基本调参
本章节主要介绍基本的 横滚 俯仰 和油门的基本调参
概述
在初次飞行你可能感觉到,飞行器反应和控制并没有你想象中的理想,可能 姿态反应太慢,或者出现了抖动,或者油门响应太灵敏、油门响应太慢。不用担心,这些都可以通过简单调节参数获得更好的效果。如果你是高级老手熟悉PID控制理论,可以查看 高级调参指南,或者可以尝试一下自动调参。
现在版本的地面站,把复杂的调参简化为几个简单的模块,只需要简单的调整一下几个参数,基本可以获得比较理想的效果。
调参可以在飞行中进行,这些是实时生效的,
但是除非你是一个熟练的玩家,不然不建议你在飞行中进行实时调参
我们建议你在飞行器锁定后,再进行调整,每次调整的范围不应该太大。
横滚ROLL 和 俯仰PITCH 调参
调参一般可以通过一个数传与电脑地面站进行连接,下面讲解APMPlanner2 和 Mission Planner 基本调参方式
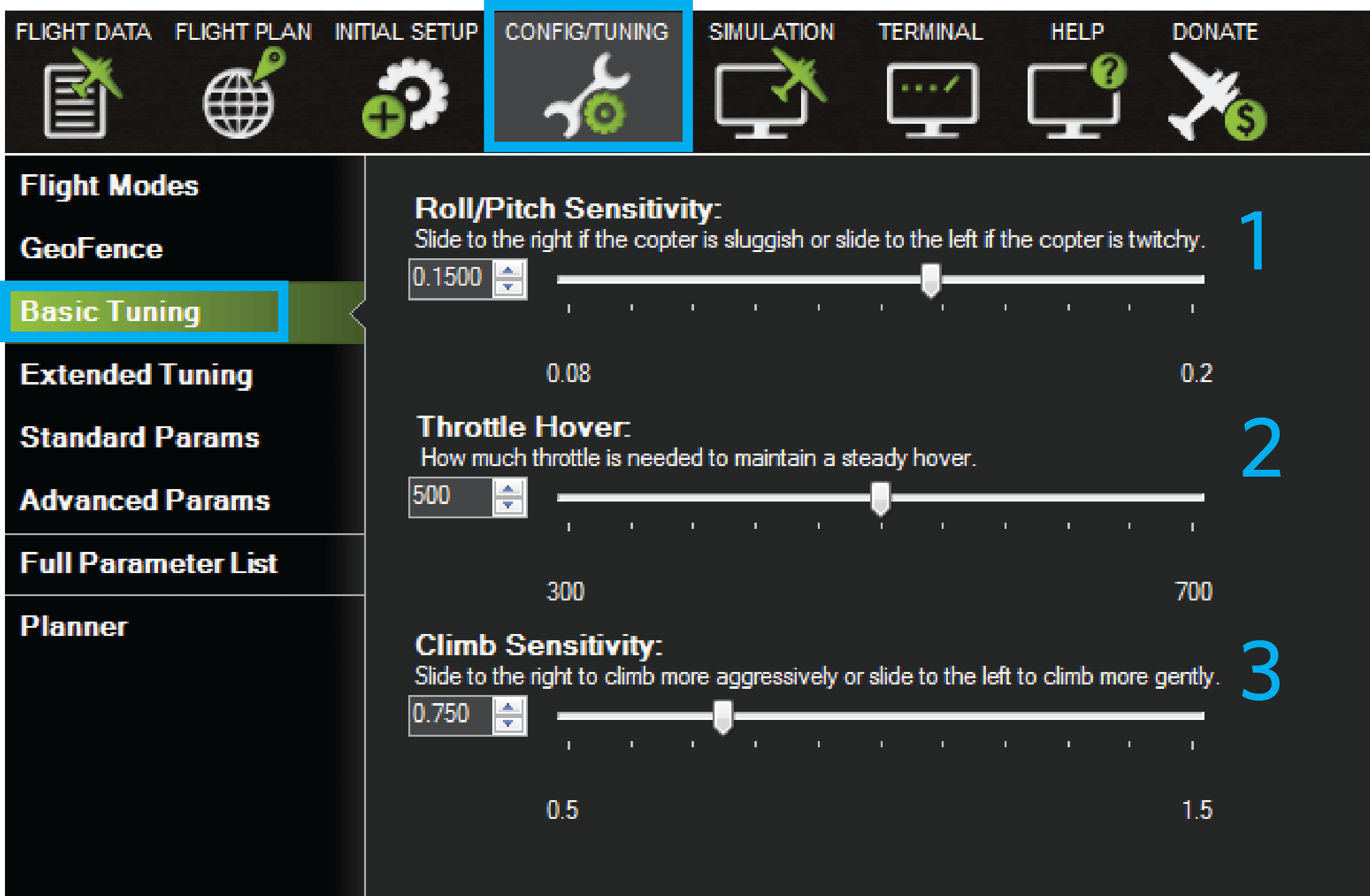
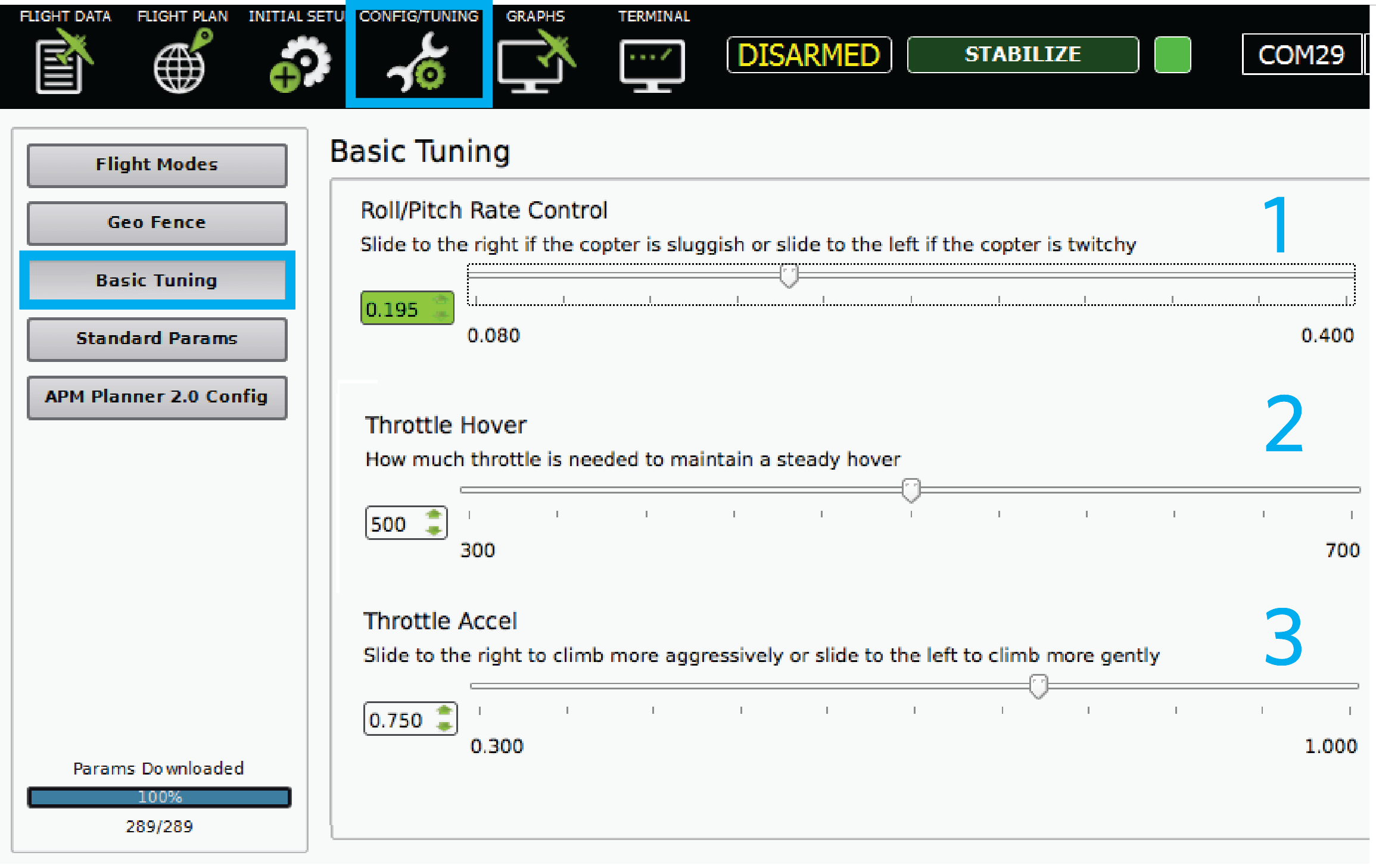
APMPlanner2 -CONFIG/TUNING-Basic Tuning选项
