继电器开关
“继电器”是APM或Pixhawk上的数字输出引脚,可以在0V和3.3V(Pixhawk)或5V(APM2)之间切换。
与伺服类似,它允许飞行控制器从车辆上的另一个装置调用一些动作。
在Copter,Plane和Rover中,最多可以将4个引脚定义为继电器。
Pixhawk/pixahck上的继电器引脚
Pixhawk AUX OUT 5(引脚54)和AUX OUT 6(引脚55)分别设置为“第一”(或#0)和“第二”(或#1)继电器。

通过减少用作伺服输出的AUX引脚的数量,可用继电器的数量可以增加到最多6个。 可以通过BRD_PWM_COUNT修改继电器数量。
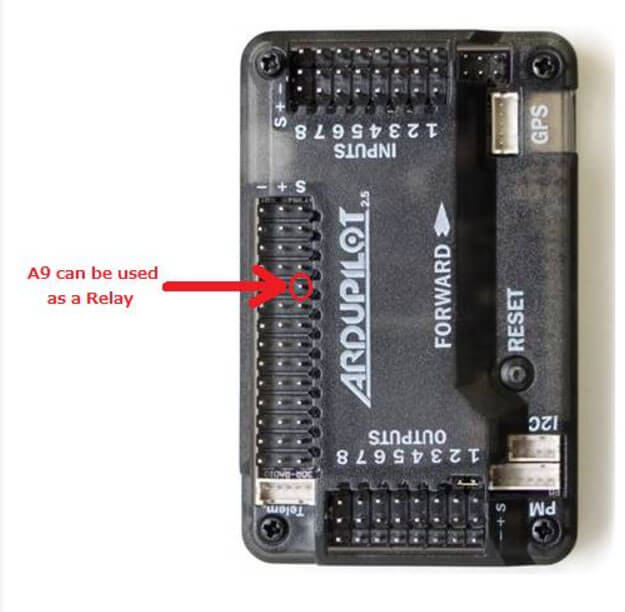
APM2上的继电器引脚
在APM2上,A9(引脚9)是推荐用作继电器的引脚。 事实上,A0〜A8的任何一个引脚都可以作为继电器使用,但是必须通过Mission Planner的完整参数列表手动设置RELAY_PIN参数(“0”〜“8”)。
