加速计校准
本文介绍了如何执行基本的加速度计校准(使用 Mission Planner)。
加速度计校准在ArduPilot中是必需的。
3D加速计校准
如果飞控采用非标准(即箭头未指向前方)安装方向,则在进行加速度计校准之前,请确保正确设置了AHRS_ORIENTATION。
- 在地面站》初始设置》必要硬件》加速计校准
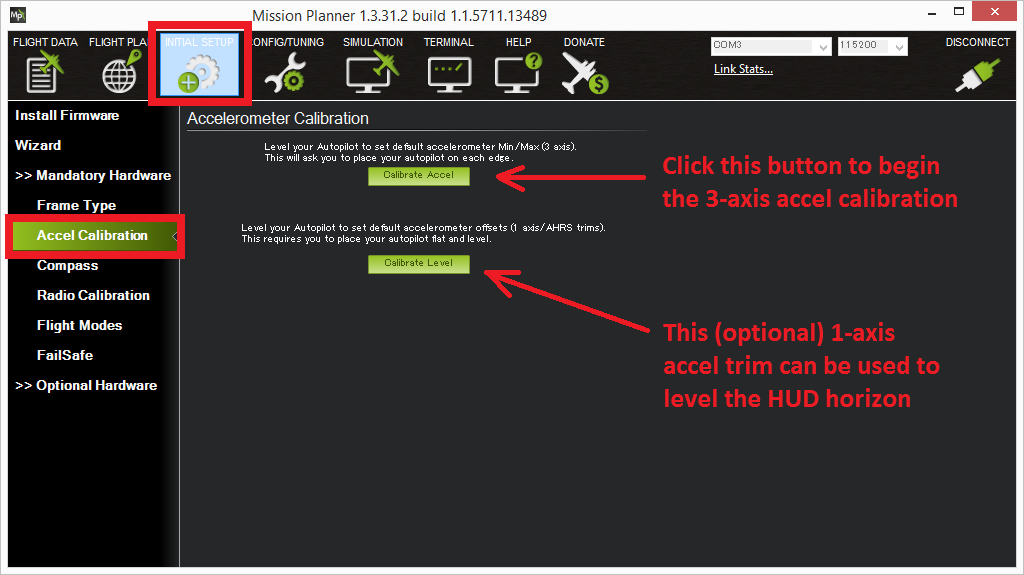
上部箭头标识绿色框处为六轴(3D)加速计校准;下部箭头标识绿色框处为加速计中位/水平校准;AC3.4.0及以上版本固件需要进行3D校准和水平校准。
- 单击“ 校准加速计”以开始校准。 Mission Planner将提示您将无人机谁水平放置,放置完成后点击“完成时单击按钮”然后根据提示继续校准下一个方向。
校准位置为:水平,右侧,左侧,机头向下,机头向上及其背面。


重要的是,在每个步骤中点击该键后,无人机必须立即保持静止。 如果无人机的尺寸较大,不方便放置,则可以在装机前校准。 正确的水平位置是最重要的,因为这是您的无人机飞行时的水平参考;所以必须进行水平校准。
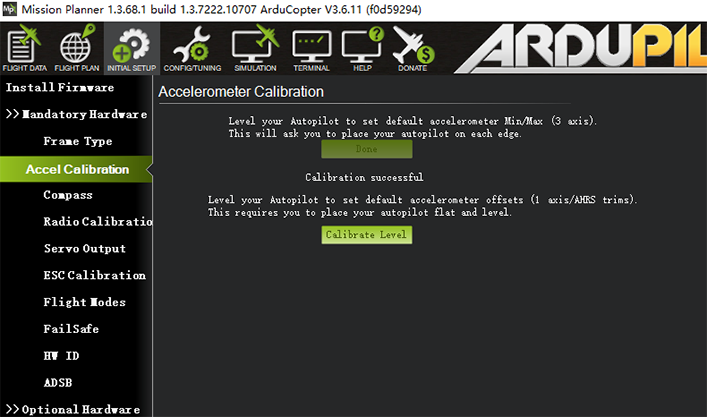
- 完成校准过程后,Mission Planner将显示“校准成功!”,如下所示。
水平校准
AC3.4.0及以上版本固件需要进行3D校准和水平校准;以保证飞行时水平参考的正确性。
- 校准加速计后;点击“calibrate LEVEL"按钮;飞控将进入初始化(LED快速闪烁);当按钮变成 "completed"完成水平校准。

完成了校准加速计和罗盘后,建议重新上电,不然可能出现一些异常的报错。