ROLL/Pitch Rate Control就是调节横滚和俯仰反应及修正灵敏度及力度的选项
如果你感觉你的飞机反应太快或者抖动太大,你可以尝试向左移动一个刻度(减小)
如果你感觉你的飞机修正力度不够或者反应太慢,你可以尝试往右移动一个刻度(增大)
然后再进行试飞看看有没改善,然后进行反复修改,直到达到理想效果:
Yaw调参
在上述屏幕截图中以橙色突出显示的稳定Yaw和速率Yaw参数可以控制偏航响应。 Yaw很少有需要调整的情况。
类似于Roll和Pitch,如果稳定Yaw P或速率Yaw P太高,直升机的航向将会受到影响。 如果太低,直升机可能无法维持目前的航向。
如自稳模式的调节部分所述,ACRO_YAW_P参数控制基于飞手的Yaw输入的直升机旋转速度。 当Yaw杆完全保持左或右时,默认值4.5命令旋转速度为200度/秒。 更高的值将使其旋转更快。
高度调参
在上述屏幕截图中,高度保持相关的调谐参数以绿色突出显示。
海拔高度P用于将高度误差(所需高度与实际高度之差)转换为所需的爬升或下降率。越高的速率将使其越积极地维持高度,但如果设置得太高会导致油门剧烈地响应。
节气门速率(通常不需要调谐)将期望的爬升或下降速率转换成所需的加速度向上或向下。
