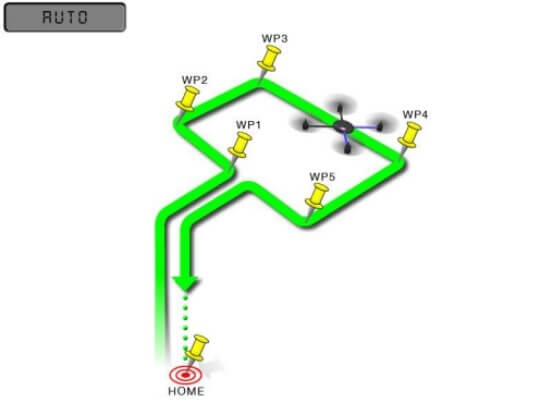
自动模式
在自动模式下,飞行器按照内部的任务脚本控制它的动作,任务脚本可以是一组航点,也可以是非常复杂的动作如:起飞、旋转X次、照相等。
自动模式依赖于GPS,因为任务脚本依靠GPS获得位置信息,所以在解锁和起飞之前必须让GPS先定位。 确保在自动驾驶仪和GPS模块上的LED灯表示的是GPS已完成定位:
APM上的蓝色LED常亮。
GPS模块上的蓝色LED常亮。
GPS+罗盘模块上的LED闪烁。
注意:
在自动模式下,飞控主要使用测量空气压力的气压计决定高度(“压力高度”),并且如果在你的飞行区域气压改变,飞行器会随着气压而不是真实高度去改变高度(除非你安装并启用了声呐在离地6米以内飞行)。
在地面和空中使用自动模式
有两种方法进入自动模式:在空中或者在地面上。 如果你要从地面使用自动模式起飞,有个特殊的安全装置防止任务脚本执行,直到你解锁然后首次抬高油门。 这是为了防止在不小心碰到模式开关时你的飞行器就起飞了。 从地面使用自动模式起飞时,你最近一次的定高油门值作为油门控制的基准。 一旦飞行器起飞就会飞向第一个目标高度,然后开始执行之后的任务脚本。
当你已经在空中的时候切换到自动模式,会使你的飞行器前往第一个目标高度,然后开始执行当前的任务脚本。
调试
Waypoint_Speed的值用来设置两个航点间的飞行速度。
两个航点间的默认速度为6米每秒。
NAV_PI用于让你的飞行器在两个航点间保持期望的飞行速度。
NAV_P用于倾斜飞行器以达到期望飞行速度的速率, 使其速率变快 或是没有速度。
P越大飞行器倾斜的就越大。
Nav_I用于补偿外部会使飞行器达不到期望速率的力。
高I值会快速达到期望的速率,也会快速减慢避免飞过头。
结束任务
任务脚本完成之后,飞行器不会飞回“home”点,它只会悬停在最后的脚本所在的位置直到你通过模式开关重新获得控制。 如果你想要飞行器飞回“home”点,你可以添加一个RTL(返航)命令结束你当前的任务脚本。 如果你想要手动降落然后锁定电机(比预编程的自动降落命令更好),你必须切换到自稳模式。
记住,当使用RTL时,飞行器将返回“home”点(在GPS定位之后飞行器解锁时的位置),所以当你使用自动模式的时候,选择一个你希望飞行器返回的位置(没有障碍物并且远离人群)来解锁非常重要。
警告: 重点要了解“home”点始终使用的是你的飞行器解锁时的实际位置!
在任务脚本最后位置的RTL或是自动降落会强制降落然后停止电机。 你不能在自动模式手动降落,除非已配置以上两个选项之一,因为油门摇杆控制高度,并不是直接控制电机。