Mission planner规划航点及任务
本文介绍的方法适用于运行Ardupilot固件的飞行器。
设置家的位置
对于直升机/多旋翼,家的位置为解锁起飞的位置。如果飞行器执行rtl返航将返回到解锁起飞的位置,所以需要把飞行器放置在您想降落的位置。
对于固定翼,家的位置为首次获取到的gps定位位置,如果执行rtl将返回首次获取到gps定位的位置。
可以在地面站地图上移动“home”图标更改和设置家的位置。
说明
在下面的截图中,一个直升飞机的任务是从20米的自动起飞开始; 然后去航点2上升到100米的高度,然后等待10秒钟; 那么飞行器将进入航点3(途中降至50米高度),然后返回起始点。由于默认海拔高度为100米,所以返回到100米。返回到到起始位置后,飞行器将着陆。任务假设起始位置设为家的位置。
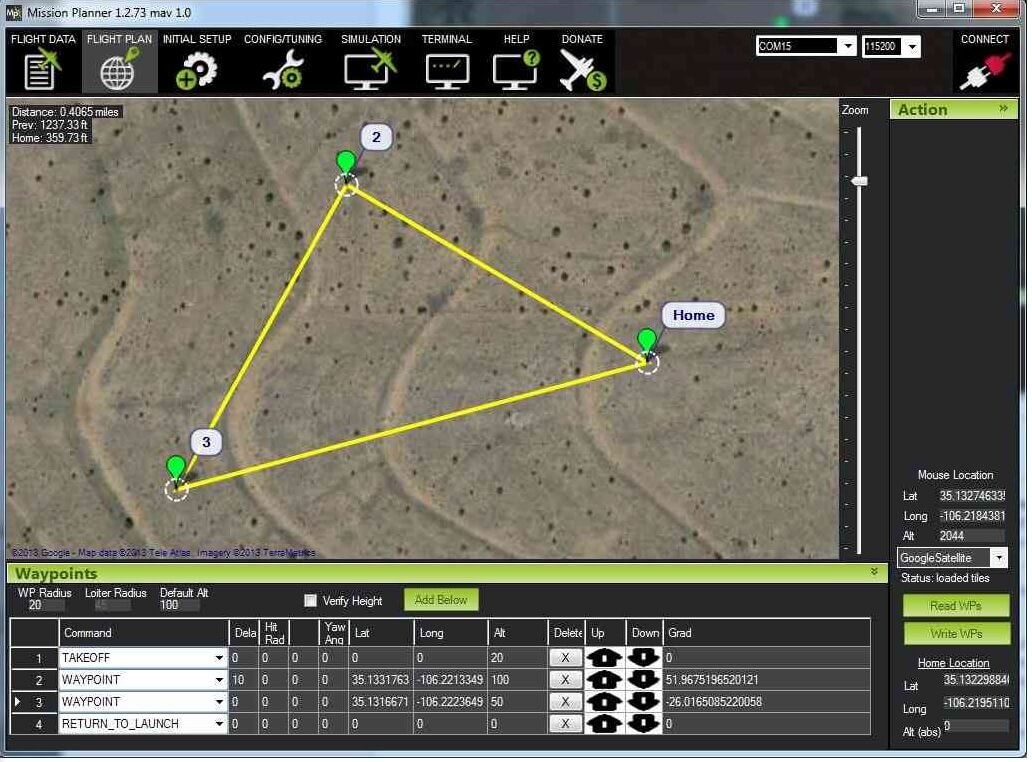
您可以输入航点和其他命令(有关详细信息,请参阅下面的任务命令部分)。在每行的下拉菜单中,选择所需的命令。列名称将会更改,以显示该命令需要哪些数据。可以通过点击地图输入纬度和经度。海拔高度是相对于你的起始高度/家的位置,如果你设置100米,它将飞行100米以上。
默认Alt是输入新航路点时的默认高度。它也是RTL(返回启动)模式飞行高度,如果你有设置默认ALT,该高度就是rtl飞行高度;如果您没有设置,您的飞机将尝试维持开启RTL时的高度。
verify alt(验证高度) : 任务规划器将使用Google Earth拓扑数据在每个航路点调整所需的高度,以反映下面的地面高度。所以如果你的航路点在山上,如果选择了这个选项,任务计划员将根据山的高度增加你的航点设置。这是一个很好的方法,以确保你不会撞到山!
规划好任务后,选择写入,并将其发送到飞控并保存在EEPROM中。
您可以通过选择“读取”来确认它是您想要的。
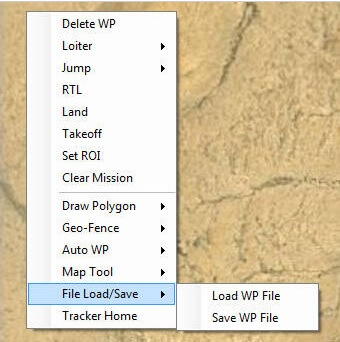
通过右侧按钮可以保存航行任务,加载航行任务,方便重复执行任务。
提示
下载离线地图 您可以下载离线地图。单击“地图工具”按钮》预读取航点路径(离线地图),然后按住Alt键绘制一个框以下载所选位置的图像。
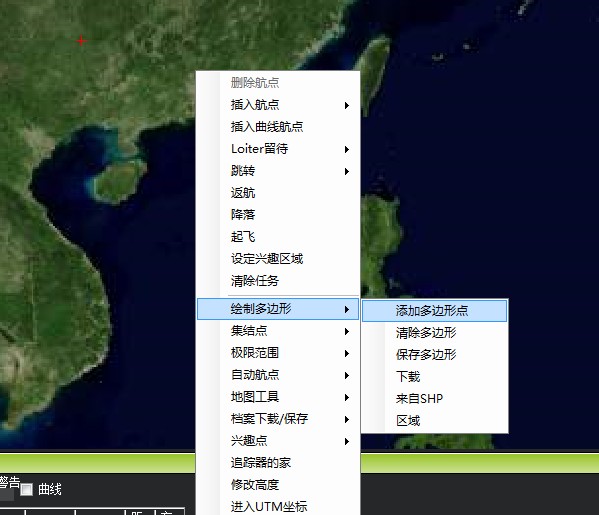
绘制多边形
这允许您绘制多边形(右键单击),并自动在所选区域上创建航点。
绘制多边形区域 鼠标右键菜单》绘制多边形》增加多边形点的绘制一个多边形》自动航点》simple grid然后点击Grid菜单,在弹出的窗口填入每个航点距离高度》确认,然后在定义在每个航点的动作。
将您的家庭位置设置到当前位置 追踪器的家》设置在这,它将将您的家庭位置设置为当前坐标。
您可以通过右键单击一端并选择测量距离来测量航点之间的距离。然后在另一端上单击鼠标右键,然后再次选择“ 测量距离”。将打开一个对话框,显示两点之间的距离。
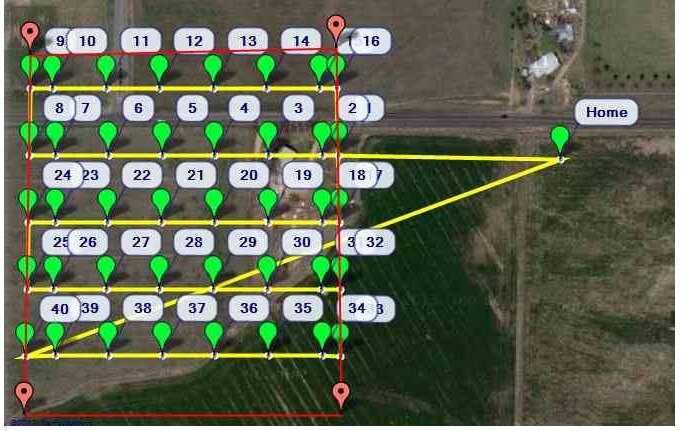
自动规划航线: Auto grid功能可以生成“割草机”轨迹,以收集当地的图片。在地图上选择鼠标右键,选择多边形绘制需要的区域,选择auto WP--Grid菜单,按照对话框自动处理高度和距离,将自动生成如下网格航点(操作跟快捷绘制多边形形航线一致:
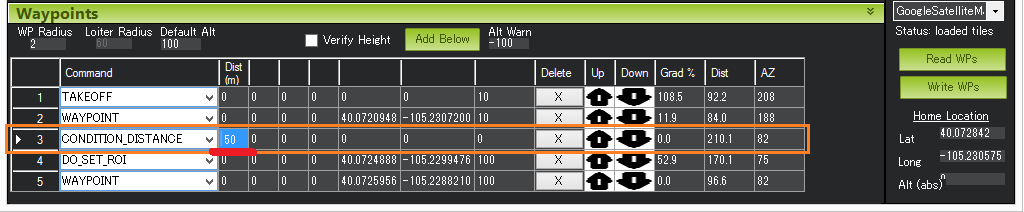
任务指令:在地图的下方有表格的列表,将按当前飞行器类型产生指令列表,并增加一列航向参数需要用户提供。 这些指令包括:导航到航点,临近盘旋,执行特殊动作(如拍照等)和条件指令.

