LightWare SF10 and SF11 Lidar / SF10 SF11激光测距模块
Lighware SF10和SF11系列激光测距仪特别轻便,可提供快速准确的距离测量。
虽然比其他测距仪稍微贵一些,但是开发团队的成员与他们取得了很好的成功。
SF10 / A(25m),SF10 / B(50m),SF10 / C(100m)和SF11 / C(120m)

连接到Pixhawk
下面的图表显示了传感器输出引脚和一个方便的彩色编码电缆(通常包括在内),用于连接到飞行控制器。串行,I2C和模拟连接是可能的,但我们建议使用serialialif(见这里的问题)。
提示
建议在使用较长的电缆或使用Copter时使用串行连接(请参阅此处的问题)
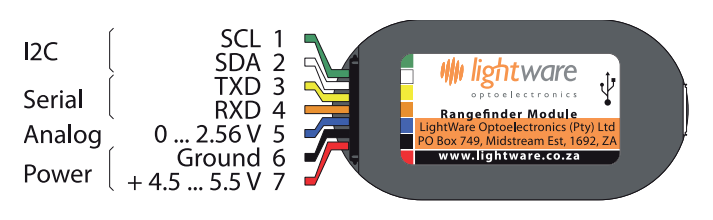
SF10测距仪:输出引脚
SF10测距仪
主要电缆
串行连接
对于串行连接,您可以使用任何备用UART。 将UART的RX线连接到Lidar的TX线,将UART的TX线连接到激光雷达的RX线。 同时连接GND和5V线。 您不需要流量控制引脚。
下图显示了如何连接到SERIAL4。
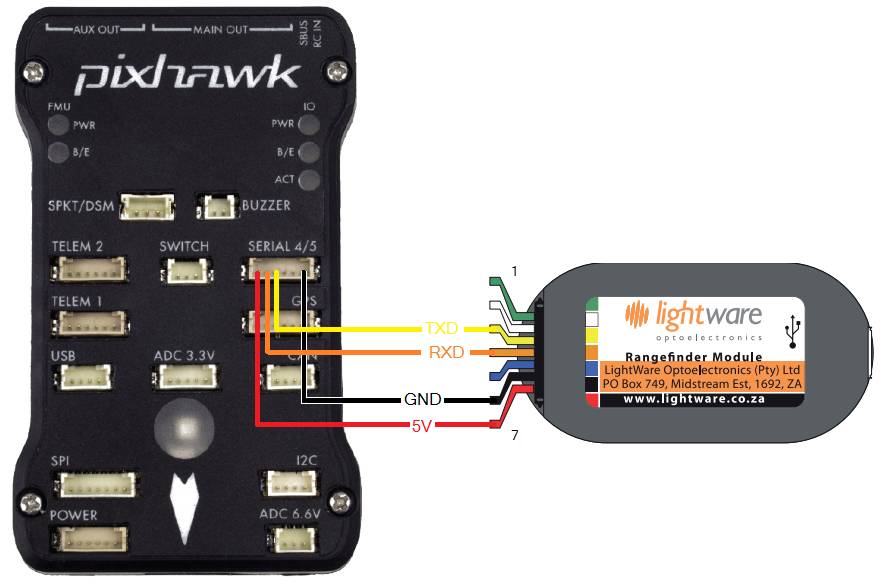
Pixhawk / Pixhack和SF10Rangefinder:串行连接(SERIAL4)
然后您需要设置串口和测距仪参数。 如果您已经使用了Pixhawk上的SERIAL4 / 5端口,那么您将设置以下参数(在Mission Planner配置/调整|完整参数列表页面中完成):
SERIAL4_PROTOCOL = 9(激光雷达)
SERIAL4_BAUD = 19(19200波特)
RNGFND_TYPE = 8(LightWareSerial)
RNGFND_SCALING = 1
RNGFND_MIN_CM = 5
