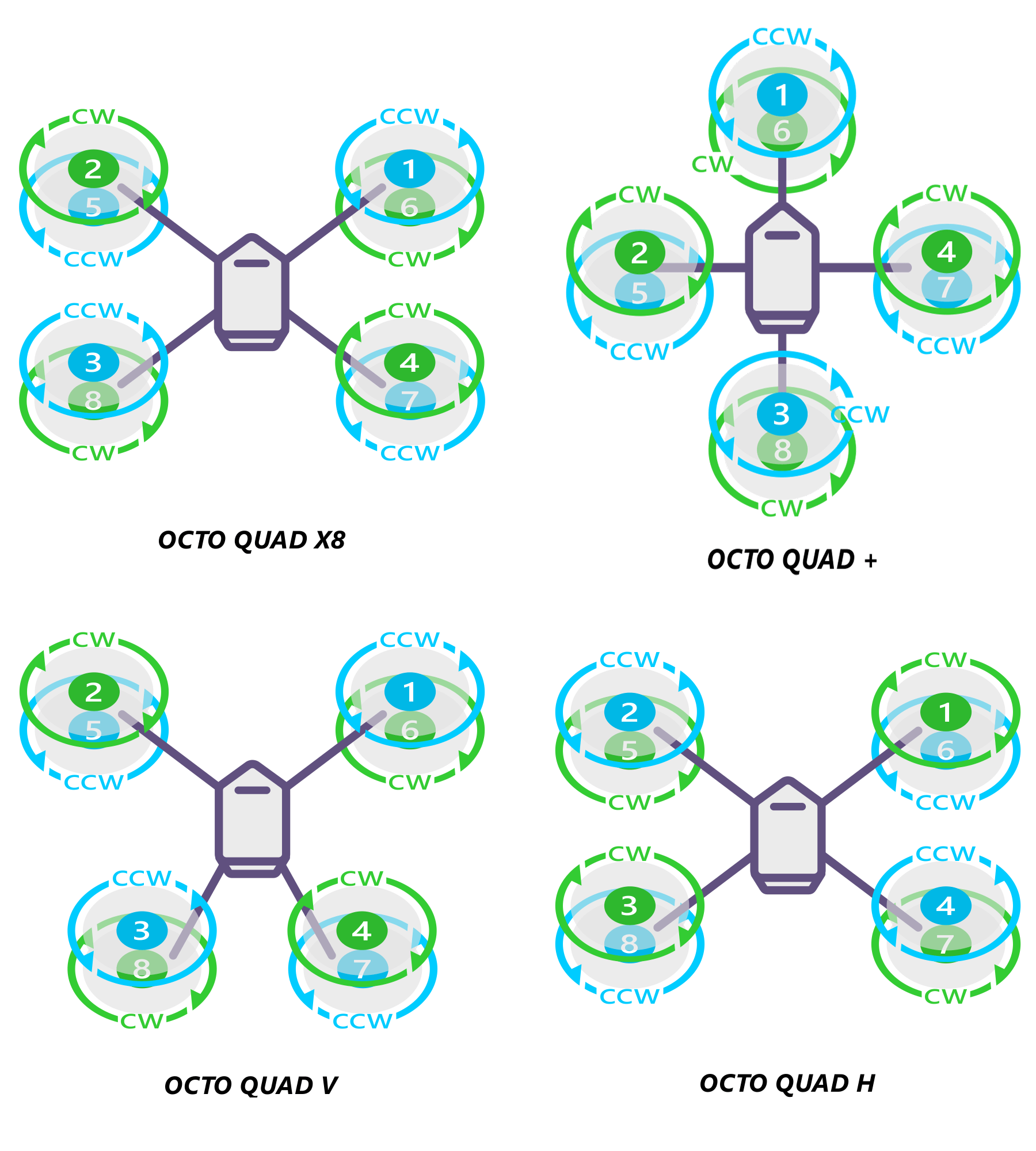
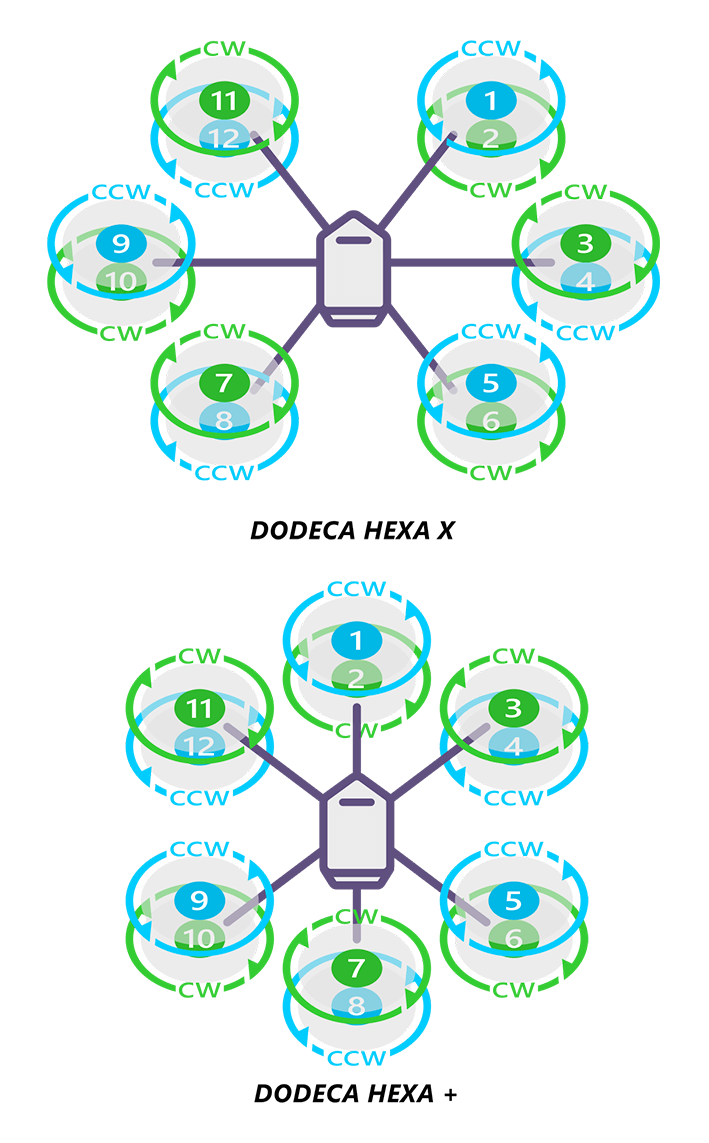
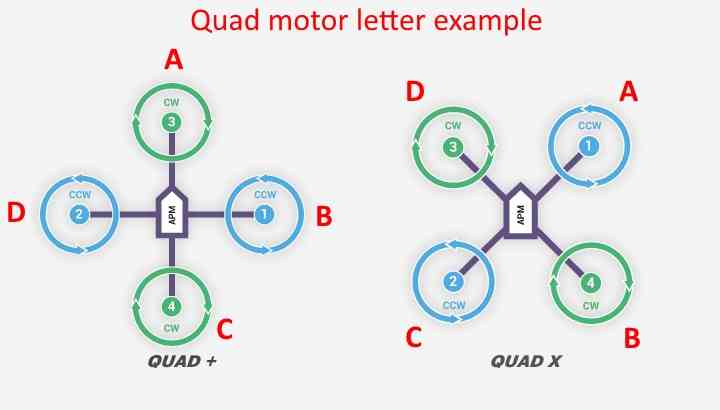
每种飞行器的电机顺序(里边的数字对应的飞控板的PWM输出端口)
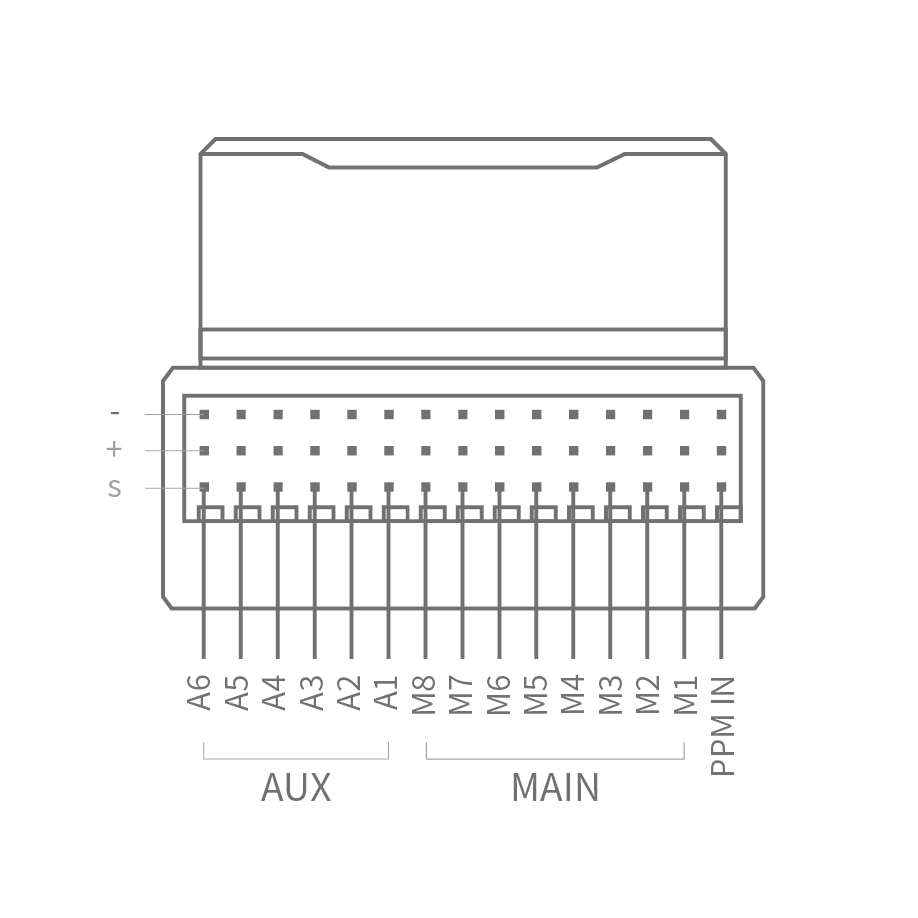
市面上常见的PIX飞控PWM端口顺序从MAIN M/S1算起,一直到Aux/CAP接口。
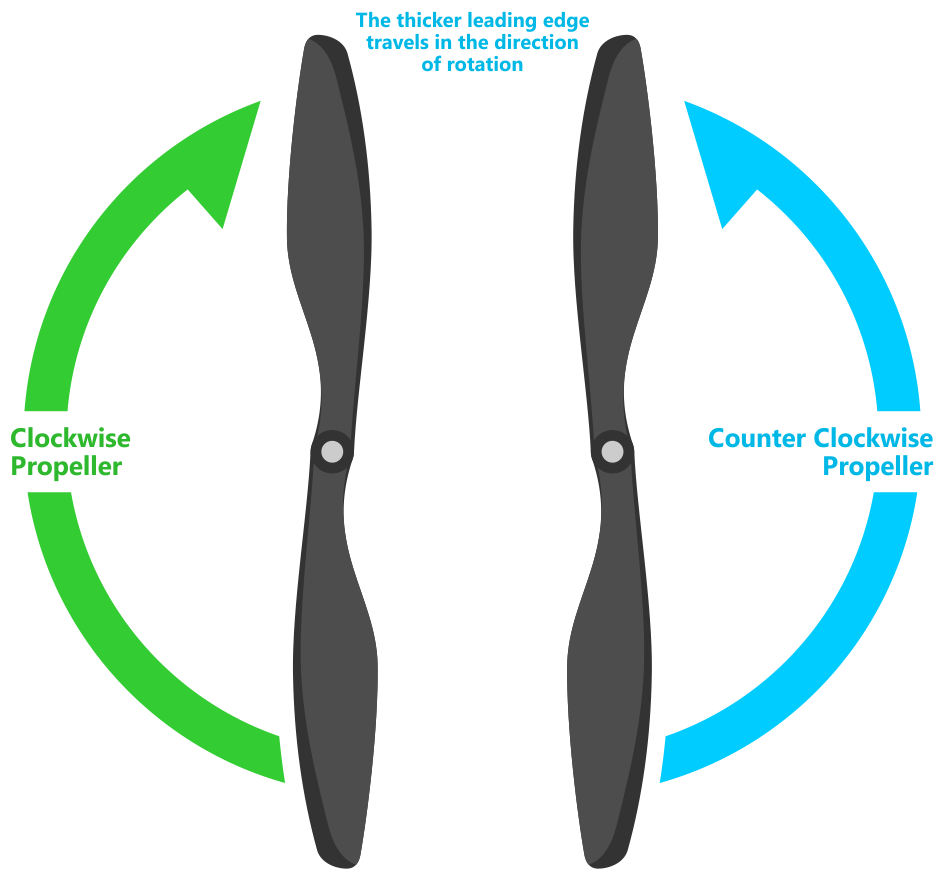
CW顺时针旋转,绿色图示;CCW逆时针旋转 ,蓝色图示

错误的硬件连接和固件类型,都会导致起飞就翻车/旋转/飞不起来,或者严重往一边倾斜,需要注意检查。
