降落伞
本主题介绍如何设置手动和自动降落伞释放。
可能会发生危险。请谨慎使用此功能
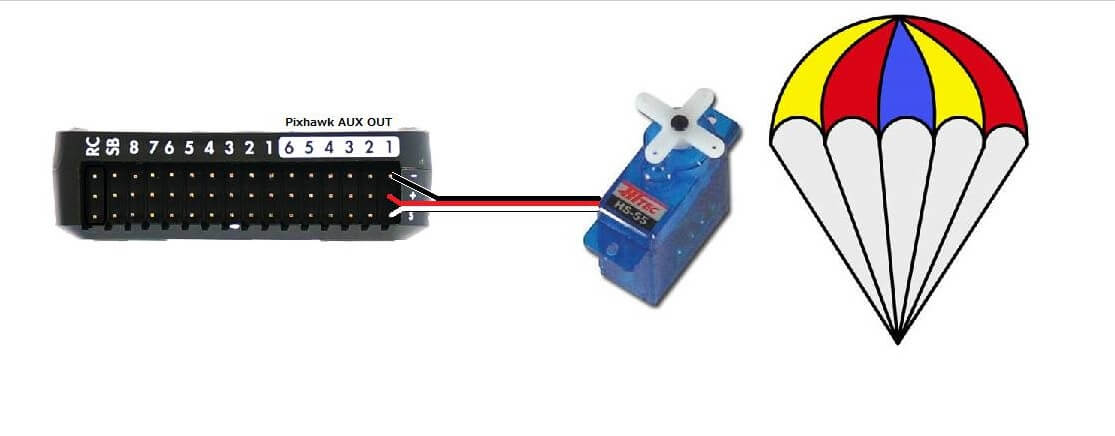
连接到Pixhawk
降落伞版本可以从继电器或触发机制PWM(即伺服),但因为一个问题与继电器引脚被拉在启动高,我们 建议使用PWM,特别是Pixhawk的AUX1到AUX4别针。
通过mission planner计划
要配置降落伞释放,请先连接Mission Planner,然后打开配置 / 调试》全部参数表页面并设置以下参数。
CHUTE_ENABLED =1CHUTE_TYPE =10设置为PWM控制应将
CHUTE_SERVO_ON设置为释放降落伞所需的PWM值CHUTE_SERVO_OFF应该是释放前的PWM值
如果使用AC3.5(或高)设置SERVO9_FUNCTION =“27”。 SERVO9对应Pixhawk的AUX OUT 1.要使用AUX OUT2,请将SERVO10_FUNCTION设置为27,依此类推。
如果使用AC3.4.6(或更低)设置RC9_FUNCTION =“27”。RC9对应Pixhawk的AUX OUT 1.要使用AUX OUT2,请将RC9设置为27,依此类推。


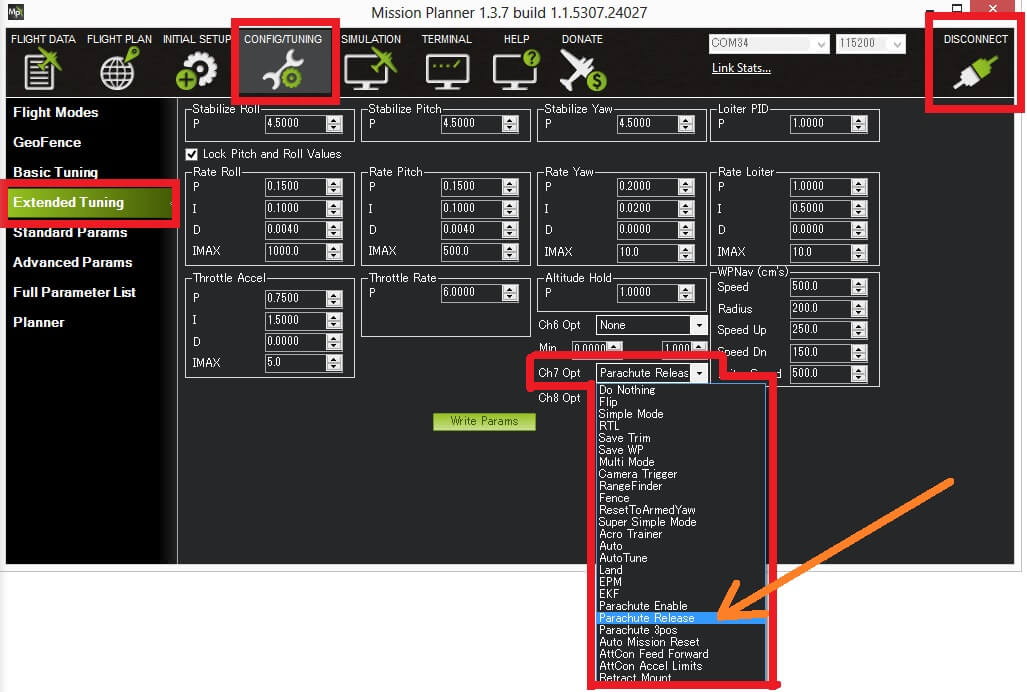
- 设置Ch7从Mission Planner的扩展调整页面手动设置降落伞。
降落伞何时会开启?
当“碰撞检查”功能确定飞行器失去姿态控制并开始下落时,电机将停止,降落伞将自动展开。对于碰撞检查器触发降落伞的释放,需要保持2秒都是满足以下条件:
电机已解锁
飞行器不是“降落”(如果输出油门小于25%,电机达到下限,飞行器旋转超过20度 / 秒,不是飞行员要求降落,这个姿态保持不超过一秒 飞行器会认为是自己降落)
飞行器不处于FLIP或ACRO飞行模式
飞行器的侧倾角和/或俯仰角相对于目标倾斜角偏差大于20度
气压计测量出飞行器没有爬升
飞行器高于CHUTE_ALT_MIN高度
测试降落伞
取决于释放机制,降落伞的释放可能很危险,因此在执行这些测试时请小心,请适当地卸下降落伞和车辆螺旋桨。
要测试手动部署:
- 将
CHUTE_ALT_MIN参数设置为零以禁用最低高度检查 - 以稳定模式解锁电机并将油门升至最小
- 将Ch7开关移到高位置
- 您应该看到电动机停止运转,降落伞伺服系统运动,并且如果安装了遥测功能, “Parachute: Released!”应该出现在“飞行数据”屏幕的HUD上。
要测试自动部署:
- 将
CHUTE_ALT_MIN参数设置为零以禁用最低高度检查 - 以稳定模式解锁电机并将油门升至最小
- 以某种方式使无人机倾斜至少20度
- 2秒钟后,电动机应停止运转,降落伞伺服器将移动,并且如果安装了遥测功能, “Parachute: Released!”应该出现在“飞行数据”屏幕的HUD上。
- 测试完成后,将CHUTE_ALT_MIN返回所需的高度(默认为10m)