RNGFND_MAX_CM = 2500(对于SF10A),5000(对于SF10B),10000(对于SF10C)或12000(对于SF11C)。 测距仪可以可靠读取的距离是厘米。 该值取决于激光雷达的模型。
RNGFND_GNDCLEAR = 10或更准确地说,当车辆着陆时从测距仪到地面以厘米为单位的距离。 这个值取决于你如何安装测距仪。
如果您使用的是Pixhawk上的Telem2端口,那么您将设置SERIAL2_PROTOCOL = 9,SERIAL2_BAUD = 19200
I2C连接
警告
平面3.4(及更高版本)和Rover 2.50(及更高版本)中均支持I2C支持,但不应用于直升机(请参阅此处的问题)。
将Lidar的SDA线连接到Pixhawk上的I2C端口的SDA线,将Lidar的SCL线连接到I2C端口的SCL线。 同时连接GND和5V线。
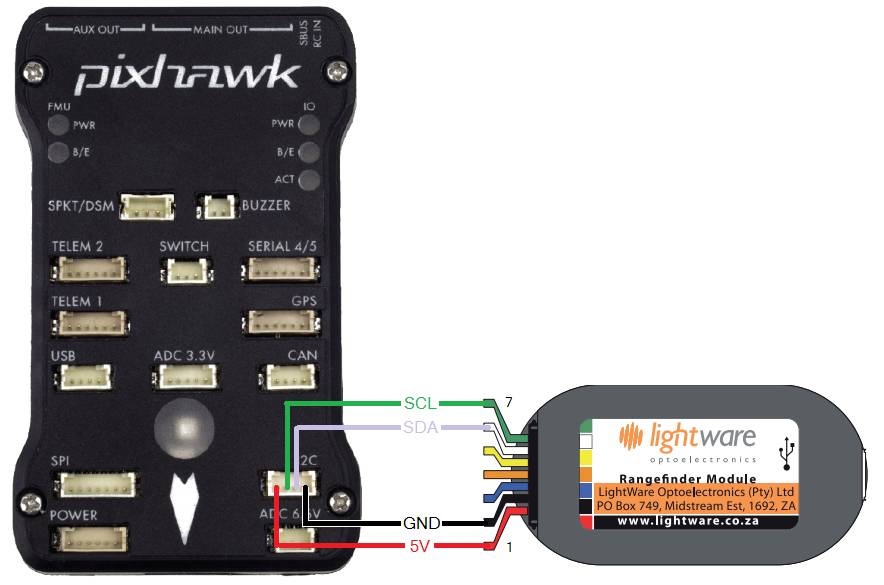
P
ixhawk和SF10测距仪:I2C连接
然后您需要如下所示配置测距仪参数(这在Mission Planner配置/调整|完整参数列表页面中完成):
RNGFND_TYPE = 7(LightWareI2C)
RNGFND_ADDR = 102(十进制激光雷达的I2C地址)。请注意,此设置是十进制而不是十六进制,如激光雷达设置屏幕所示。默认地址是0x66,十进制是102。
RNGFND_SCALING = 1
RNGFND_MIN_CM = 5
RNGFND_MAX_CM = 2500(对于SF10A),5000(对于SF10B),10000(对于SF10C)或12000(对于SF11C)。测距仪可以可靠读取的距离单位是厘米。该值取决于激光雷达的模型。
RNGFND_GNDCLEAR = 10或更准确地说,当飞行器着陆时从测距仪到地面以厘米为单位的距离。这个值取决于你如何安装测距仪。
警告
旧的LightWare测距仪的默认I2C地址是0x55。
这是为了防止与ArduPilot上的其他设备发生冲突。
