自动学习油门摇杆悬停点
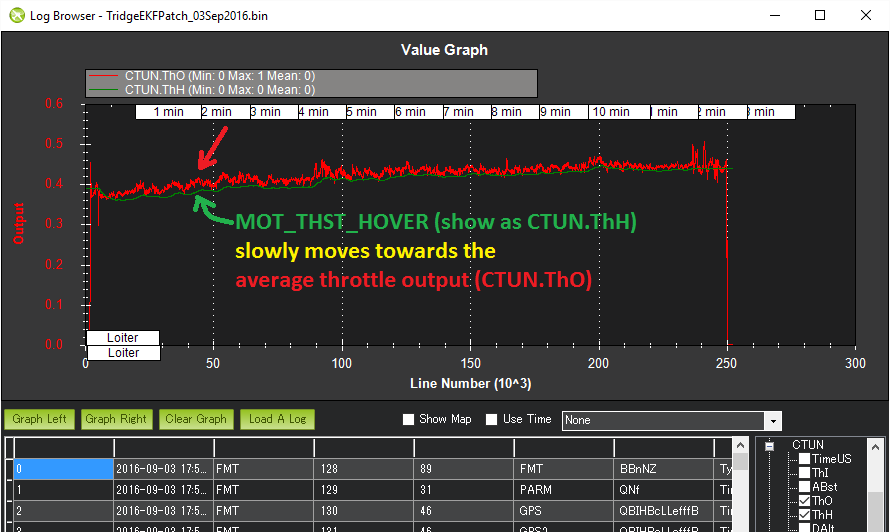
在APM:CPOTER 3.4版本以上固件,已经新加入了一个自动学习油门悬停点的功能,避免了从自动的模式(AUTO 、loiter)到增稳模式出现掉高或者快速爬升的问题。
如果由于某种原因,你想手动禁用自动学习功能,你可以把MOT_HOVER_LEARN参数设置为0。
手动测试和设置油门选停中立点 (目前的版本已经没有手动调整的参数)
如果你有一个动力过猛或者动力不足的飞行器,在增稳模式下,保持飞机悬停的油门可能在低于40%或者大于60%,这虽然可以在增稳模式很好的飞行,但是会导致一个问题,切换到 悬停模式或者自动模式,会导致上升和下降。或者从 悬停loiter 定点 模式切换到增稳模式导致快速上升或者下降出现事故。
调整过程:
- 关闭 MOT_HOVER_LEARN参数,设置为0
- 使用 增稳模式 飞行至少30秒-1分钟
- 降落后,上锁会自动保存日志。通过USB或者数传下载 本次的飞行日志.
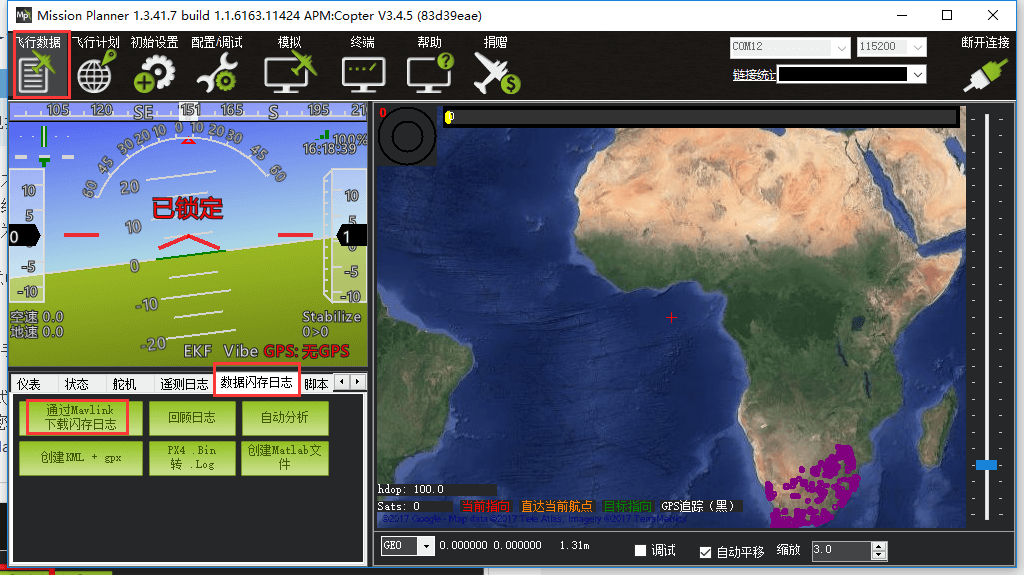
- 地面站
>
>
飞行数据
>
>
数据闪存日
>
>
通过mavlink下载闪存日志。
- 滚动日志,直到找到ThrOut参数
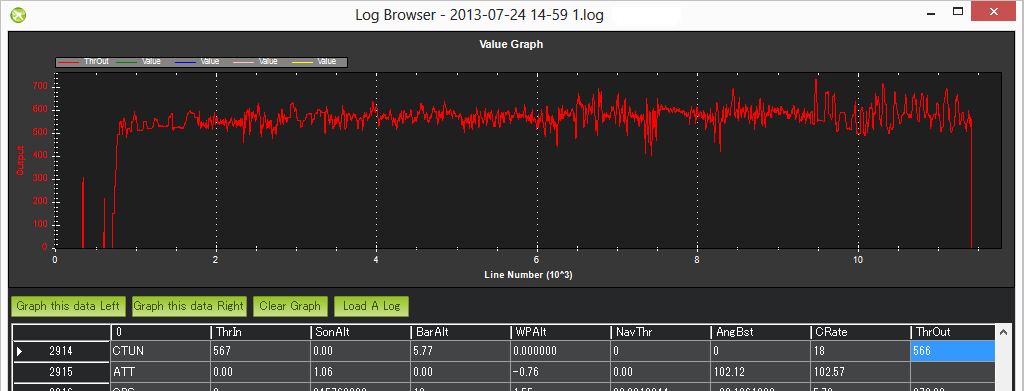
- 上图的例子,油门悬停值大概在566,是一个正常的范围
- 注意:如果油门低于300(30%),那么你的飞行器可能动力太猛,可能是电池电压过高(电池电压与马达KV值不匹配),或者重量搭配不合适(增加电池容量而增重)。
- 如果平均数值大于700(70%),那么你的飞行器可能是动力不足的,检查电池与电机的搭配或者其他因素