任务指令参考
导航命令
导航命令用于控制车辆的运动,包括起飞,到和绕过航路点以及着陆。
NAV命令具有最高优先级。加载NAV命令时尚未执行的所有DO和CONDITION命令都将被跳过(例如,如果航路点已完成且另一航路点的NAV命令已被加载,并且与第一个航路点关联的未执行的DO / CONDITION命令将被丢弃。
Mission Planner使用完整命令名称的简化版本。例如,在MP中,诸如MAV_CMD_NAV_WAYPOINT,MAV_CMD_CONDITION_DISTANCE,MAV_CMD_DO_SET_SERVO之类的命令分别在WAYPOINT,CONDITION_DISTANCE和DO_SET_SERVO中列出。
WAYPOINT:导航到指定位置
TAKEOFF :起飞(从地面或手动发射)。它应该是所有无人机的第一条命令。
LOITER_UNLIM :不限时悬停在指定位置
LOITER_TURNS :在指定的位置盘旋(圈出)指定的匝数
LOITER_TIME :在指定的位置悬停的时间
RETURN_TO_LAUNCH :返回家位置或最近的Rally Point。
LAND :在指定位置降落
SPLINE_WAYPOINT :使用样条路径导航到目标位置。
GUIDED_ENABLE :启用GUIDED模式可将控制权移交给外部控制器。
DO_JUMP :跳转到任务列表中的指定命令。可以在继续执行任务之前将跳跃命令重复指定的次数,也可以无限期重复该跳跃命令。
在一次任务中,此命令最多可以调用15次,之后将忽略新的DO_JUMP命令。在AC 3.3中,最大数量从3更改为15。
命令参数
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | WP# | 要跳转到的命令的命令索引/序列号 |
| 参数2 | 重复 | 循环次数 |
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |

