飞行计划/任务规划
概述:
飞行计划是MP里边最重要的功能之一: 一般玩家可以用于规划最简单的飞行任务,包括对每个航点的高度控制,待留时间,相机触发、各种条件触发、通道触发、甚至自动起飞和降落规划等等
行业用户还可以做测绘规划等等
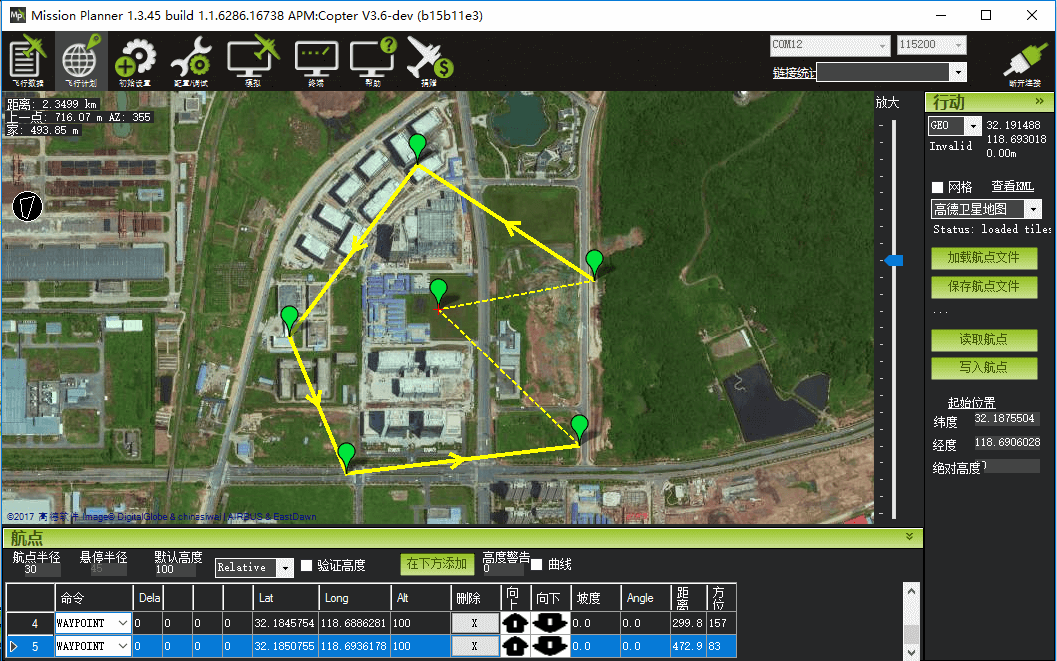 这里主要讲解的为MP地面站的任务规划功能,但是其它地面站的航点规划理念其实都是很类似的.
这里主要讲解的为MP地面站的任务规划功能,但是其它地面站的航点规划理念其实都是很类似的.
自动任务举例
- 在mission plnner任务规划界面,创建多航点区域
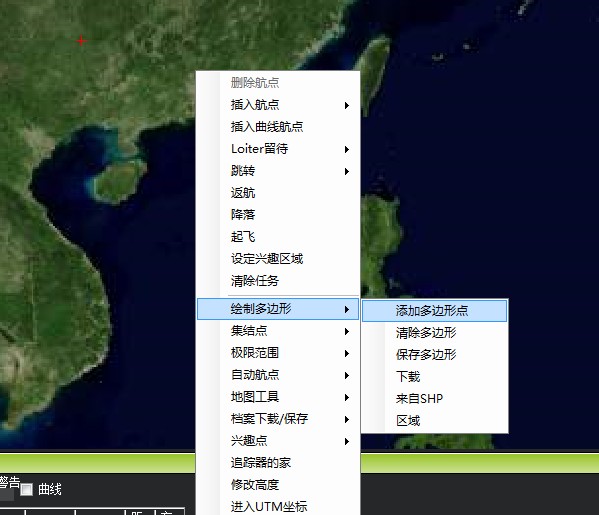
在区域内,点击鼠标右键打开菜单并选择自动航点》Survey(Grid)

mission planner将显示配置界面,这个界面定义了相机参数并自动计算拍照距离即DO_SET_CAM_TRIGG_DIST命令参数,您也可以根据实际情况设置参数。
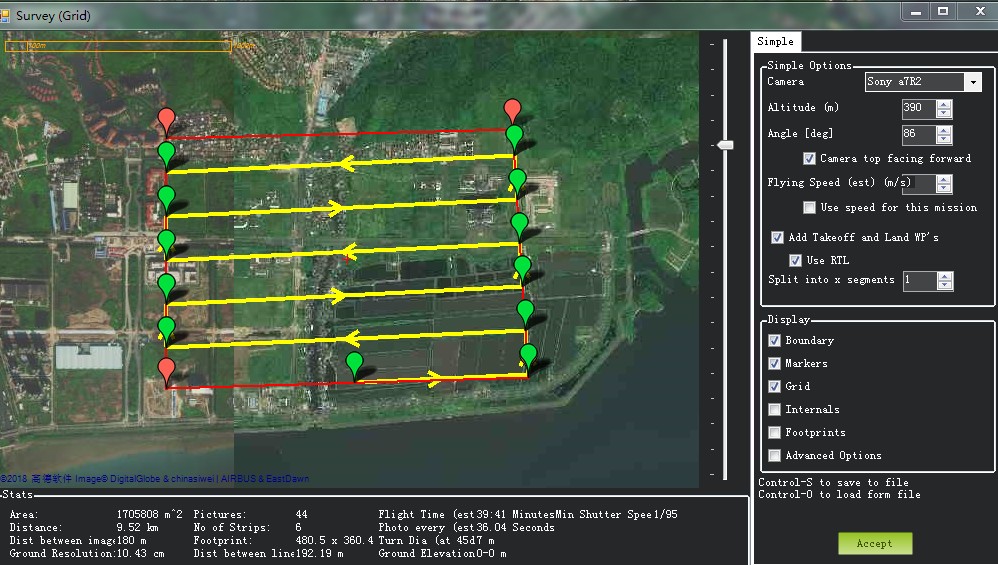
- 如您接受这些参数,请点击accept,mission plnnaer将生成一系列航点覆盖指定区域,包括起飞点和着陆点。调用DO_SET_CAM_TRIGG_DIST指令用于设置相机快门指令的距离,最后再次调用DO_SET_CAM_TRIGG_DIST来设置参数回0,停止拍照;注意两次调用的参数不同。