精确登陆和与IR-LOCK的悬停
概述
直升机3.4(及更高版本)使用IR-LOCK传感器和声纳或激光雷达支持精确着陆。 使用该系统,当飞行器进入LAND模式(并且具有GPS锁定)时,可以可靠地着陆在IR信标的30cm内以小于1m / s的速度移动。
直升机3.5(及更高版本)还支持Precision Loiter(精确位移),允许飞行器在Loiter模式下将其位置保持在目标之上。 飞手可以使用变送器的辅助功能开关中的一个来启用。
连接到Pixhawk
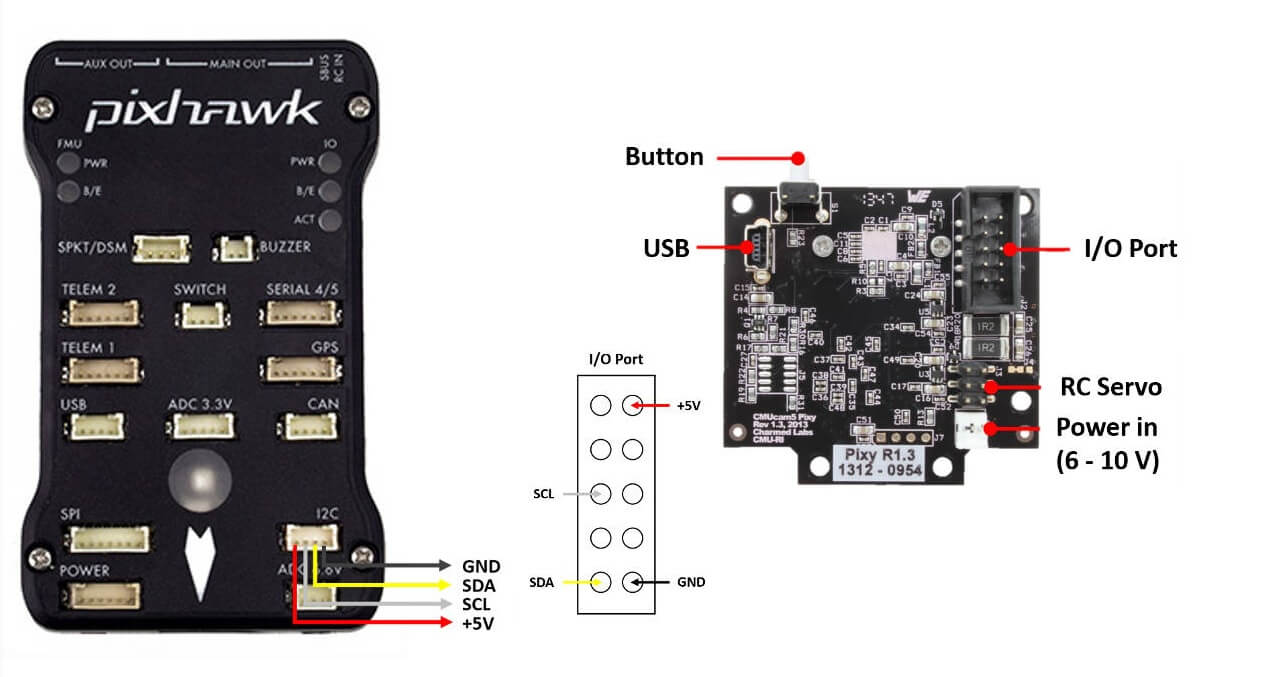
IR-LOCK传感器可以直接连接到Pixhawk的i2c接口。 如果 你是使用多个I2C传感器,那么您将需要一个I2C转接板。 更详细的说明包含在irlock.com文档。 IR-LOCK传感器也是可以通过USB连接到Linux系统, 传感器输出在Python中检索。
 安装到机架
安装到机架
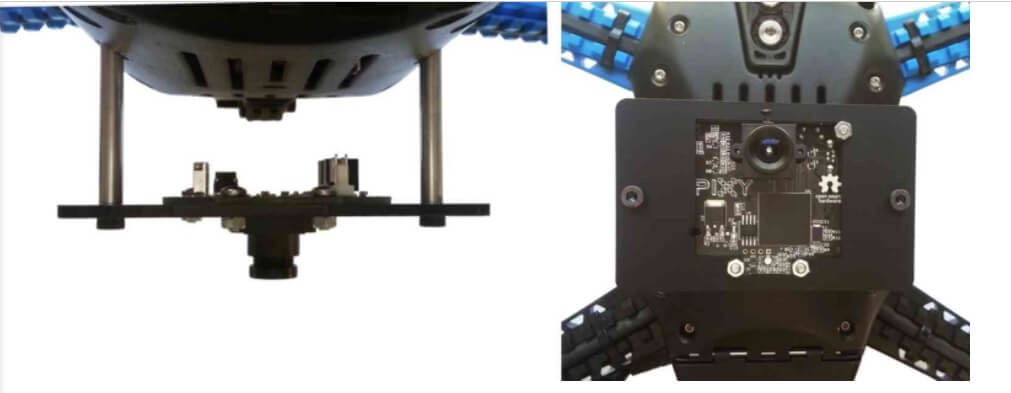
IRLOCK传感器应安装在机架的下面,相机镜头直接指向地面。 传感器板的方向应使得电路板上的白色按钮指向车辆的前部(或换句话说,离镜头最近的一侧应该朝向车辆的前部)。
下图显示安装在3DR IRIS +底部的相机。 建议尽可能靠近Pixhawk安装传感器。
通过Mission Planner设置
通过Mission Planner(或其他GCS)设置以下参数,启用精确降落功能,然后重新启动飞行控制器。
PLND_ENABLED = 1
PLND_TYPE = 2
要启用Precision Loiter,辅助功能开关必须设置为“Precision Loiter”:
CH7_OPT = 39
飞行和测试
设置land为飞行模式之一(截至本维基页面写入时,精确着陆功能仅在LAND模式下运行)。
将红外信号灯放在地面上,并在目标上方约10米处飞行。 将飞行器切换至LAND。 如果一切工作正常,直升机应该移向红外信标。 下面显示了一个成功的演示(使用较旧的固件)。
注意:
为防止意外情况,请时刻准备夺回控制权(通过切换模式至定高或留待)
如果车辆行为正常,则下载数据闪存日志并检查PL消息。
如果“heal”(meaining health)状态不是“1”,那么Pixhawk和IR-LOCK传感器之间可能通信。
如果“TAcq”(意思是目标获取)字段不是“1”,那么传感器没有看到目标。
pX,pY值显示从飞行器到目标的水平距离。
vX,vY值显示目标相对于飞行器的估计速度。
参考IR-LOCKwiki页面更多的故障信息。
本文引自:http://ardupilot.org/copter/docs/precision-landing-with-irlock.html