Quadcopter(四旋翼)
Tricopter(三旋翼)
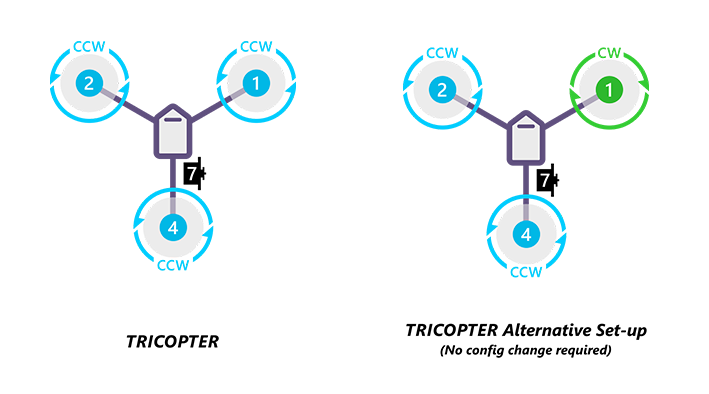
如果三旋翼飞行器尾舵方向反应错误,则RC7_REV或MOT_YAW_SV_REV参数应设置为-1(从1开始),有关详细信息,请参见TriCopter设置页面。)
Bicopter(三旋翼)

Hexacopter(六旋翼)
Y6(Y6)
Octocopter(八旋翼)
Octoquad(四轴八旋翼)
Octoquad(六轴十二旋翼)
识别顺时针和逆时针螺旋桨
上图显示了两种类型的螺旋桨:顺时针(称为推杆)和逆时针(称为拉杆)。如下所示,最可靠地通过其形状识别正确的螺旋桨类型。正面朝上时,翘起的那边为旋转方向的前边缘。
