硬件连接
多旋翼飞行器
第一次设置
系统组成
地面站使用
Mission planner
地面站/驱动安装
连接地面站
飞行数据
飞行计划
初始设置
配置/调试
航点命令和事件
CUAV Hfight
组装飞行器
加载固件
在线烧录固件
烧录本地固件
硬件连接
连接电调与电机
机架设置
遥控器校准
指南针校准
加速计校准
飞行模式设置
电池监视器
ESC电调校准
故障安全机制
遥控器失控保护
电池保护
GCS地面站丢失保护
EKF故障保护
简单电子围栏
多边形围栏
碰撞撞击保护
振动保护
地形数据丢失保护
降落伞
第一次飞行
飞行模式介绍
Stabilize增稳模式
Alt Hold定高模式
FlowHold光流定高模式
Loiter悬停模式
RTL返航模式
Smart RTL智能返航模式
AUTO自动模式
Guided引导模式
Acro特技模式
Brake 刹车锁定模式
PosHold定点模式
Circle绕圈模式
Drift漂移模式
Simple简单模式
Follow Me 跟随模式
Sport运动模式
autotune自动调参模式
Land降落模式
Pre-arm报错信息分析
解锁和上锁
初次起飞
基本调参
扩展调参(PID)
震动测试
油门悬停点
自动微调
进阶设置
自动调参
辅助功能开关
气压计温度补偿
船模式
can总线设置
指南针设置(高级)
限流和电压缩放
扩展卡尔曼滤波器(ekf)
地面效应补偿
飞行时间记录仪
电机推力扩展
避障
重置参数
RC输入通道映射
全部参数表
RC输出映射
传感器位置补偿
传感器测试
遥测或串口设置
地形跟随
UBlox gps配置
UAVCAN设置
RTK测向/双天线测向
日志概述和分析
闪存日志分析
诊断硬件问题
遥测日志分析
任务规划
航点命令和事件
可选硬件
数传遥测模块
数传连接CUAV HFight
数传连接mp地面站
xbee/xtend/sx数传
xbee/xtend调试
点对点通信
多点通信
修改波特率及ID
xbee模块强制恢复固件
3DR数传
3dr数传故障排除教程
3DR数传调试教程
3dr数传使用教程
模拟图传
电压电流计
PM电源模块
HV_PM高电压电源模块
CPBD高压分电板
GPS定位系统
ublox gps模块