请检查您的测距仪系统设置,以确定您的I2C地址是什么。
Analog连接
SF10的模拟输出引脚(5)应连接到Pixhawk的3.3V ADC(模数转换器)。 Pixhawk将使用ADC连接器的5V和GND引脚提供传感器所需的稳压5V电源。
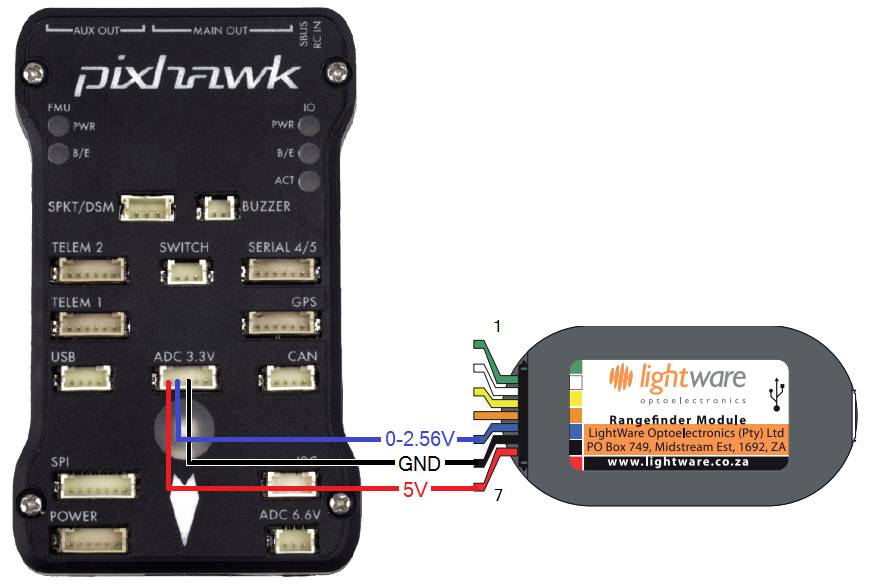
Pixhawk和SF10测距仪:模拟连接
您需要设置ADC和测距仪参数,如下所示(在Mission Planner配置/调整|完整参数列表页面中完成):
RNGFND_TYPE = 1(模拟)
RNGFND_PIN = 14(3.3V ADC连接器的第2个引脚)
RNGFND_SCALING = 9.76(对于SF10A),19.531(对于SF10B),39.06(对于SF10C),46.87(对于SF11C)
RNGFND_MIN_CM = 5
RNGFND_MAX_CM = 2000(对于SF10A),4500(对于SF10B),9500(对于SF10C)或11500(对于SF11C)。测距仪可以可靠读取的距离是厘米。该值取决于激光雷达的模型。注意范围比使用串行或I2C协议少5米,以便可以可靠地检测到超出范围
RNGFND_GNDCLEAR = 10或更准确地说,当车辆着陆时从测距仪到地面以厘米为单位的距离。这个值取决于你如何安装测距仪。
RNGFND_SCALING值取决于最大量程范围内测距仪输出引脚上的电压。默认情况下,SF10 / B将在50米处输出2.56伏,因此比例因子为50米/2.56伏≈19.53(每种测距仪型号的模拟距离范围可在“SF10手册”中找到)。手册介绍了如何确认和更改最大输出范围/电压。
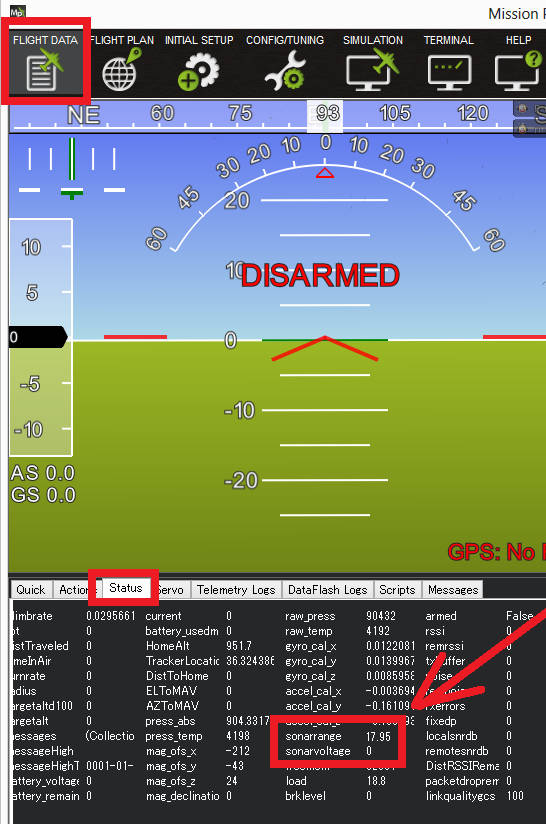
测试声呐数据
在MP地面站--飞行数据窗口--状态 选项栏 查看 “sonarrange” 数值
注意:设置好后,你需要重新上电才能生效