检查电机转向
如果您已完成电调油门行程校准,则可以检查电机旋转方向是否正确:
- 确保您的电机没有装螺旋桨(严禁装载螺旋桨测试电机转向)
- 打开遥控器发射器,并将飞行设置为“自稳模式(Stabilize)”
- 连接电池
- 按住油门放置最低,方向舵最右保持五秒钟,解锁。
- 如果无法解锁,并且电机不会转,则可能是遥控器未校准或者未通过安全检查,连接地面站看错误提示。
- 解锁后,施加少量的油门,观察并记录每个电机的旋转方向。它们应与您选择的框架的上图中所示的方向匹配。
- 反转任何旋转方向错误的电机(常用电机电调一般只需要将电调和电机的任意两根连接线交叉连接即可反转电机转向。)
使用Mission Planner电机测试检查电机编号
检查电机是否已正确连接的另一种方法是使用“Mission planner初始设置”菜单中的“电机”测试。
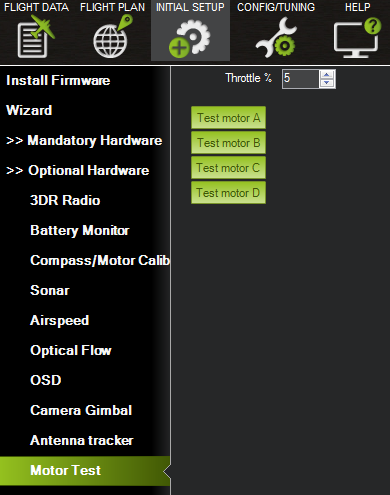
飞控连接地面站后,您可以单击上面显示的绿色按钮,相应的电机应旋转五秒钟。字母与电机编号相对应,如下例所示。
- 首先卸掉螺旋桨!
- 如果没有电机转动,将“油门”提高到10%,持续时间加长,然后重试。如果不起作用,请尝试15%。
“+”字形机架,第一个旋转的电机将直接位于正前方,在"X"形机架,第一个旋转的电机将在右前方,然后,电机测试字母将以顺时针方向顺序递增。
在X8的机架下,它将先旋转右上方的顶部电动机,然后旋转右下方的底部,并以相同的模式进行旋转。
OctoV将首先旋转右前电动机,然后再次顺时针旋转直到到达左前电动机。