rtk 差分gps
测距定高模块
SF10/SF11 激光雷达
Lightware SF02测距仪
i2c maxsonar声 纳
模拟声呐
Lidar_lite测距仪
扩展显示屏
IST8310指南针
安全开关和蜂鸣器
PPM编码器
继电器开关
RSSI信号强度指示
相机云台
相机云台
快门触发
CAN通信电调
外置led
降落伞
精确着陆和悬停( IRLock)
农药喷雾器
OSD
起落架
故障排除指南
SITL模拟器
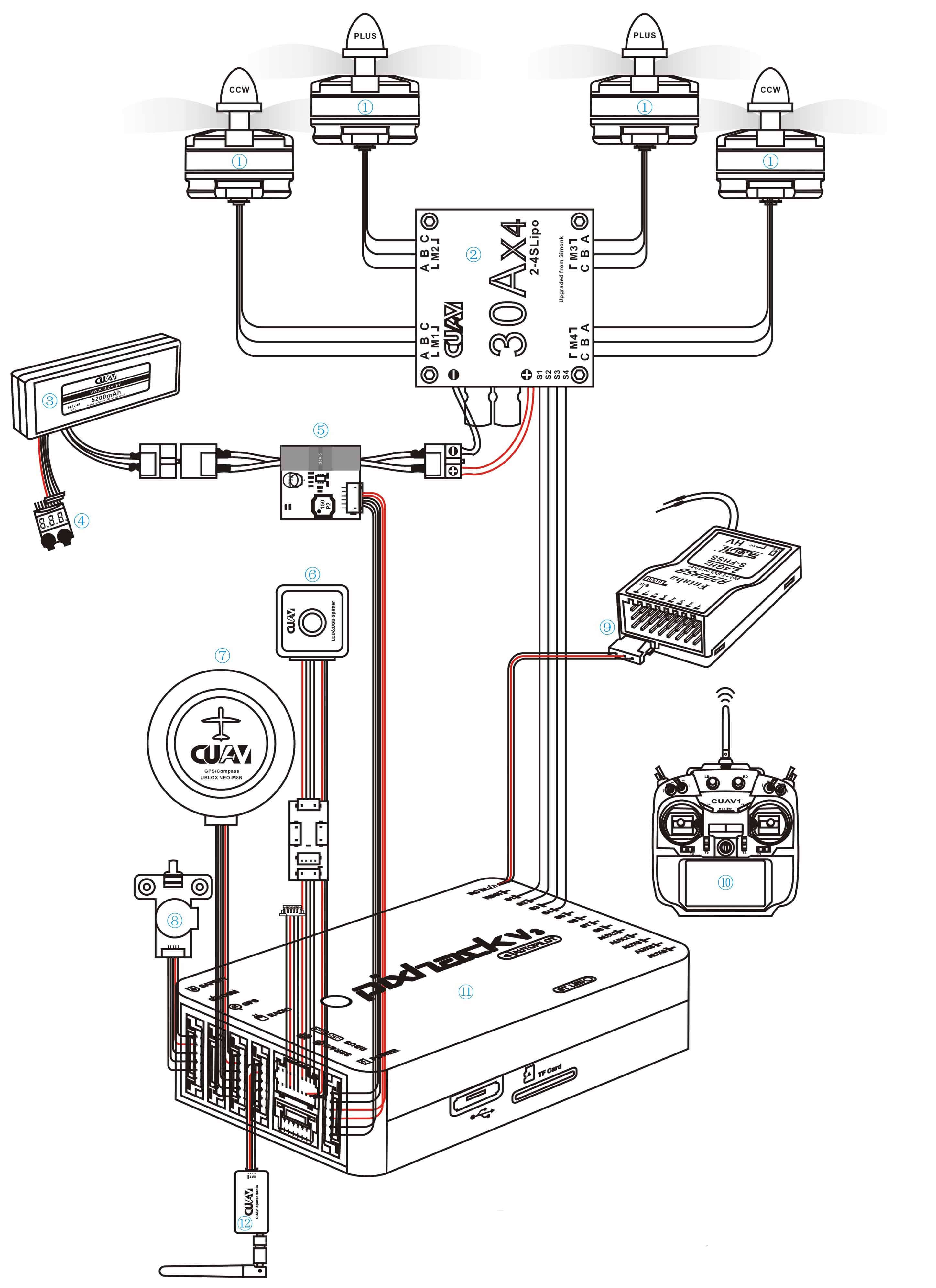
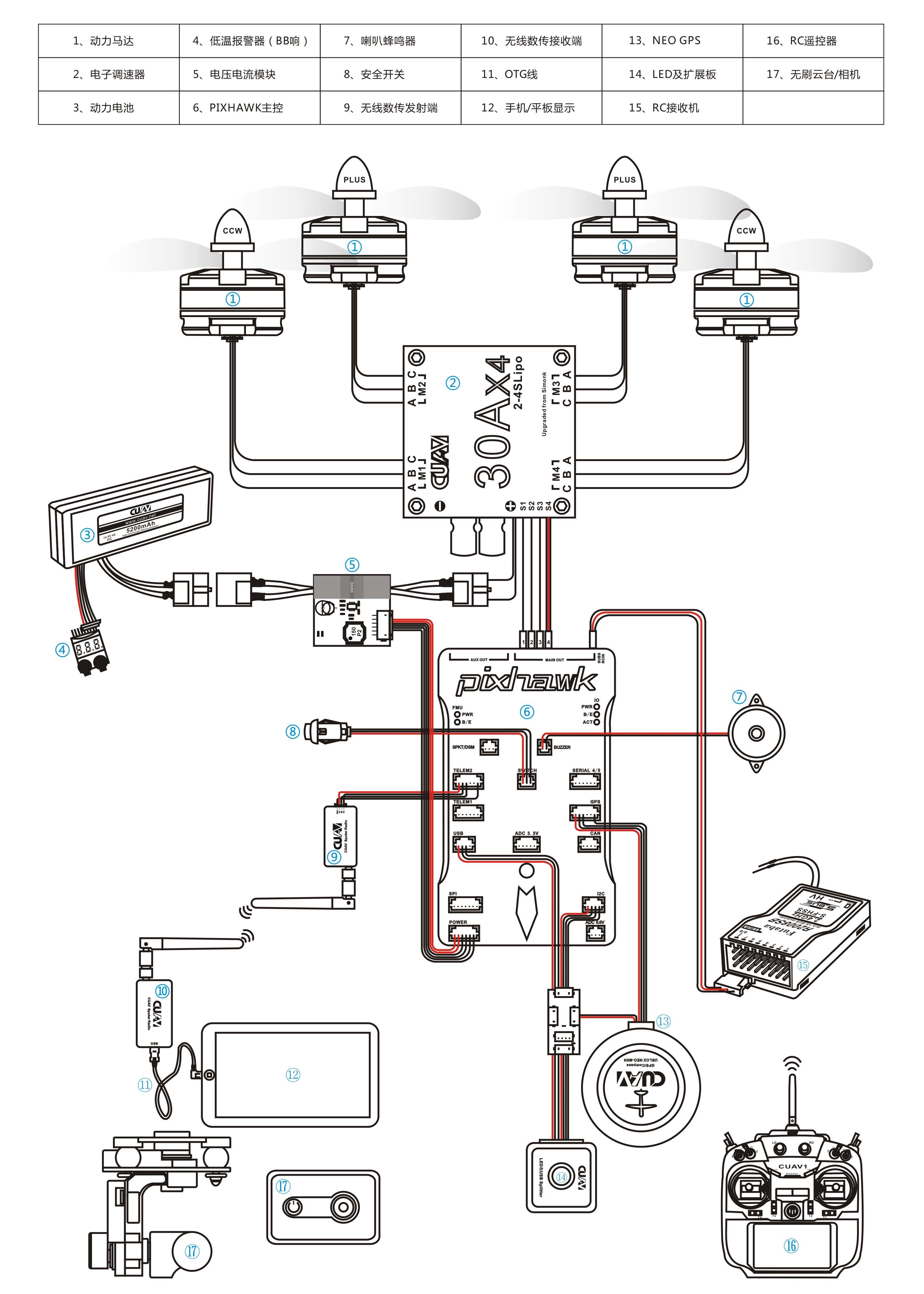
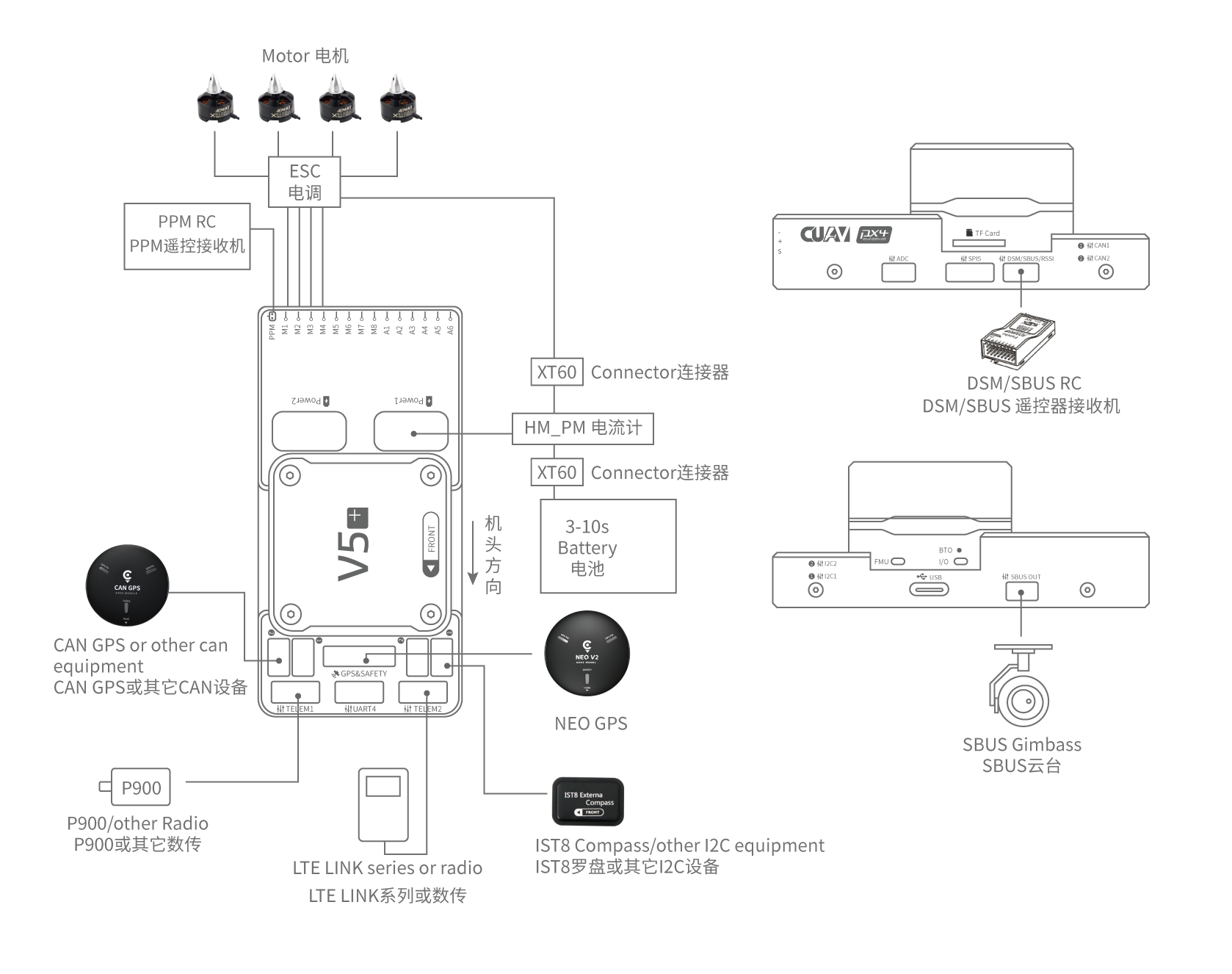
硬件连接
为了帮助您更快速的完成硬件连接,下面将描述最简单的四旋翼整体硬件框架。
Pixhack系列
Pixhawk
V5+/NANO
上图为四合一电调,一般电调为一个电机连接一个电调。
results matching "
"
No results matching "
"