RC遥控器校准
概述:
本文介绍了如何使用Mission Planner执行无线电控制校准。
遥控器允许飞行员设置飞行模式、控制无人机的运动和方向,还可以打开/关闭辅助功能(例如,升高和降低起落架等)。
遥控器校准涉及捕获每个RC输入通道的最小值,最大值和中位值,以便ArduPilot可以正确反应您的输入。
通道使用
多旋翼最少需要使用5个控制通道(默认1横滚、2俯仰、3油门、4方向、5模式切换)
其它没有使用的通道可以外接其它设备或者闲置不用
检查遥控的信号
确保电池已断开连接(这很重要,因为在校准过程中可能会意外触发解锁使电机旋转)
确保遥控器接收机已连接到自动驾驶仪
打开您的遥控发射机,如果它会自动回中,请确保它们在中间
- 使用USB电缆将自动驾驶仪连接到PC
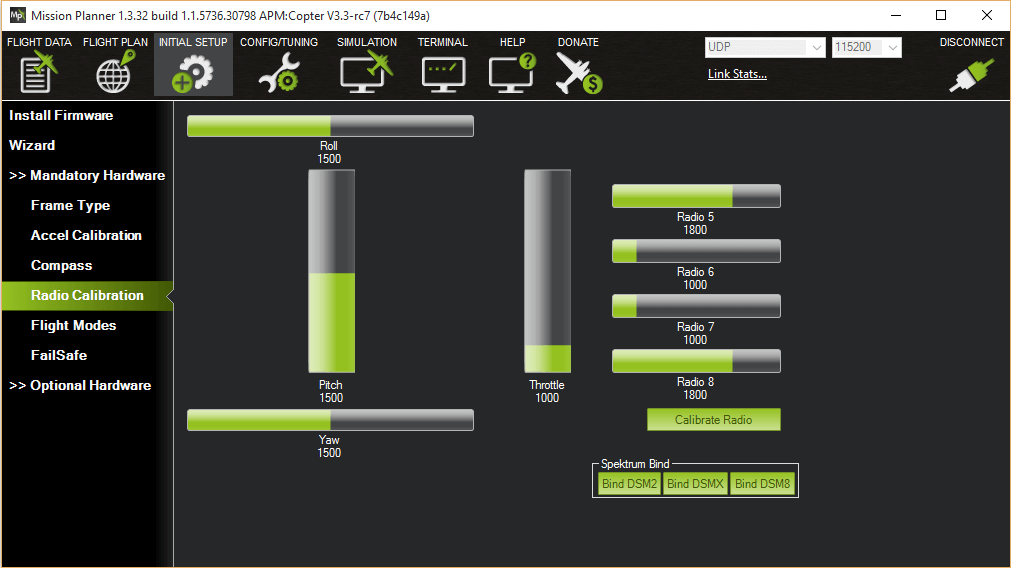
- 在MP地面站上,按“连接”按钮,然后打开初设设置》必要硬件》遥控器校准界面
- 应该出现一些绿色的条,表明ArduPilot正在接收来自发送器/接收器的输入。如果没有条出现,请检查飞控与遥控器的连接以及遥控器与接收机的通信。
如果遥控器接收机指示灯不亮,可以尝试倒置插入连接器;如果您的遥控器和接收机未进行过对频,您需要参阅遥控器手册进行对频。
通过移动摇杆,旋钮和开关并观察绿色的条(如果有的话)移动,检查发射机中的通道映射(即检查哪些输入通道由发射机的摇杆,开关和旋钮控制)。
- 确定您的遥控发射器是Mode1还是Mode2(请参见下文)
- 横滚杆应控制通道1
- 俯仰杆应控制通道2
- 油门杆应控制通道3
- 偏航杆应控制通道4
应该设置一个三挡开关开关(以控制飞行模式)控制通道5(默认);您也可以通过设置FLTMODE_CH或MODE_CH参数来修改通道几控制模式。
如果绿色条之一向错误的方向移动,则设置遥控器本身的通道反向;如果无法在遥控器中反转通道,则可以通过直接更改RCx_REVERSED参数(其中“ x”是输入通道从1到4)来反转通道。
执行校准:
- 点击“遥控器校准(radio calibration)”
- 弹出对话框选择OK
- 将遥控器的操纵杆,旋钮和开关移至极限位置。红线将出现在校准条上,以显示到目前为止看到的最小值和最大值
- 选择完成后单击
- 将出现一个窗口,提示“确保所有操纵杆居中,油门向下,然后单击确定以继续”。将油门调至零,然后按“确定”。
- 任务计划器将显示校准数据的摘要。正常值的最小值约为1100,最大值约为1900。
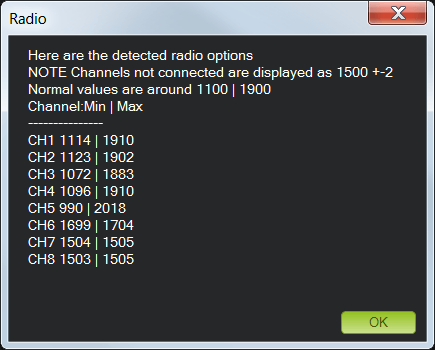
标准数值的1100-1900,特别是油门通道,不要过低或者过高,以免出现异常
遥控器控制类型:
遥控器一般常见的一共有3个控制模式:
- Model1 日本手:左边的摇杆控制Pitch俯仰和YAW方向,右边的摇杆控制 Throttle油门和ROLL横滚
- Model2 美国手:左边的摇杆控制Throttle油门和YAW方向,右边的摇杆控制 Pitch俯仰和ROLL横滚
- Model3 中国手:左边的摇杆控制Pitch俯仰和ROLL横滚 ,右边的摇杆控制 Throttle油门 和YAW方向
每种手法都有自己的优势,看个人习惯,没有最好的手法,只有最适合自己的手法
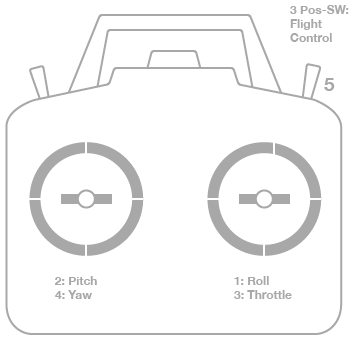
MODEL1日本手 示意图
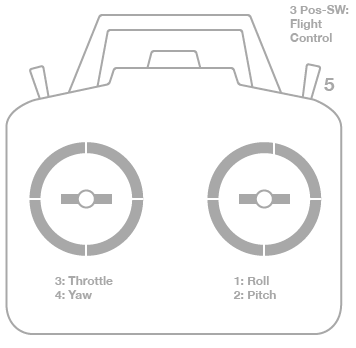
MODEL2美国手 示意图
您可以通过您的遥控器设置遥控器控制类型。