在上面的示例中,无人机在#1和#2航点之间来回飞行总共3次,然后才飞到#4航点。
条件命令
条件命令控制DO命令的执行。例如,条件命令可以阻止基于时间延迟的DO命令执行,直到无人机处于某个高度或距下一个目标位置指定距离为止。
在到达下一个航点之前,条件命令可能无法完成。在这种情况下,将跳过与最后一个航路点关联的所有未执行的DO命令。
- MAV_CMD_CONDITION_DELAY
到达航路点后,将下一个条件“ DO”命令的执行延迟指定的秒数(例如 MAV_CMD_DO_SET_ROI)。
该命令不会使无人机停止。如果无人机在延迟计时器完成之前到达下一个航路点,则延迟的“ DO”命令将永远不会触发。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 时间(S) | 延迟秒数(十进制)。 |
| 参数2 | ||
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |
- MAV_CMD_CONDITION_DISTANCE 延迟下一个“ DO”命令的启动,直到无人机在下一个航点的指定米数之内
该命令不会使无人机停止,它只会影响DO命令。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 时间(S) | 延迟秒数(十进制)。 |
| 参数2 | 距离(米) | 执行DO命令之前到下一个航路点的距离(米) |
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |
- CONDITION_YAW*
将无人机的机头指向(偏航)指定的方向。
DO命令
执行一次“ DO”或“ Now”命令以执行某些操作。与航路点关联的所有DO命令都将立即执行。
- SET_MODE 设置系统模式
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 模式,由 MAV_MODE定义 | |
| 参数2 | ||
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |
DO_CHANGE_SPEED 更改无人机的目标水平速度和/或油门。更改将一直使用,直到再次明确更改或重新启动设备为止。
DO_SET_HOME
将原位置设置为当前位置或命令中指定的位置。对于SITL工作,此处的高度输入需要参考绝对高度,并考虑SRTM高度。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 当前 | 设置家庭位置:1 =将家庭位置设置为当前位置。0 =使用消息参数中指定的位置。 |
| 参数2 | ||
| 参数3 | ||
| 参数4 | ||
| 参数5 | 纬度 | 目标家庭纬度(如果``param1 = 2'') |
| 参数6 | 经度 | 目标家庭经度(如果``param1 = 2'') |
| 参数7 | 高度 | 目标家庭高度(如果``param1 = 2'') |

