多边形围栏
概述
直升机3.4(及更高版本)包括支持多达84点的多边形围栏。 这个围栏的目的是试图通过启动一个RTL来阻止你的飞行器飞出多边形内的区域,如果在Loiter模式下飞行,飞行器通常会在突破围栏之前停下来。 这个功能是简单的圆形围栏的扩展。
在mission plnner中启用围栏
将您的飞行控制器连接到Mission Planner
进入配置/调整| 地理围栏屏幕
单击“启用”并将类型设置为“polygon"选项
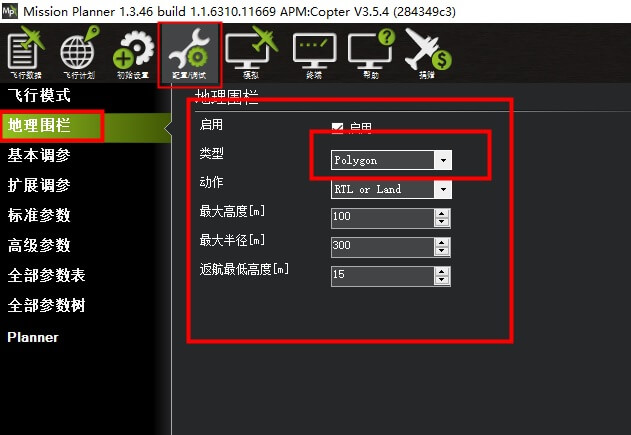
将行动设成“RTL或降落”
