Maxbotic模拟声纳 - Copter3.2
XL-Maxbotic-EZ系列模拟声纳(XL-MaxSonar-EZ0,EZ4和EZL0)价格相对便宜,短程(7-10米)测距仪主要设计用于室内使用,但已成功应用于直升机和汽车。 这些是I2C声纳的前身。
这些说明适用于Plane,Rover的Copter 3.2和更高版本。
EZ4(推荐)具有最窄的光束,提供最佳的抗噪性,而EZ0具有最宽的光束和更高的灵敏度。 远程EZL0具有与EZ0相同的灵敏度,但是具有10m范围(而不是7m)。
连接到Pixhawk/PIXHACK
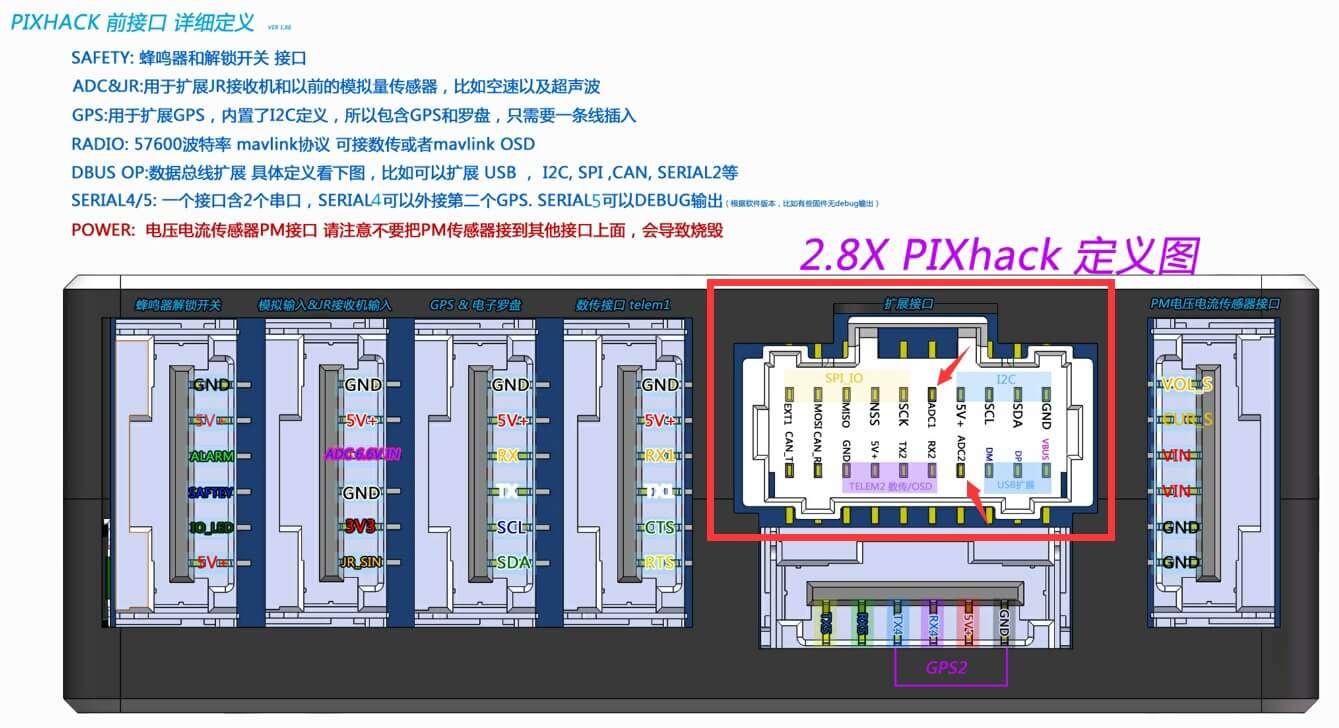
声纳应连接到Pixhawk/pixhack的ADC 3.3V端口,如下所示。 Pixhawk将提供声纳所需的稳压5V电源。

 连接到APM2.x
连接到APM2.x
声纳应连接到APM的A0端口,如下所示。 APM将提供声纳所需的稳压5V电源。

通过mp地面站调试
请首先连接Mission Planner,然后打开配置 / 调试 >> 全部参数表页面并设置以下参数:
用于Pixhawk ADC 3.3V针脚#2的RNGFND_PIN =“14”或APM2.x的“A0”
如果使用EZ0或EZ4,则RNGFND_MAX_CM =“700”(即7m最大范围),如果使用EZL0则为“1000”
如果使用EZ0或EZ4则RNGFND_SCALING =“2.04”(即7m / 5v),如果使用EZL0则为“4.08”(即10m / 5v)
RNGFND_TYPE =“1”(模拟)
Maxbotix模拟测距仪根据其数据手册输出Vcc / 1024伏/厘米,或者当提供5v(ADC 3.3v端口提供的)时为0.488v / m,转换为每伏2.04米。 根据数据表,范围是7.6m,但模拟输出限制在7m。 因为我们只能读到3.3v,那么就意味着6.75m是最大测量距离。
测试传感器
在mp地面站飞行数据屏幕状态栏中可以看到传感器读取的距离。 仔细看“sonarrange”。