- DO_SET_RELAY 将继电器引脚的电压设置为高(开)或低(关)
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 继电器编号 | 中继号 |
| 参数2 | 开(0)/关(1) | 设置继电器状态:1:将继电器设置为高/开(Pixhawk上为3.3V,APM上为5V)。0:设置继电器低电平/关闭(0v) |
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |

- DO_REPEAT_RELAY 在给定的周期内,将继电器引脚的电压/状态切换指定的次数。切换继电器会关闭继电器,反之亦然
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 继电器编号 | 中继号 |
| 参数2 | 重复# | 周期数-继电器应切换的次数 |
| 参数3 | 延误 | 循环时间(秒,十进制)-每次切换之间的时间。 |
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |

在上面的示例中,假设继电器首先关闭,则将其设置为高电平,然后在3秒钟后将其再次切换为低电平。
DO_SET_SERVO 将给定的伺服引脚输出设置为特定的PWM值。
| 指令栏位 | 区域 | 描述 | | :--- | :--- |:--- | | 参数1 |序号 |伺服编号-目标伺服输出引脚/通道编号。| | 参数2 |脉宽调制|输出的PWM值,以微秒为单位(通常为1000到2000)。| | 参数3 | | | | 参数4 | | | | 参数5 | | | | 参数6 | | | | 参数7 | | |

在上面的示例中,连接到输出通道8的伺服器将移至PWM 1700(伺服通常接受1000到2000之间的PWM值)。
从固件版本4.0及更高版本开始,此命令可以在其SERVOx_FUNCTION命令配置为0,1或51-66(禁用或RC直通)的任何输出上使用。
- DO_REPEAT_SERVO
在给定的周期数和设置的周期内,将伺服PWM输出引脚在其中间位置值和指定的PWM值之间循环。 中间位置值RCn_TRIM在通道的参数中指定(RC8_TRIM在下面的屏幕截图中)。默认值为1500。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 序号 | 伺服编号-目标伺服输出引脚/通道编号。 |
| 参数2 | 脉宽调制 | 输出的PWM值,以微秒为单位(通常为1000到2000)。 |
| 参数3 | 重复# | 周期数-将伺服器移至指定的PWM值的次数 |
| 参数4 | 延误 | 循环时间(秒)-每次伺服运动之间的延迟(以秒为单位) |
| 参数5 | ||
| 参数6 | ||
| 参数7 |
在上面的示例中,连接到输出通道8的伺服器将移至PWM 1700,然后在4秒后返回中间,再过4秒钟后它将再次移至1700,然后最终在再经过4秒后将其移至回到中间。
DO_SET_ROI 设置传感器组或无人机本身的关注区域(ROI)。然后可以使用它来控制无人机姿态和各种传感器(例如摄像机)的姿态。
DO_DIGICAM_CONFIGURE
配置机载摄像机控制器系统。
如果存在参数,则将参数转发到机载摄像机控制器系统(如3DR摄像机控制板)。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 模式 | 设置相机模式:1:ProgramAuto 2:光圈优先3:快门优先4:手动5:IntelligentAuto 6:SuperiorAuto。 |
| 参数2 | 快门速度 | 快门速度(秒除数)。因此,如果速度为1/60秒,则输入的值为60。支持的最慢快门触发器为1秒。 |
| 参数3 | 光圈 | 光圈:F档号 |
| 参数4 | ISO标准 | ISO编号,例如80、100、200等 |
| 参数5 | ||
| 参数6 | ||
| 参数7 | 发动机切断 | 相机触发之前的主机截止时间,以秒为单位/ 10(0表示没有截止)。 |
- DO_DIGICAM_CONTROL
AC3.3:控制车载摄像机控制器系统(例如3DR摄像机控制板)。
当前/AC3.3之前:触发一次相机快门。此命令不带其他参数。
以下参数反映了AC3.3中支持的字段。通常,如果将命令字段发送为0,则将其忽略。在AC3.3之前,所有参数都将被忽略。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 开关 | 会话控制(打开/关闭或显示/隐藏镜头):0:关闭相机/隐藏镜头1:打开相机/显示镜头 |
| 参数2 | 变焦位置 | 缩放的绝对位置。2x,3x,10x等。 |
| 参数3 | 缩放步骤 | 缩放步长值以从当前位置偏移缩放 |
| 参数4 | 对焦锁 | 焦点锁定,解锁或重新锁定:0:忽略1:解锁2:锁定 |
| 参数5 | 快门Cmd | 射击命令。任何非零值都会触发相机。 |
| 参数6 | ||
| 参数7 |