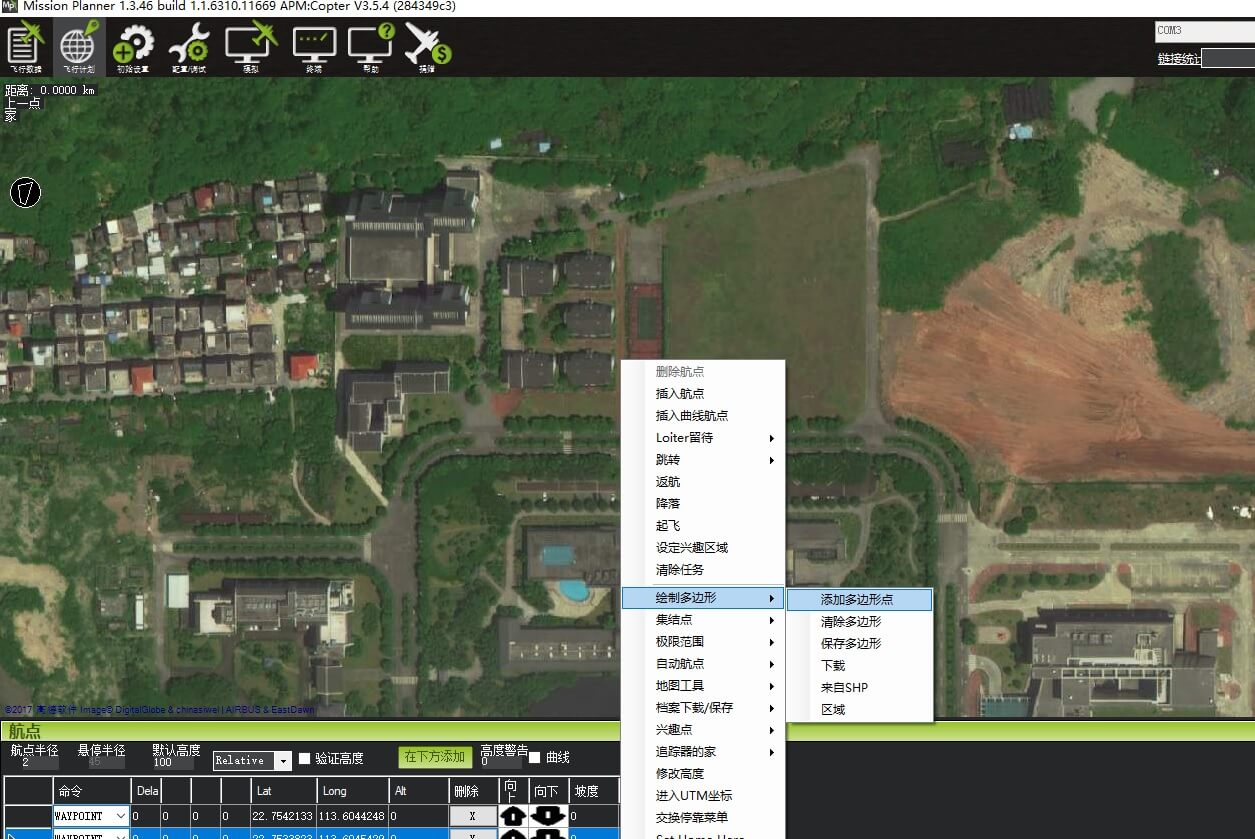
转到飞行计划界面
在地图上单击右键并选择“绘制多边形”>>“添加多边形点”
点击地图上的其他点来定义多边形
- 多边形定义完成后,您必须单击鼠标右键并单击“极限范围”>>“设置返回位置”。 这个位置实际上并不是由直升机使用的,但是它必须被设置,因为和Plane一样使用了相同的底层库。
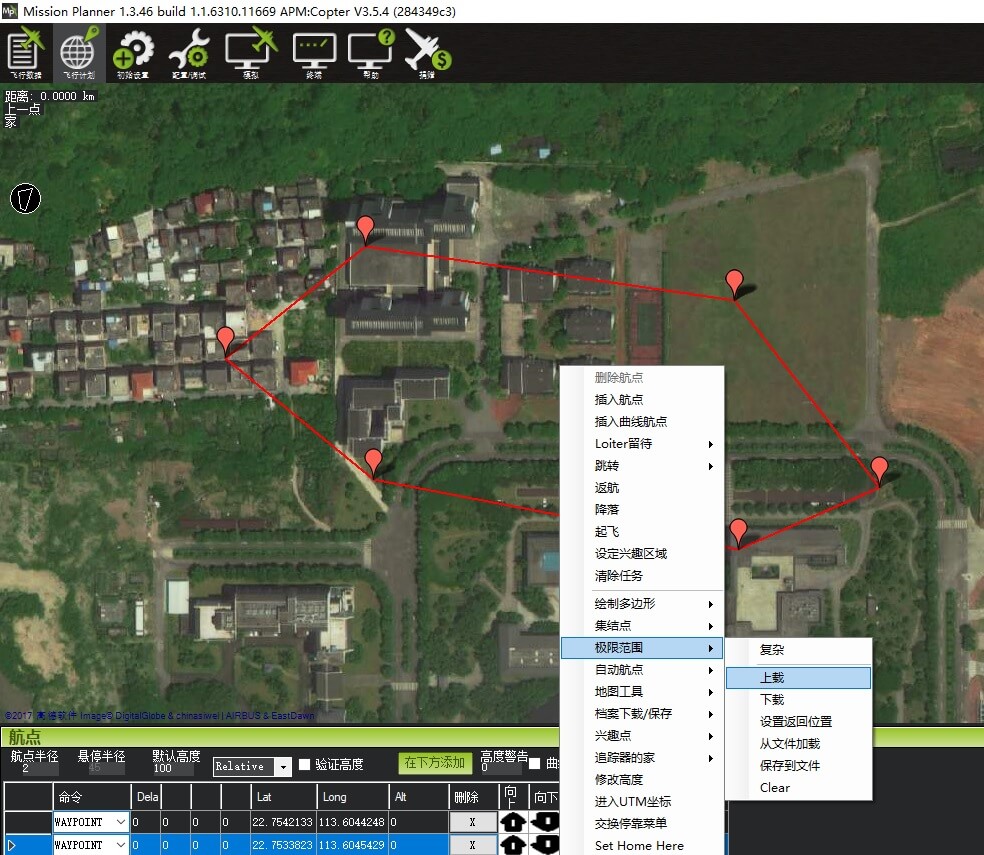
使用鼠标右键单击并点击“极限范围”上传多边形围栏到飞行器>>“上传”