节气门加速PID增益将加速度误差(即所需加速度与实际加速度之间的差值)转换为电机输出。如果您修改这些参数,则应保持P与I的比例为1:2(即I的大小是P的两倍)。这些值不需要增加,但是对于非常强大的双绞器,您可以通过减少50%(即P至0.5,I至1.0)获得更好的响应。
有关详细信息,请参定高模式页面。
悬停调参
一般来说,如果Roll 和 Pitch调整正确,GPS和指南针将被设置并执行良好,并且振动水平在可以接受的范围内,悬停不需要进行太多调整,请参阅悬停模式页面了解有关可调参数(包括水平速度)的更多详细信息。
Throttle Hover 悬停油门调整
这个选项可以调整悬停油门的油门摇杆位置
如果你的飞机悬停油门高于中间位置,可以往左边调小一格刻度
如果你的飞机悬停油门低于中间位置,可以往右边调大一格刻度
Throttle Accel 油门响应速度调整
这个选项可以调整一个油门的响应速度
如果你的油门响应太快,轻轻一推油,飞高太快,可以降低油门的响应速度
如果你的油门响应太慢,推了油,而上升高度太慢,感觉没有力,可以尝试加大油门响应值
这个只能改善一部分油门问题,如果你的飞机动力配置不合理以及电池放电能力不够,可能效果不明