- DO_MOUNT_CONTROL
用于控制摄像头或天线安装架的任务命令。
该命令允许您指定要发送到相机云台的侧倾角,俯仰角和偏航角。这可用于在任务中的不同时间将摄像机指向特定方向。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 会话控制(打开/关闭或显示/隐藏镜头):0:关闭相机/隐藏镜头1:打开相机/显示镜头 | |
| 参数2 | 俯仰,以度为单位。 | |
| 参数3 | 横滚,以度为单位。 | |
| 参数4 | 方向,以度为单位。 | |
| 参数5 | ||
| 参数6 | ||
| 参数7 | MAV_MOUNT_MODE__枚举值。 |

- MAV_CMD_DO_SET_CAM_TRIGG_DIST
以固定的距离间隔触发相机快门。该命令在摄像机勘测任务中很有用。
| 指令栏位 | 区域 | 描述 |
|---|---|---|
| 参数1 | 相机触发距离间隔(米)。零以关闭距离触发。 | |
| 参数2 | ||
| 参数3 | ||
| 参数4 | ||
| 参数5 | ||
| 参数6 | ||
| 参数7 |

- DO_PARACHUTE
触发降落伞的任务命令(如果启用)。
- DO_GRIPPER
执行EPM抓爪的任务命令。
- DO_GUIDED_LIMITS 设置外部控制的限制。
相机控制与自动操作
相机快门和云台指令3个通道
在飞行器移动的间隔时间或指定的航点上执行快门动作,如果相机安装在云台上,还可以控制云台的指向
对于简单的应用,可以手动控制航点和快门指令,对于复杂的测绘任务,自动生成任意区域的指令任务。
云台指令:DO_SET_ROI云台指向指定区域,DO_MOUNT_CONTROL云台控制到roll,pitch,yaw方向
伺服指令:DO_SET_SERVO:DO_SET_RELAY给指定的驱动信号
自动任务举例:
- 在mission plnner任务规划界面,创建多航点区域
在区域内,点击鼠标右键打开菜单并选择自动航点》Survey(Grid)

mission planner将显示配置界面,这个界面定义了相机参数并自动计算拍照距离即DO_SET_CAM_TRIGG_DIST命令参数,您也可以根据实际情况设置参数。
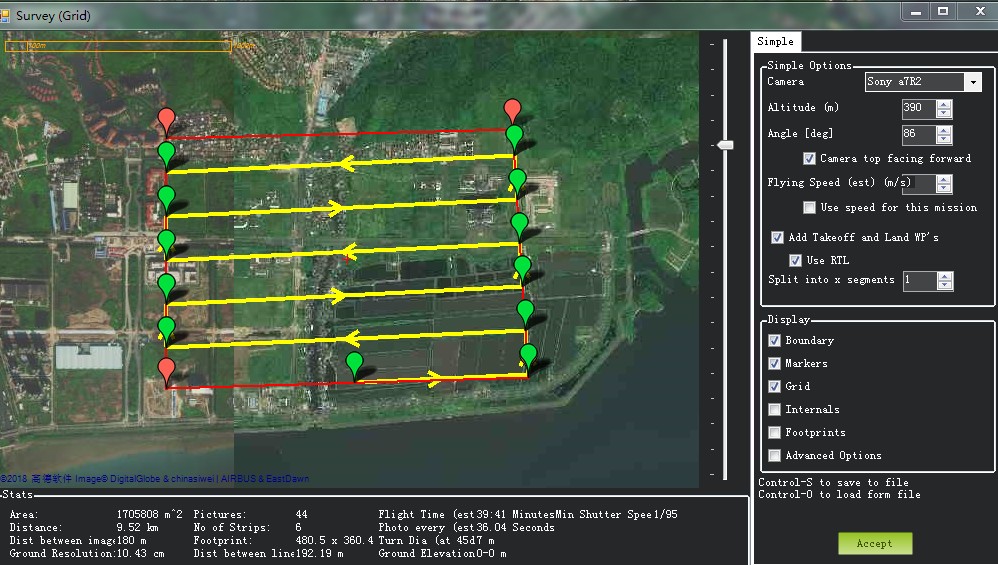
- 如您接受这些参数,请点击accept,mission plnnaer将生成一系列航点覆盖指定区域,包括起飞点和着陆点。调用DO_SET_CAM_TRIGG_DIST指令用于设置相机快门指令的距离,最后再次调用DO_SET_CAM_TRIGG_DIST来设置参数回0,停止拍照;注意两次调用的参数不同。