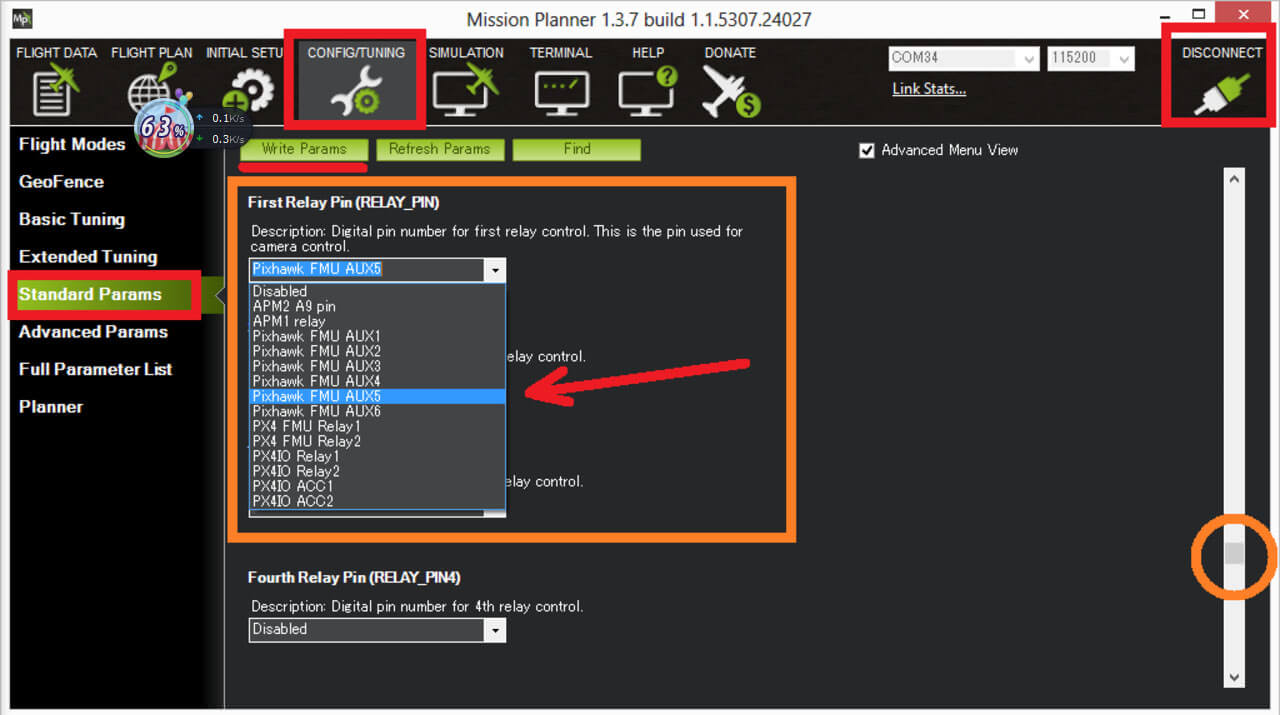
通过Mission Planner定义继电器引脚
使用任务规划器的配置/调谐屏幕的标准参数列表,可以最容易地定义第一〜第四个继电器引脚,如下所示。 或者,如果您知道要使用的确切引脚编号,则可以直接通过任务计划程序的完整参数列表设置RELAY_PIN参数。
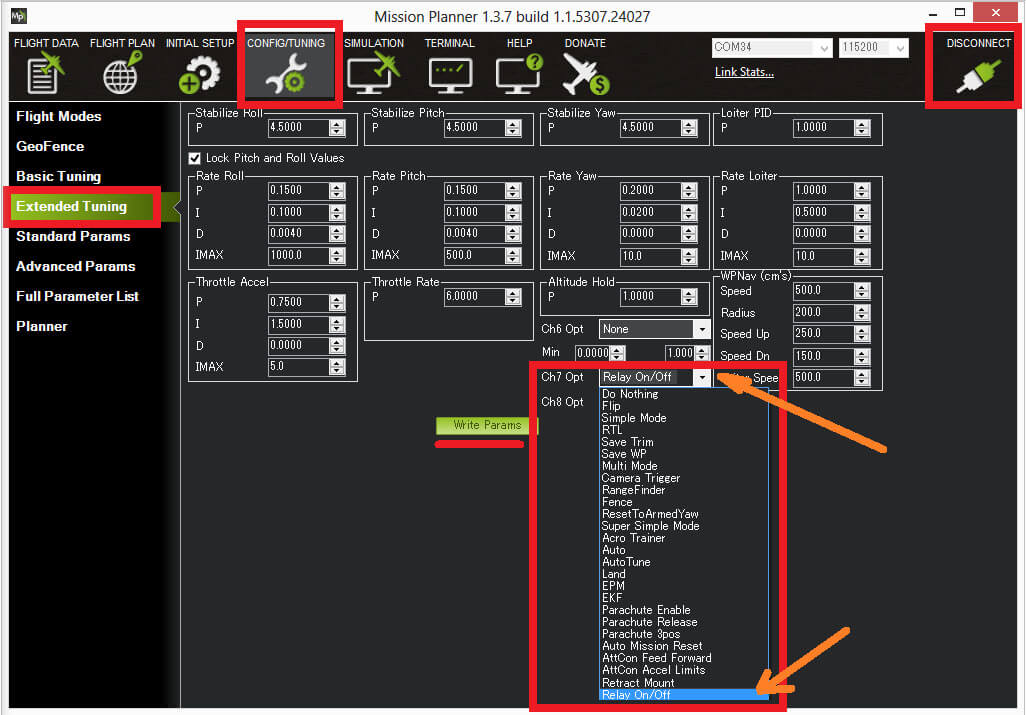
继电器的先导控制
在Copter 3.2(及更高版本)上,可以使用Ch7 / Ch8开关控制“First”继电器。
继电器的任务控制
与伺服类似,使用Do-Set-Relay任务命令可以在任务期间激活继电器。
wiki原文介绍链接:http://ardupilot.org/copter/docs/common-relay.html